1
Изобретение относится к системам автоматического уцрамения и может быть использовано для оценки параметров линейных динамических объектов в режиме их нормальной эксплуатации.
Известны устройства для определения napaNiorpoB лпяейных Д П1амичоских объектов , содержащие настраиваемые модели. Общим недостатком этих устройств является зависимость устойчивости процесса настройки от ширины полосы входного сигнала, наличия в линейно независимых производных при настройке бааьшого числа параметров.
По технической сущности наибатоо близко к изобретению устройство для определения параметров линейных динамических объектов, содержащее две модели, входы которых связаны с соответствующими входами устройства, выходы с соответствующими входами блока формирования ошибки настройки, выходы блока формирования си1 {алов настройки
подключены к настроечным вкодам соответствующих моделей з.
Р1едостаток этого устройства состоит в том, что для обеспечения устойчивости процесса настройки при oднotipeмeннoй настройке большого числа параметров требуется широкополосный си|нал с батьшим числом линейно- независимых производных. Из-за взаимосвязи большого числа параметров в 11 эоцессе настройки процесс затягивается и при узкопапосном входном сигнале может оказат1-.ся ноус-
ТОЙЧИВЫК1.
Целью изобретения является повышение устойчивости настройки устройства.
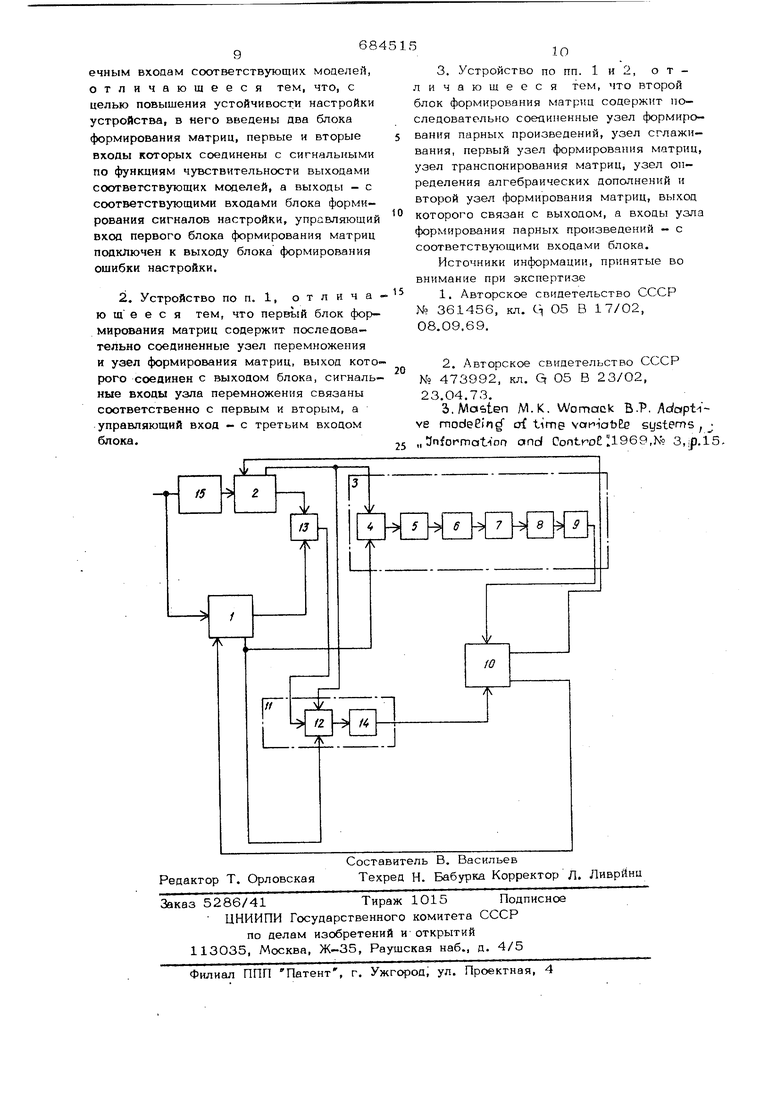
Эта цель достигается тем, что в устройство введены два блока формирования матриц, первые и BToiM.ic иходы которых соединены с .иыми по функциям чувствительности libiходами соответствующих моделей, - с соответствующими входами блок. формирования сигналов настройки, у11;1авляюший вход первого блока форм11 5овамия матриц 30 подключен к выходу блока формирования ошибки настройки. Первый блок формирования матриц содержит последовательно соединенные узел перемножения и узел формирования матриц, выход которого соединен с выхо дом блока, с тональные входы узла пере, множения связаны соответственно с первым и вторым, а управляющий вход - с третьим входом блока. Второй блок формирования матриц содержит последовательно.соединенные узел формирования парных произведений, узел сглаживания, первый узел формирования матриц, узел транспонирования мат риц, узел определения алгебраических до полнений и второй узел формирования ма риц, выход которого связан с выходом, а входы узла формирования парных произведений - с соответствующими входами блока. В связи с этим становится возможны на выходе блока формирования сигналов настройки получить диагональную матрицу сигналов настройки параметров параметрически настраиваемых моделей, т. е исключить взаимосвггзь параметров в про цессе настройки. Кроме того, структура вводимых блоков и связей их элементов обеспечивает независимость процесса настройки большого числа параметров от ширины спектра входного сигнала, величиной которой определяется лишь скорость настройки. Широкополосный входной сигнал обеспечивает высокую ско- рость настройки параметров. Применение двух моделей позволяет упростить конгур самонастройки. На чертеже приведена структурная схема устройства. Устройство содержит модели 1 и 2, блок 3 формирования матриц, узел 4 фор мирования парных произведений, узел сглаживания 5, узел 6 формирования ма риц, узел 7 транспонирования матриц, узел 8 определения алгебраических дополнений, узел 9 формирования матриц, блок 10 формирования сигналов настройки, блок 11 формирования матриц, узел перемножения 12, блок 13 формирования ошибки настройки, узел 14 формирования матриц. Модели 1 (параллельная) и 2(последовательная) представляют собой линейные фильтры, описываемые операторами, причем ,р4...4Ь„р; w,(p) w,(p) (pT пс Р - оператор дифференцирования;а.-р. - пероменныр параметры после- довател} ной модели, принимгж-. шие значения в допустимых прхэделах в зависимости от режима работы схемы; пе)емениые параметры параллельной мопели, изменяющиеся аналогично; F-Cpt - оператор ,тра с постоянными параметрами и ком .,rv- к. Под, afipaMeTpuHecKHKi вхоцом моделей имеется в виду сх.ема упраБ.1слия iiafja - мотрами, жестко соединенная с каждым параметром модели, состоящая из интегратора с бесконечной памятью и управляемого соп ютивления на выходе янтег- laTOpa. Сигнальные по фу)1кциям чувствительности в. ХОДЫ моделей представляют собой точки съема потенциалов в модели без ушрушения процессов, протекающих в схеме. Число выходов по функциям чувствитплЕтНостн постоянно для каждой модели и равно числу настраиваемых па шметров, т. е, п + и k для параллельной и послеаоватсл1)Ной моделей соответственно. Блок 3 формирования матриц (коэффициентов усиления в контуре самонастройки) содержит узел 4 формирования парных произведений, состоящий из набора (k-f-n-t-l ) умножителей. Этот узел (юрми- руст произведения вида Эе бе 9е Зе ; да;. аь; йь. ((,,2,...,k ; f.u,l,..., п) д& ds - функции чувствитель Эьности последовательной и параллельной моделей 1 и 2 соответственно по настраиваемым параметрам. Выходы узла 4 связаны со входами узла сглаживания 5., представляюшег о собой набор линейных фильтров, выходы узла 5 подключены к входам узла 6 формирования матриц, представляющето собой шифратор для формирования в определенном порядке на выходах парных С1 аженных произведений функций чувст вительности. Узол 7 транспонирования M;jTii m iipoacTasviHPT собой инфолто;,. входы iionKjiMMCHbi к шлхоаам уала Ci (ю |Мнроип11и;ч мат)Иц, выходы - ко пхопам yaifi Н оп 1ололеи1 я алгсбраичоскях допо-чионий к элемонггчм мат1)иц, котюрый n|-ioacTai).iSTor собой вычислитель. Нторой узол 1 форМ11ро %ания матриц поа KJiiriMCH входами к выходам y:via 8 опре- деления алгебраических допо-ию.чпй к эле ментам матриц а Р ыходлми - к входам блока 10 фор иповпг(яя ;:iii-i fbio i наст)ой- ки, состояшего из умножителей. Блок 1 1 формирования матрт: содержит узел перемножения 1 Г, представляющий набор п.К i-1 умножителей, который сшиал1, входа.чи подключен к ным г:о функциям чугзствительчск тн выходам мопслей, а уираг -чякшл м вкоаом - к выходу блока i ;3 фю|){И ювания ошибки настройки, входы котоьюго подключены к соответствующим выходам моделей 1 и L. Узел 1-1: (Ьормированяя матриц представляет собой шифратор. lia входы К1оделей 1, 2 поступают входной и выходной сигналы объекта 15. Си|-налы с В1 1ходов моделей вычитаются в блоке 13 (|rapNHipofvTiii H ошибки настройки, сигнал с выхода которого поступает на унраг.ляьлций вход ycvia перемножения 12, где псрелножается с сигналаMii, прогюрциояал,ньгч-и .Ь ч1кц;;ям чувстви те.п.ности каждой из лодо;1ей; из получен ных произг;.едеН,1Й формируг--т н матрица в y-iie 14. Сигналы, : ро;Ю; н;1она;Н)Ные фун кциям чувствител..ности 1оделей, переМножаются в узле 1 формирования пяр- Hbtx произведений, сглажип. в узле сглаживаргля 5, ,из них фор -пшуется матрица уз-лом О. Из алгеб)аических дополнений к алементам транспонированной матрицы, полученной с помощью узла 7 транспонирования мат1)иц, которгле опре- пе/1яются с номоиилк; уз.1а 8 определения алгебраических до11олне)1ий, формируется новая матрица в узле О. ЕЗ блоке 1О формирова1 ия сиЧ1алов н; стройки произво дится перемножение матрицы коэффициентов усиления контура самонастройки на матрицу, формируемую блоком 11, Резул татом умножения является диагональная матрица, алементами которюй являются коэффициенты усиления контуров самонастройки каждого параметра. ГЗёличина коэффициентов определяется шириной спектра вхоцного сигнала. При широкополосном входном сигнале, содержащем бол шое количество линейно независимых сое таь тяющих., обеспечивается высокая око- стройки napasieTfioB зп счет больфициентов усиления контуров сайки. отрим в качестве iipuMe ia рабойства по настройке двух параме т- м случае , Р 4 QO /I W2(P) С(з - постоянный параметр фильтра; HBCTpaifBaeMbie па 1ак1ет|)ы последователь}1ой и парал.чольной моделей соответственно; Зь/° э5/° ЗЕЭuuo , - ошибка настройки. иентный метод настройки параметиз условия минимизации квадрафункционала имеет вид Д г-л-геа.с, а„, Л1--Ь„) Л:- вектор коэ4 фициента усиления контура самонастройки, черта обозначает операцию сглаживания. в (2) в (З), получим / Эе Чй;та/ ° о / °) , /Зё §€ЗЕ. а л , .;Га/ о-аь;а оГ атричной форме -ЛА-Л , - матрица коэ4х{)ициентов усиления в контур е самонастройки. А1 °гг д.ds. ЗЕ. аБ , б Jb
а матрица, сскгтавленная из алгебраичес. ких допсхпнений к элементам матрицы, сформированной в узле 6, будет иметь вид «22 °ia Если матрицу A выбрать ра рице М, го п,олучим закон наст см. уравнение (5) в виде a2a- 42 ja4,«3i2 &sL--o i cfnl I о(л 032 ОI «3 2 11-Зи И a,(aa2- i2 2(l ИЛИ в скалярной форме .taa2ii °ta «2i) где G - определитель Грамм Допустим, что входной сигн вид х sinu3t, оператор объекта Тогда, обозначив сигнал на вы та через X, получим Де I06. L Is pTToM Подставив (10). (11) в (12) ГТт1 ;гт%5 uQ(, , , . bj
2(.с|)(ш2-ьа52)
1
(;;; 5ТсГ
(14)
t /2 (ш С/) УоТгТ,
6845158
Подставив (Il) в (Р), полутим
(fe)jb-cos tgo5 G Т(иУ Тс ХаУ27а
Форм у л а изобретения
1. Устройство для определения параметров линейных динамических объектов, содержащее две модели, входы которых связаны с соответствующими входами устройства, выходы с соответствующими входами блока формирования смиибки настройки, выходы блока формирования сигналов настройки подключены к настро- Реальный входной можно разложить в спектр, В этом случае с-г г - 1 , (16) fr 4(u)j2.c|)() где tp. - частота спектра разложения; (jj - амплитуда состаачяющей спектра разложения. Из в -лражения (16) видно, что rifjii расширении полосы частот входно1О сиг- нала составляющие ф,д увеличиваются, что ведет к увеличению числителя выра- жения (16), т. е. растет скорость настройки параметров. Наоборот, при уменьшении полось частот входного сигнала составляющиеtp г уменьшаются, что ведет к уменьшению G , т. е. настройки падае1. Описанное устройство позЕюляет автоматически изменять скорость настройки параметров модели в зависимости от частотных характеристик входного сигнала, содержания в нем линейно, независимых производных, автоматически прекращать процесс настройки при отсутствии во входном сигнале достаточного числа линейно независимых производных. Это обеспечивает устойчивость процесса независимой настройки параметров модели при любых частотных характеристиках входного сигнала, повысить точность онределения характеристик объекта по мере расширения спектра входного сигнала. Использование изобретения позволит строить автоматические системы идентификации динамических объектов, например летательных аппаратов, используя их при создании адаптивных систем управления летательными аппаратами.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
| Самонастраивающаяся система управления | 1977 |
|
SU650053A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU935875A1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| Устройство для определения требо-ВАНий K пАРАМЕТРАМ ТЕХНичЕСКиХуСТРОйСТВ | 1979 |
|
SU798641A1 |
| Устройство для идентификации линейных динамических объектов | 1977 |
|
SU693342A1 |
| Адаптивный фильтр | 1983 |
|
SU1116537A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОКАНАЛЬНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ | 2009 |
|
RU2395831C1 |
| Способ поиска неисправного блока в непрерывной динамической системе | 2021 |
|
RU2762532C1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
