54) ПРИВОД ДЛЯ СУСТАВА ЗАДАЮЩЕГО ОРГАНА КОПИРУЮЩЕГО МАНИПУЛЯТОРА
1
ИзоЬретение относится к копирующим манипуляторам и может быть использовано в системах ав1-оматического регулирования,, имеющих главную обратную связь по сило вому воздействию со стороны объекта регу- лирования.
Известны приводы для суставов задаю-щего органа копирующего манипулятора, содержащие последовательно соединенные датчик нагрузки, первый сумматор, второй сумматор, усилитель-преобразователь, электродвигатель, необратимый редуктор и упругий эле.)ент, параллельную упругому элементу подсоединен датчик усилия оператора, выход которого соединен со вторым входом первого сумматооа, а к .выходу электродвигателя подключен датчик скорости.
Однако в известных устройствах существуют ошибки в ощущениях отраженного усилия оператора и снижение коэффициента передачи привода, вызванные нелинейностью характеристики необратимого редуктора, обусловленной различием в потерях на трение в зацеплении самотормозящегося редуктора, при движении в тяговом ре игк;с и режиме отторк а :сивания.
Цель изобретения - ул чиигь д)ка)и- ческие характеристики привода.
Это достигается , что привод содержит компенсатор тренпя необратик: ого редуктора, соответствующие входы которого соединены с выходами первого с- -м тора, датчика скорости, датчика ус ..иш оператора i датчика нагрузки, а Е гход подключен V- вторехоу входу второго cyMNia- тора.
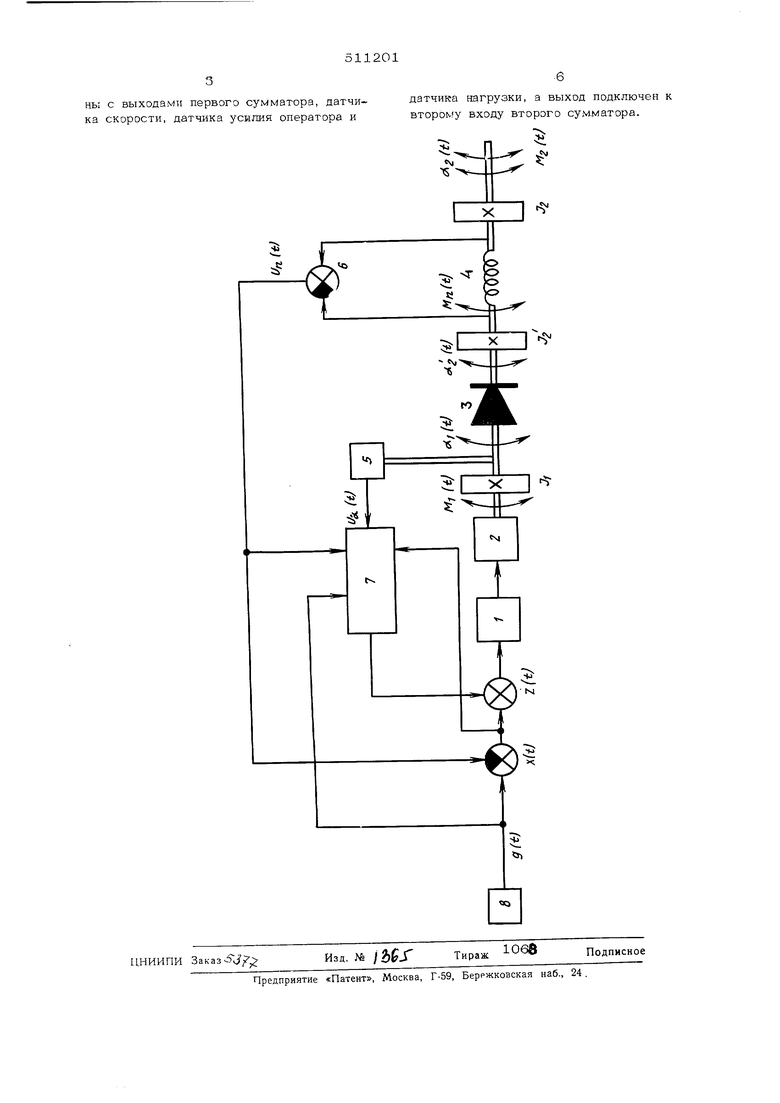
На чертеже показаг-гй фу ккиионалъп схема привода, которыГ содермсит .ли- тель-преобразователь 1, электрэдвпгатель 2, необратимы ред ктор 3 с динамическим передаточнт гм отноиюнием V- ;
если L/Ittii)- П 0
//1
:)/ ,
Lа, (r4fin;tj-j2 2
если
где О УГОЛ поворота вала операто f /j- MONJGHT, развиваемый двига телем; oмeкт, развиваемый опера момент на упругок эле.ент - момент икерцик масс, свЕз ных с выходным валом редуктора:j момент инери.ии масс, связанных с валом оператора; J - момект инерцик масс, связанных с двигателем; o-ff- сигнал, пропорциональный усилию, развиваемому нагруз кой; Z( сигнал управления двигателе упругий элемент 4, датчик 5 скорости, датчик 6 усилия оператора, коч пенсатор трения необратимого редуктора 7 с коэффициентом передачи f : if, если U;j,( toyiu, xli)):0 ll2 cjju U(i) MU- .(t))0 0 есяи U(i) 0 и lx(i)Ul 0 ) где ,-() ; -/У„ДКО К - коэффициент усиления прямого тракта системы; i - передаточное отношение редуктор 1 - к. п, д. тягового режима редукто ра; f - коэффициект оттормаживания редуктэра;h.(j;t- сигнал датчика скорости; ( сигнал датчика момента; X(tj - рассогласование cиcтe rы; датчик 8 нагрузки. Привод работает следующим образом. Ка исполнительный орган копирующего манипулятора воздействует постоянное усилие (подвешен груз). При этом предполагается, что величина этого усилия позволяет оператору удержи вать систему неподвижно. Сигнал с датчика 8 нагрузки поступает на компенсатор трения необратимого редуктора 7, коэффициент передачи которого равен нулю. В канапе ошибки появляется сигнал рассогласования XfijfO, так как начальный момент времени Xf-tj g(t)-L/ (t) где UfjCi)0 . Электродвигатель 2 начинает отрабатывать рассогласование, закручивая упругий элемент 4, а измеритель его деформации - датчик 6 усилия оператора выдает сигнал 11(4)0 Так как закручивание упругого элемента происходит в тяговом режиме, то вь полня- ется условие X t;-Uti{i 0i U(ty-t О и при A( через компенсатор трения необратимого редуктора 7 подается сигнал управления по входному воздействию. Величина этого управления компенсирует потери на ,в зацеплении самотор1 ;оэяшегрсЯ реду ора при движении в тяговом режиме. Если в результате перерегу.пирования величина Ait сменит знак, то наступает режим оттормаживания, выполняется условие )U;b (t.) 0 , и компенсатор трения необратимого редуктора 7 переключается, подавая сигнал управления, компенсируюший потери на трение в зацеплении при движении в режиме оттормаживания. Если для данной реализации выбрана зона нечувствительности величиной в , то работа привода начинается только тогда, когда 1/, (;} . Выбор величины и будет определять зону нечувствительности системы и ошибку оператора. Как только рассогласование будет отработано и привод остановится, выполнится условие U-(t.-0и ) и управление по входному воздействию будет выключено. С:-: шл управления электродвигателем 2 6j :ет рав(;н 2(:):-;/ ;:)4 . Если вь бранэ рав11Ь..) О, то и 2;Ь)0 Электродвигатель 2 привода в равновесном состоянии будет потреблять энергию, определяе ;yю заданной величиной , и разгружен при помощи самоторможения редуктора. В режикшх, когда ошибка системы равна нулю, а система движется, режим работы компенсатора трения необратимого редуктора 7 определяется знаком сигнала датчика 5 скорости ii датчика 6 усилия оператора, Формула изобретения Привод для сустава задающего органа копирующего манипулятора, содерхсвщий последовательно соединенные датчик нагрузки, первый сумматор, второй сумматор, усилитель-преобразоватеш, электродвигатель, необратимый редуктор и упругий элемент, параллельно упругому элементу подсоединен датчик усилия оператора, выход которого соединен со вторым входам первого сумматора, а к выходу электродвигателя подключен датчик скорости, отличающийся тем, что, с целью улучи ения динамических характеристик привода, он содержит компенсатор трения необратимого редуктора, соответствующие входы которого соедине
| название | год | авторы | номер документа |
|---|---|---|---|
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Дистанционный копирующий манипулятор | 1976 |
|
SU590136A1 |
| Обратимая следящая система | 1980 |
|
SU903800A1 |
| Устройство для управления суставом очувствленного копирующего манипулятора | 1974 |
|
SU548413A1 |
| Тренажер буровика | 1982 |
|
SU1062760A1 |