1
Изобретение относится к области регулируемых элехтродвигателей постоянного тока. Электропривод предназначен для использования в системах синхронизации частоты враьчения.
Известен синхронизированный электродвигатель постоянного тока 1. Он содержит коммутатор, через который на двигатель подается питание, подключенный к коммутатору блок синхронизации, на один из входов которого подается синхронизирующая частота, а к другому подключен частотный датчик скорости вращения, связаный с валом двигателя.
Сигнал датчика скорости имеет частоту, пропорциональную скорости вращения. С помощью блока синхронизции, управляющего через коммутатор двигателем, обеспечивается равенство частоты сигнала датчика скорости и синхронизирующей частоты путем фазовой автоподстройки. Таким образом обеспечивается пропорциональнос скорости вращения синхронизирующей частоте, т.е. осуществляется синхронизация .
Однако при низких значениях синхронизирующей частоты, т.е. на.низких скоростях, мала частота поступления информации о фазовом положении ротора, что ухудшает качество регулирования и приводит к срыву фазовой автоподстройки частоты (сигнала датчика). Это сужает диапазон регулирования.
Таким образом, недостатками известного устройства являются узкий
0 диапазон синхронизации и низкое качество регулирования на малых скоростях.
Наиболее близким к изобретению
5 техническим решением является бесконтактный электродвигатель постоянного тока с синхронной скоростью вращения 2. Он содержит т-фазный коммутатор, подключенный к нему блок
0 синхронизации, к которому подсоединен датчик скорости вращения типа обращенного бесконтактного сельсина, подк.пюченного к т-фазному генератору опорной частоты и соединенного с
5 коммутатором через дешифраторы, каждый из которых двумя входами подк.гпочен к выходу датчика, а другими входами - к соответствующей фазе генератора опорной частоты.
0
Частота f выходного сигнала датчика скорости определяется выраже™ ни ем
f fo F , (1) где fj, опорная частота,
F - частота вращения электрсдвигателя.
Знак перед величиной F определяется направлением вращения. Выходной сигнал датчика скорости несет информацию о направлении скорости вращения и о фазовом положении ротора, С помощью блока синхронизации обеспечивается фазовая автоподстройка частоты вращения тгос, что частота выходного сигнала датчика скорости и синхронизирукидая частота f равны т е
f f(, , FO ± F f о (2)
Таким образом частота вращения электродвигателя определяется выражением
F /fc - fo/ (3)
Как видно из выражения (3), нестабильность опорной частоты вызывает нестабильность частоты вращения, что нарушает однозначность связи величины F с синхронизирующей частотой, т приводит к ошибке синхронизации.
Синхронизация скорости такого электродвигателя осуществляется с ошибкой, связанной с нестабильностью генератора опорной частоты.
Целью изобратения является повышение точности синхроннаадии путем исключения ошибки синхронизации, связанной с нестабильностью генерато ра опорной частоты.
Поставленная цель достигается тем что 3 синхронизированньгй электропривод постоянного тока, содержащий силовой блок, к управляющему входу которого подключен.блок синхронизации, датчик частоты вращения с выходной характеристикой вида f f ± kF,выход которого подключен к одному из входов блока синхронизации, т-фазный генератор опорной частоты, подключенный к датчику частоты вращения, и устройство задания частоты вращения, введен сумматор частот, один вход к© торого соединен с выходом генератора опорной частоты, другой - с устройством задания частоты вращения, а выход подключен к блоку синхронизации.
Благодаря введению и указанному включению сумматора частот исключается влияние нестабильности.генератора опорной частоты на частоту вращения двигателя. При этом блок синхронизации работает на частоте, близкой к опорной частоте, что oeecne sHsaeT высокую частоту поступления информации о фазовом положении ротора при всех частотах вращения, что, в свою очередь, обеспечивает ишрокий диапа зон синхронизации и высс5кое качество регулирования.
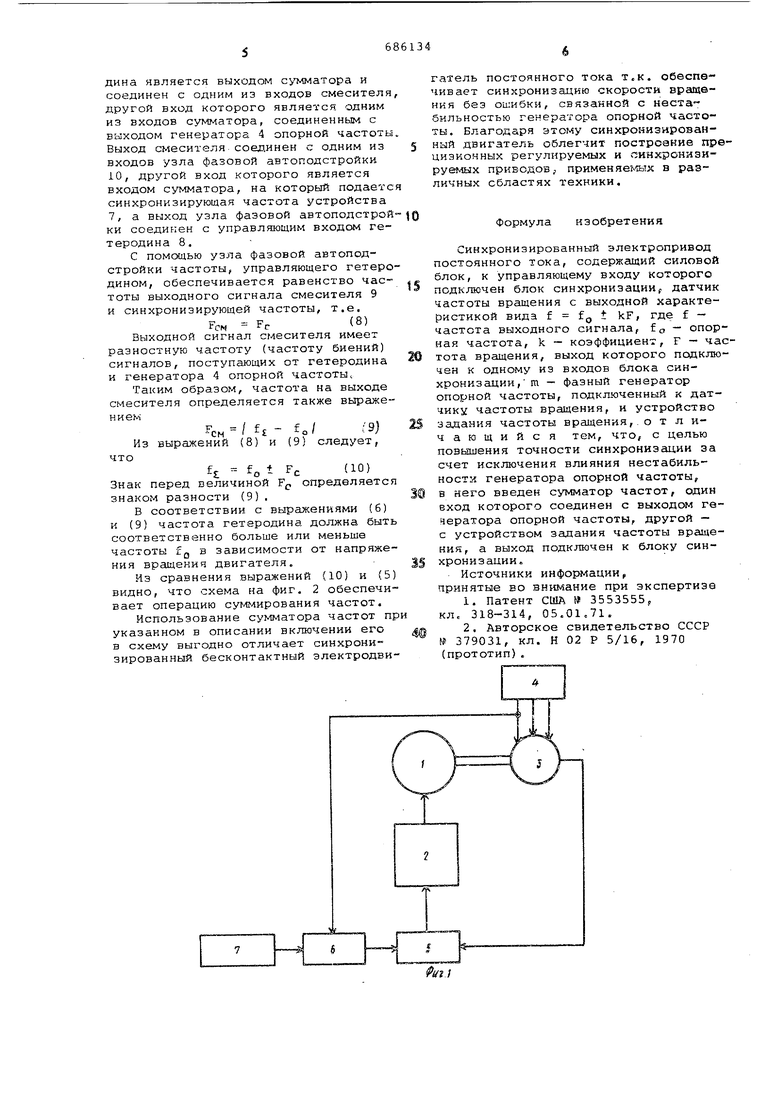
На предстг1вленс. блок-схема предлагаемого электропривода; на фиг. 2 показан блок cyivtMHpoBaHHH..
Электропривод содержит злектродвих-атель 1р силовой блок 2, датчик 3 частоты вра1а,екия, гп-фаэный генератор 4 опорной частоты, блок синхронизации 5, сумматор частот 6 и устройство 7 задания частоты вра 11ения.
С обмоткой электродвигателя соединены выходы силового блока, с валом электродвигателя связан датчик частоты вращения, к входу которого подключен т фазный генератор опорной частоты. Выход блока синхронизации 5 соединен с силовым блоком 2, один из входов блока синхронизации соединен с выходом датчика 3, другой с выходом сумматора частот 6, один из входов которого соединен с дом генератора 4 опорной частоты, а на другой вход поступает синхронизирующая частота с устройства 7 задания частоты вращения.
Схема работает следующим образом.
Сигналы с т-фаэного генератора 4 опорной частоты поступают на входы датчика 3 частоты вращения. Сигнал датчика частоты вралдения, поступающи на один из входов блока синхронизаци 5, имеет частоту
f fo ± F (4) Знак перед величиной F определяется направлением вра-щения.
На входы cyT.CvsaTopa частот 6 посг,уг1ают сигналы от генератора 4 и синхронизирующая частота с устройства 7 задания частоты вращения. На выходе сумматора частот сигнал имеет частоту f J определяемую выражением
(5)
f fn ±
с ,
где FP - синхронизирующая частота
устройства задания частоты вращения,
Знак перед величиной F определяется направлением вращения,
С помощью блока синхронизации 5, управляющего через силовой блок 2 электродвигателем 1, обеспечивается фазовая автоподстройка частоты вращения так, что поддерживается равенств частот входных сиг-налов блока синхронизации, т,е,
f 4 F fo± FP (6)
Опорная частота входит в качестве слагаемого в обе части равенства (6) Таким образом, нестабильность опорной частоты никак не нарушает равенство (б) и не вызывает ошибки синхронизации. Частота вращения определяется только синхронизирующей частотой
(7;
F Fe
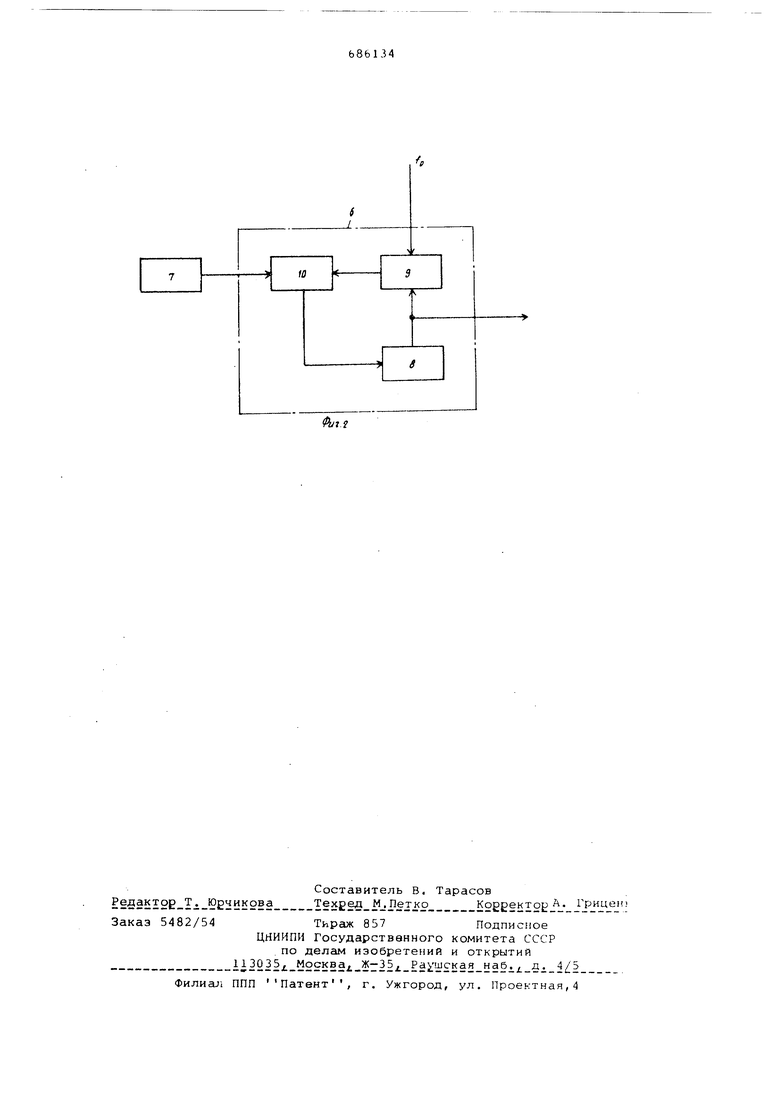
Сумматор частот б может быть построен, например, по схеме (фиг,2), содержащей управляеьслй гетеродин 8,, смеситель частот 9, узел фазозоГ автоподстройки частоты 10. Выход гетеродина является выходом сумматора и соединен с одним из входов смесителя другой вход которого является одним из входов сумматора, соединенным с выходом генератора 4 опорной частоты Выход смесителя соединен с одним из входов узла фазовой автоподстройки 10, другой вход которого является входом сумматора, на который подаетс синхронизирующая частота устройства 7, а выход узла фазовой автоподстрой ки соединен с управляющим входом гетеродина 8, С помощью узла фазовой автоподстройки частоты, управляющего гетеро дином, обеспечивается равенство частоты выходного сигнала смесителя 9 и синхронизирующей частоты, т.е. FCM FC (8) Выходной сигнал смесителя имеет разностную частоту (частоту биений) сигналов, поступающих от гетеродина и генератора 4 опорной частотыс Таким образом, частота на выходе смесителя определяется также выражениемFCH-I 1- fo/ (9) Из выражений (8) и (9} следует, f fo t FC (10) Знак перед величиной Fp определяется знаком разности (9). В соответствии с выражениями (6) и (9) частота гетеродина должна быть соответственно больше или меньше частоты f в зависимости от напряжения враицения двигателя „ Из сравнения выражений (10) и (5 видно, что схема на фиг. 2 обеспечивает операцию cy /I lиpoвaния частот. Использование сумматора частот пр указанном в описании включении его в схему выгодно отличает синхронизированный бесконтактный электродви гатель постоянного тока т.к. обеспечивает синхронизацию скорости аргицвния без ошибки, связанной с нвста бильностью генератора опорной частоты. Благодаря этому синхронизированный двигатель облегчит построание прецизионных регулируемых и синхронизируемых приводов, применяе-л-ых в различных областях техники. Формула изобретения Синхронизированный электропривод постоянного тока, содержащий силовой блок, к управляющему входу которого подключен блок синхронизации, датчик частоты вращения с выходной характеристикой вида f f(j t kF, где f - частота выходного сигнала, fo - опорная частота, k - коэффициент, F - частота вращения, выход которого подключен к одному из входов блока синхронизации, m - фазный генератор опорной частоты, подключенный к датчику частоты вращения, и устройство задания частоты вращения,, отличающийся тем, что, с целью повышения точности синхронизации за счет исключения влияния нестабильности генератора опорной частоты, в него введен сумматор частот, один вход которого соединен с выходе геяератора опорной частоты, другой - с устройством задания частоты вращения, а выход подключен к блоку синхронизации. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3553555, кл. 318-314, 05.01,71. 2.Авторское свидетельство СССР № 379031, кл. Н 02 Р 5/16, 1970 (прототип).
Фигг
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1980 |
|
SU928575A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Электропривод постоянного тока | 1978 |
|
SU771834A1 |
| Электропривод постоянного тока | 1981 |
|
SU995247A1 |
| Электропривод постоянного тока | 1981 |
|
SU978306A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |