(54) ПРИВОД ПОДАЧИ ШПИИДЕЛЯ СТАНКА
ном положении механизм сцепления 17 выключен.
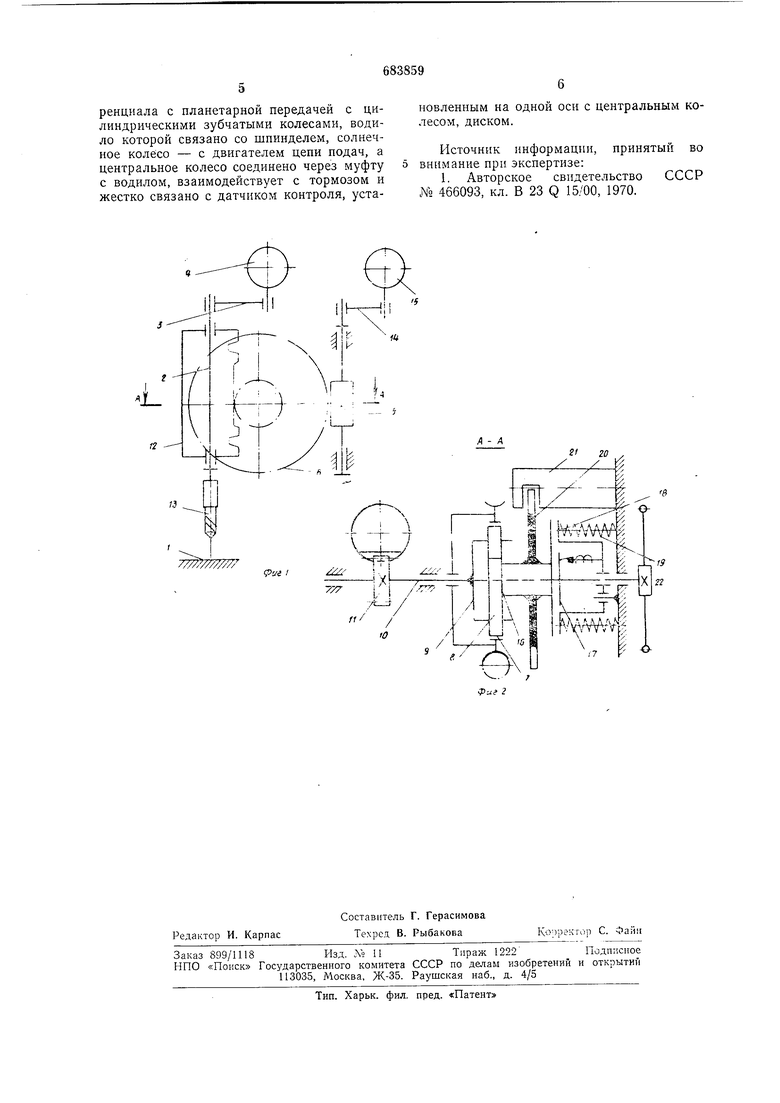
Устройство работает следующим образом. Двигатель 15 подачи включается на быстрое вращение, при котором через кинематическую цепь 14, червяк 5, червячное колесо 6, солнечное колесо 7 приводятся во вращение сателлиты 8. Усилие тормоза 18 выбирается таким образом, чтобы центральное колесо 16 не вращалось. Поэтому приводятся во вращение через сателлиты 8 и водило 9 вал 10 с шестерней //, осуществляется ускоренный ход пиноли 12 со щпинделем 2 ао скоростью подвода инструмента.
При касании режущим инструментом 13 поверхности обрабатываемой детали 1 движение пиноли 12, щестерни 11, вала W и водила 9 прекратится. Однако червячное колесо 6, солнечное колесо 7 и сателлиты 8 продолжают вместе .вращаться, вследствие чего начинает вращаться центральное колесо 16, преодолевая усилие тормоза 18, вместе с диском 20, который своими зубьяA«i начинает пересекать магнитную цепь датчика контроля 21. Это служит командой для вЕСлючения пониженной скорости вращения двигателя 15 подачи, соответствующей величине рабочей подачи.
После включения рабочей подачи или одновременно с этим включением, но не раиьще, включается механиз-,: сцепления 17 и двигатель 4, который вращать щпиндель 2 через кинематическую цепь 3. Усилие сцепления механизма 17 подбирается таким образом, что дифференциал замыкается и червячное колесо 6, солнечное колесо 7, сателлиты 8, центральное колесо 16, водило 9, вал 10 с щестерней // начинают врагцаться с одинаковой угловой скоростью, соответствующей скорости подачи, осуществляя резание.
После окончания обработки одним из известных способов дается команда на быстрый ход вверх, и механизм 17 расцепляете. Пиноль 12 приходит в исходное положение и там останавливается одним из известных способов. Так как вместе с центральным колесом 16 во время рабочей подачи вращается и диск 20, то в исходном положении зубья этого диска относительно датчика контроля 21 могут занять любое положение. Поэтому команду на включение механизма сцепления 17 при касании режущего инструмента детали необходимо подавать после прохождения через магнитную цепь датчика касания 21 по крайней мере двух зубьев, т. е. после поступления от датчика касания 21 не менее двух сигналов.
Как мы видим, в предлагаемом механизме при касании инструментом поверхности летали нет необходимости преодолевать усилие пружины, необходимое для возврата механизма в исходное положение, как это предусмотрено в прототипе. Необходи.мо только преодолеть усилие тормоза 18, которое настраивается равным или немногим более сопротивлению движения кинематической цепи подачи от щестерни // через вал 10, водило 9, сателлиты 8 до центр а льпой щестерни 16.
Так как все эти элементы цепи можно 3/становить на подщипниках качения, то сопротивление вращения этой цепи будет достаточно малым. Это уменьщает усилие,
действующее на режущий инструмент в момент его касания детали. Кроме того, механизм сцепления 17 также для расцепления цепи привода подач при ручном управлении или же при нарезании
резьбы.
При ручном управлении механизм сцеиления выключен и имеется возможность вручную щтурвалом 22 поворачивать шестерню // и двигать пяноль 12. При этом
будет проворачиваться центральное колесо 16 вхолостую через водило 9 и сателлиты (9. Солнечное колесо 7 заторможено в это время червячной передачей ( и 7.
Устройство позволяет механизировать нарезание резьбы. При этом включается двигатель 15, который через кинематическую цепь 14, червяк 5, червячное колесо 6, солнечное колесо 7, сателлиты 8, водило 9,
вал 10, щестерню // приводит в движение ПИНОЛЬ 12. При касании метчика 13, детали /, как и в предыдущем случае, начнет вращаться диск 20 вместе с центральным колесом 16, воздействуя на датчик контроля
21. По команде от этого датчика выключится двигатель 15 и включится двигатель 4, который через кинематическую цепь 3 приведет во вращение щпиндель 2. В отличие от выще рассмотренного случая, механизм сцепления 17 не получит команды на включение, и поэтому метчик 13, вращаясь, начнет самозатягиваться в отверстие, нарезая резьбу. При этом пиноль 2 будет двигаться вслед, вращая щестерию 11,
вал 10, водило 9, сателлиты 8 и центральное колесо 16, так как механизм сцепления 17 выключен.
Таким образом, предлагаемый привод уменьшает нагрузку на режущий инструмент при его касании детали и одновременно расширяет технологические возможности станка.
Формула изобретения
Привод подачи щпинделя станка, в кинематической цепи которого расположены подвижные относительно друг друга элементы и датчик коитроля прикосновения инструмента к обрабатываемой детали, о т л ич а ю щ и и с я тем, что, с целью уменьщеиия усилия -инструмента при касании им детали, привод снабжен тормозом, а подвижные эле.менть выполнены в виде дифференциала с планетарной передачей с цилиндрическими зубчатыми колесами, водило которой связано со шпинделем, солнечное колесо - с двигателем цепи подач, а центральное колесо соединено через муфту о с водилом, взаимодействует с тормозом и жестко связано с датчиком контроля, установленным на одной оси с центральным колесом, диском, Источник информации, принятый во внимание при экспертизе: 1. Авторское свидетельство СССР № 466093, кл. В 23 Q 15/00, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подачи станка | 1973 |
|
SU466093A1 |
| Привод подачи станка | 1978 |
|
SU667380A2 |
| Резьбонарезная головка | 1988 |
|
SU1690979A1 |
| Станок для нарезания конических зубчатых колес с эвольвентными продольными очертаниями зубцов посредством шестернеподобного инструмента методом обкатки | 1948 |
|
SU82667A1 |
| ГОРНЫЙ ОЧИСТНОЙ КОМБАЙН | 1993 |
|
RU2065959C1 |
| Устройство для вибровращательного бурения | 1982 |
|
SU1078018A1 |
| Поводковый патрон | 1989 |
|
SU1712070A1 |
| Полуавтоматическое устройство для обработки тел вращения | 1979 |
|
SU869979A1 |
| Универсальное устройство с однокоординатным числовым программным управлением для обработки сферических и плоских матриц и пуансонов с некруглой в плане боковой конической поверхностью | 1977 |
|
SU659293A1 |
| Силовая головка | 1974 |
|
SU546461A1 |
