(54) КОПИРУЮЩИЙ МАНИПУЛЯТОР
Е
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод для сустава задающего органа копирующего манипулятора | 1974 |
|
SU511201A1 |
| Система управления манипулятором | 1977 |
|
SU642671A1 |
| Манипулятор | 1985 |
|
SU1278201A1 |
| Устройство для компенсации статических моментов | 1980 |
|
SU903801A1 |
| Задающий орган манипулятора | 1983 |
|
SU1088928A1 |
| Система управления копирующим манипулятором | 1977 |
|
SU614939A1 |
| Устройство для компенсации статических моментов манипулятора | 1979 |
|
SU881654A1 |
| Обратимая следящая система | 1980 |
|
SU903800A1 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
Изобретение относится к манипуляторостроению и может быть использовано в копирующих манипуляторах с активным отражением усилий.
Известен копирующий манипулятор, содержащий исполнительный и задающий счрганы,выполненные в виде шарнирно сочлененных звеньев и систему управления, включающую тракт отражения усилия 1.
Цель изобретения - повысить точность и упростить систему управление.
Это достигается тем, что в шарнирах вещающего органа установлены компенсаторы статических моментов неуравновешенности задающего и исполнительного органов. Каждый компенсатор мажет &з1ть выполнен в виде штанги с установленным на ней грузом.
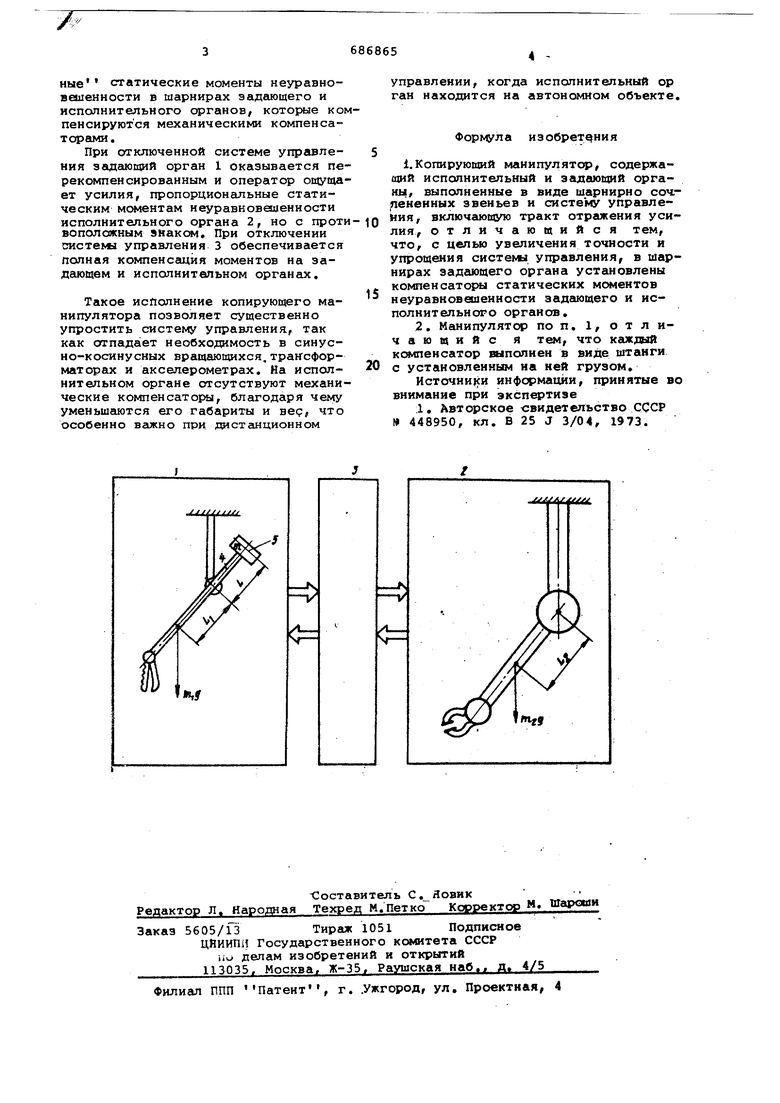
На чертеже представлена схема копирующего манипулятора.
Манипулятор содержит задающий орган 1 и кинематически ему подобный исполнительный орган 2, выполненные в виде шарнирно сочлененных звеньев, а также систему управления 3. В шарнирах задающего органа установлены механические компенсатс ы, выпелненные в виде штанги 4 с закрепленным на ней грузом 5.
Компенсация статических моментов неуравноволенности достигается тем, что массу (Т) груза 5 выбирают по следующему соотнсшению
,L,-f
L
длина штанги 4;
где
0
т и го,- неуравновешенные массы в шарнире соответственно задающего и исполнительного органов;
5
L, и L, расстояния от оси шарнира до центров неуравновешенных масс (точки приложения весов mjg и mjg) .
0 коэффициент масштабип рования по моменту. Манипулятор работает следующим образом. По тракту отражения усилий системы управления на приводы задаю5го органа передаются моменты нагруз.ки на исполнительном органе с коэффициентом п масштабирования по моменту. Кроме того, по тракту отражения усилий передаются также вредстатические моменты неуравновешенности в шарнирах задающего и исполнительного органов, которые ко пенсируются механическими компенсаторами. При отключенной системе упргшления задающий орган 1 оказывается пе рекомпенсированным и оператор ощуща ет усилия, пропорциональные статическим мс 1ентам неуравновещенности исполнительного органа 2, но с прот воположным 9йаком, При отключении системл управления 3 обеспечивается полная компенсация моментов на задеиощем и исполнительном органах. Такое исполнение копирующего манипулятора позволяет существенно упростить систему управления, так как агпада ет необходимость в синусно-косинусных вращающихся, трансформаторах и акселерометрах. На исполнительном органе отсутствуют механи ческие компенсаторы, благодаря чему уменьшаются его габариты и вес, что особенно важно ПРИ дистанционном управлении, когда исполнительный ор ган находится на автономном объекте. Формула изобретения 1,Копирующий манипулятор, содержа(ций исполнительный и задающий органы, выполненные в виде шарнирно соч;аененных звеньев и систему управления, включгиощую тракт отражения усилия, отличающийся тем, что, с целью увеличения точности и упрощения систекы управления, в шарнирах задающего органа установлены компенсаторы статических моментов неуравновешенности задающего и исполнительного органов. 2. Манипулятор по п. 1, отличаюцийс я тем, что кажлиЯ кс шенсатор выполнен в виде штанги с установленным на ней грузом. Источни|(и информации, принятые во внимание при экспертизе .1. Авторское свидетельство СССР 448950, кл. В 25 J 3/04, 1973.
m,j
