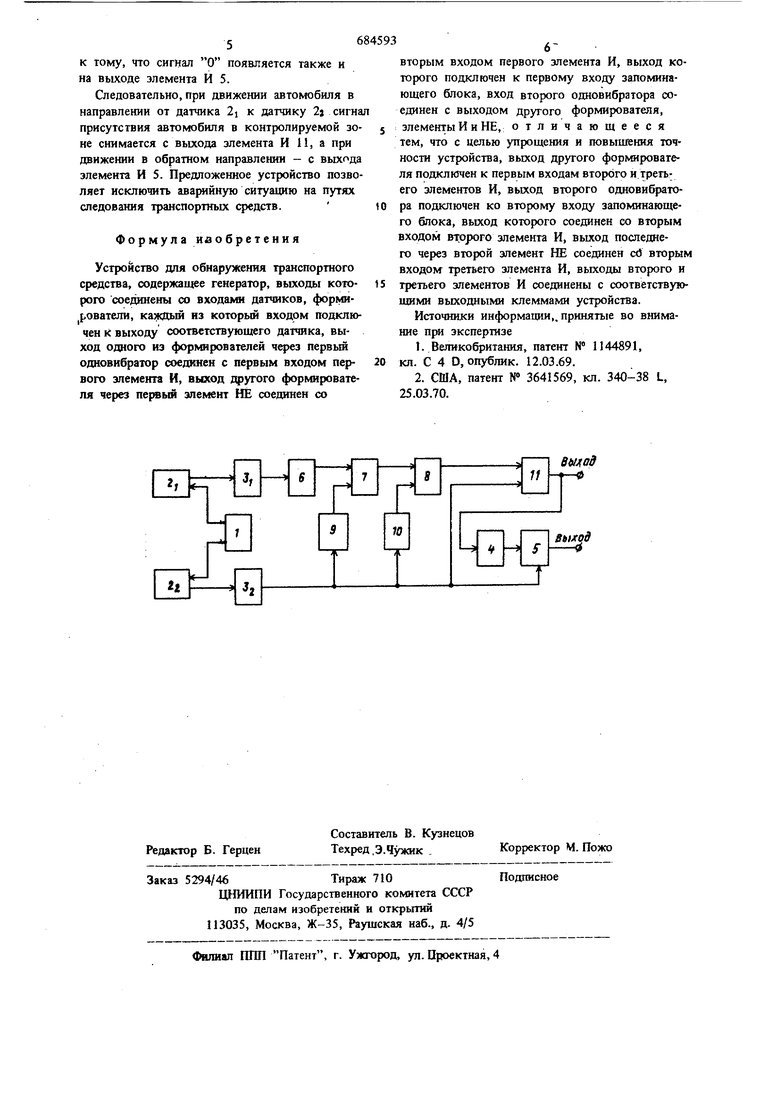
Изобретение относится к устройствам для обнаружения транспортных средств, движуидахся в определенном направлении, и может найти применение в (Э1стемах регулирования доро ным движением и в аппаратуре исспедования транспортных потоков. Известны устройства для обнаружения автомобилей, движущихся в определенном направлении, содержащие два индуктивных детектора с чувствительными элементами в виде шлей фов, очередность поступления сигналов с которых используется для обеспечения информация о направлении движения автомобилей 1. Недостаток этого устройства заключается в невозможности полного определения всего времени присутствия автомобиля в контролируемой зоне. Известно также наиболее близкое к изобретению устройство для обнаружения транспортного средства, содержащее генератор, выходы KOTopoix) соединены с входами датчиков, ф рмирователи, каждый кз которых входом подключен к выходу соответствующего датчика, выход одного нз формирователей через первый одновибратор соединен с первым входом первого элемента И, выход другого формирователя соединен через первый элемент НЕ со вторым входом первого элемента И, выход которого подключен к первому входу запоминающего блока, вход второго одновибратора соединен с выходом другого формирователя, элеме;пы И и НЕ 2. Недостаток данного устройства заключается в том, что в случае остановки одного из автомобилей, движущихся в контролируемой зоне в определенном направлении, н при пересечении затем зтсш зоны другим автомобилем вырабатьшается сигнал сброса соответствующего запоминающего устройства в исходное состояние, в результате чего исчезает сигнал присутствия первого автомобиля, хотя он еще находится в пределах контролируемой зоны. Аналогичный сбой в работе устрюйства будет происходить при обгонке в контролируемой зоне одного автомобиля другим. Кроме того, данное устройство является . достаточно сложным, так как в его состав входит несколько запоминающих устройств, лителей, дифференцирующих элементов, что снижает его надежность. Целью изобретения является упрощение и повышение точности устройства. Поставленная цель достигается тем, что выход другого формирователя подключен к первым входам второго и третьего элементов И, выход второго одновибратора подключен ко второму входу запоминающего блока, выход которого соединен со вторым входом второго элемента И, выход последнего через второй элемент НЕ соединен со вторым входом треть ,его элемента И, выходы второго и третьего элементов И соединены с соответствующими выходными клеммами устройства. На чертеже изображена блок-схема устройства. В состав устройства входят следующие узлы: генератор 1, датчики 2i и 2з, форктрователи 3i и Sj, элемент НЕ 4, элемент И 5, од новнбратор 6, элемент И 7, запомннаюишй блок 8, зленюнт НЕ 9, одновибратор 10, элемент И 11. Датчики 2i и 22 нндзтстйвного типа и питаются от генератора 1. Устройство для обнаружения автомобиля в контролируемой зоне работает следующим образом. В исходном состоянии, т.е. при отсутствии транспортного средства (автомо&1ля) в контролируемой зоне, с выходов форАшрователей 3| и 3 и элементов И 11 и 5 снимается airнал О. При движении автомо етя через контролиру мую эоку в направлении, например от датчика 2i к датчику 2, и пря прохождении им над первым из них на выходе формирователя 3 появляется сигнал 1, который запускает одновнбратор 6. Одиовибратор б вырабатывает короткий импульс, аоступаюи на одни из входов элемента И 7, иа другом входе которого присутствует сигнал 1, до тех пор, пока автомобиль не войдет в зону действия дат чяка 2j. П|Н1 совпадении сигналов на входе элемента И 7 с его выхода снимается сигнал 1, которьш поступает иа вход запоминающего блока 8, в результате чего иа его выходе появляется сигнал I. При прохождении автомоСтля над датчиком 2 на выходе формирователя 3 появляется с нал 1, который поступает на второй вход элемеитГ И 11, и, так как на его первом вхо де уже присутствует сигнал 1, то на выходе элемента И II имеется также сигнал 1. Сигнал 1 на выходе элемента И 11 означает, что в контролируемой зоне, то есть в зоне действия датчика 2а, П1 {сутствует автообиль, движущийся по направлению от датика 2. к датчику Ij. Одновременно с появлением сигнала 1 а выходе формирователя 3, а следовательо, и элемента И 11 на второй вход элемена И 7 с элемента НЕ 9 поступает сигнал О, апрещающий прохождение импульсов с одноибратора 6 на запоминающий блок 8 в течеие всего времени присутствия автомобиля в контролируемой зоне, в результате чего повление других автомобилей в зоне действия атчика 2, движущихся в любом направлении, е сбрасывает информацию о присутствии авомобиля в контролируемой зоне на выходе элемента И 11. При выходе автомобиля из контролируемой зоны на выходе формирователя 3 появляется сигнал О, а следовательно, и иа выходе элемента И 11 - сигнал О, что соответствует выходу автомобиля из контролируемой зоны. Задним фронтом сигнала с формирователя Зг, то есть при выходе автомобиля из контролируемой зоны, запускается одновибратор 10, который формирует кратковременный импульс, устанавливающий запоминающий блок 8 в исходное состояние, что обеспечивает готовность устройства к новому нзмерешно. При йрнсутствир в контролируемой зоне автомобиля, движущегося в направлении от датвдка 2i к датчику 2, на выходе формирователя Зз и элемента И 11 появляется сигнал 1, иа выходе элемента И 5 при этом,- сигнал О, так как сигнал от злемеита И 11 поступает на элемент И 5 через злемент НЕ 4. Если устройство находится в исходном состоянии и в контролируемой зоне появляется автомобиль, движущийся в обратном направлении (от дагшка 2j к датчику 2i), то при прохожденни им над дагшком 2 сигнал 1 с формирователя 3 поступает на элемент И 5, на другом входе которого также пртсутствует сигнал 1, так как на выходе элемента И 11 имеется сигнал О. В случае, если автомобиль войдет в зону действия датчика 2{, оставаясь при этом еще и в контролнруемой зоне (зоне действия датчика 2j), сигнал 1 на выходе элемента И 5 обеспечивается тем, что на одном нз входов элемента И 7 присутствует сигнал О до тех пор, пока автомобиль находится в контролируемой зоне, и, следовательно, сигналы с формирователя 3| не проходят на элемент И 11 и не изменяют состояние элемента И 5. Когда автомобиль, движущийся в направлении от датчика 2 к датчику 2, выходит из контролируемой зоны, на выходе формирователя 32 появляется сигнал О, что приводит к тому, что сигнал О появляется также и на выходе элемента И 5. Следовательно, при движении автомобиля в направлении от датчика 2j к датчику 2: сигна присутствия автомобиля в контролируемой зо не снимается с выхода элемента И 11, а при движении в обратном направлении - с выхода элемента И 5. Предложенное устройство поэво ляет исключить аварийную ситуацию на путях следования транспортных средств. Формула иаобретення Устройство для обнаружения транспортного средства, содержащее генератор, выходы которого соединены со входакга датчиков, формирователи, каждый из который входом подклю чен к выходу соответствующего датчика, выход одного из формирователей первьш одновибратор соединен с первым входом первого элемента И, выход фугого формирователя через nepsbdi элемент НЕ соединен со вторым входом первого элемента И, выход которого подключен к первому входу запоминающего блока, вход второго одновибратора соединен с выходом другого формирователя, элементы И и НЕ, отличающееся тем, что с целью упрощения и повышения точности устройства, выход другого формирователя подключен к первым входам второго н.третьего элементов И, выход второго одновибратора подключен ко второму входу запоминающего блока, выход которого соединен со вторым входом второго элемента И, выход последнего через второй элемент НЕ соединен cd вторым входом третьего элемента И, выходы второго и третьего элементов И соединены с соответствующими выходными клеммами устройства. Источники информащ1И,. принятые во внимание прк экспертизе 1.Великобритания, патент № 1144891, кл. С 4 О, . 12.03.69. 2.США, патент N 3641569, кл. 340-38 L, 25.03.70.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров транспортных потоков | 1984 |
|
SU1226511A1 |
| Устройство для подсчета автомобилей | 1978 |
|
SU725075A1 |
| Устройство для подсчета проходящих транспортных средств | 1983 |
|
SU1104564A1 |
| Магнитометрический детектор транспорта | 1987 |
|
SU1490681A1 |
| СПОСОБ КОНТРОЛЯ ВЕЛИЧИНЫ ДОПУСТИМОГО СБЛИЖЕНИЯ ДВУХ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033359C1 |
| Устройство для определения вида транспорта | 1976 |
|
SU639007A1 |
| Устройство для контроля одиночных дефектов движущейся пленки | 1985 |
|
SU1259168A1 |
| Устройство для учета транспортных средств | 1976 |
|
SU605230A1 |
| Дискретный датчик перемещения | 1979 |
|
SU808940A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
Зшад
Bkixod
