I
Изобретение относится к области манипуляторостроения и может быть использовано при создании универсалJL, ных промышленных или специализированных манипуляторов.
Известна система управления манипуляторами, содержащая кинематически подобные Зсщающие и исполнительные устройства с индивидуальныю приводами звеньев и систему управления каждым приводом. Такая система имеет громоздкое задсшщее устройство, требующее соответствующего пространства для своих перемещений, что ограничивает область применения этой системы l .
Наиболее близким техническим решением к данному изобретению является система 2, содержащая датчики усилий задающего органа и последовательно соединенные блок астатического управления, блок следящих приводов и датчики усилий исполнительного органа.
Эта система позволяет управлять перемещением исполнительного органа в пространстве с помощью малых перемещений задающего органа, т.е. обеспечивает малую рабочую зону оператора. Направление перемещения исполнительного орхана соответствует направлению перемещения задающего органа, а скорость пропорциональна величине перемещения задающего органа. Однако, в этой системе невозможно ощущение оператором на задающем органе усилий, действующих на исполнительном органе, что снижает эффективность работы оператора.
Целью изобретения является расширение области применения системы.
Это достигается тем, что предлагаемая система содержит последовательно соединенные вычислительный блок
Б и сумматор, входы которого подключены к соответствующим выходам датчиков усилий задающего органа, а выходы - к соответствующим входам блока астатическох о управления, выходы
0 датчиков усилий исполнительного органа соединены с соответствующими входами вычислительного блока,
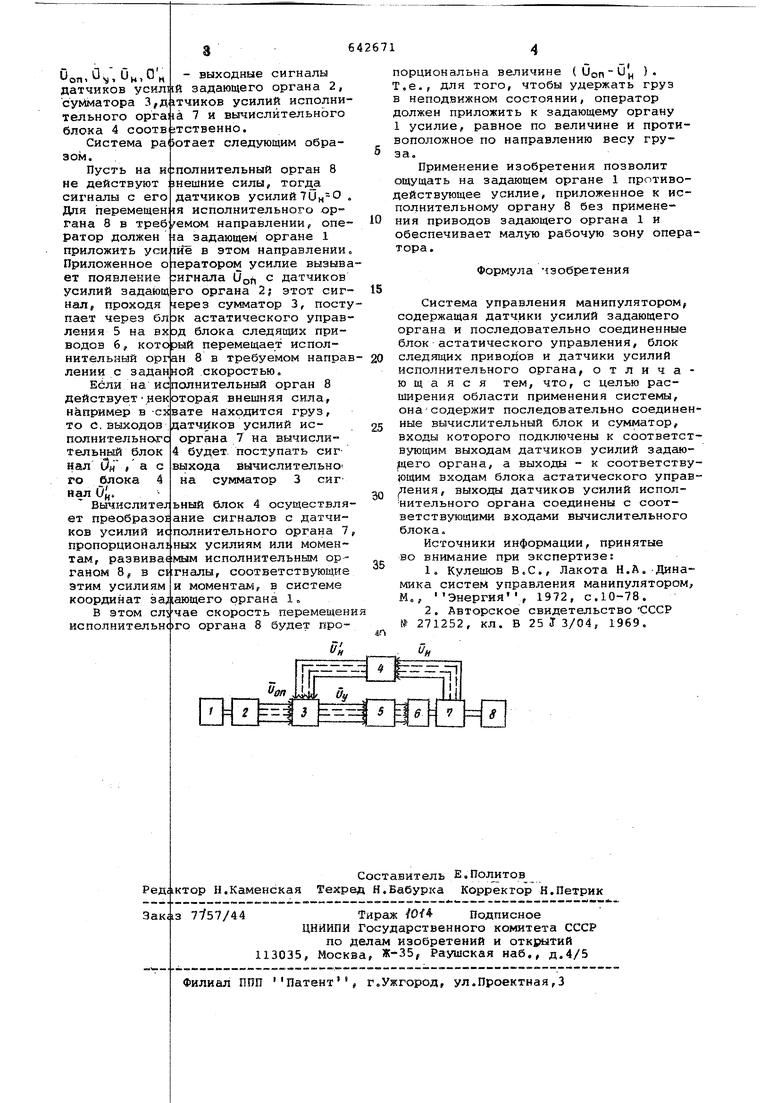
На чертеже представлена блок-схема предлагаемой системы, где 1 - задаю5щий орган, 2 - датчики усилий задающего органа,3 - суьматор, 4 - вычислительный блок, 5 - блок астатического управления, 6 - блок следящих приводов, 7 - датчики усилий исполнитель0ного органа,. 8 исполнительный орган.
иоп,йн,а„
- выходные сигналы
й задающего органа 2,
датчиков усил сумматора 3
,д1тчиков усилий исполни7 и вычислительного
органа тельного блока 4 соотв итственно.
Система
следующим обрара(ютает зом.
;полнительный орган 8
Пусть на и не действуют шешние силы, тогда датчиков усилий 7ин сигналы с его Для перемещен 1Я исполнительного орГана 8 в треб /емом направлении, опега задающем органе 1 ратор должен усилие в этом направлении приложить Приложенное отератором усилие вызыв сигнала Upn датчиков ет появлекне эго органа 2; этот сигусилий задают ерез сумматор 3, постНал, проходя блрк астатического управпает через ления 5 на блока следящих привхэдводов 6, который
перемещает испол8 в требуемом напранительный
орган заданной
скоростью лении с
исЬолнительный орган 8
Если на действуетнек оторая внешняя сила, например в
охвате находится груз, датчиков усилий исто с. выходов
органа 7 на вычисли™ полнительнозгс 4 будет, поступать сигТельный блок нал Он /ас выхода вычислительно го блока 4 на сумматор 3 сигнал О/,.
блок 4 осуществляВычислите ьный ет преобразо ание сигналов с датчиис|полнительного органа 7 ков усилий пропорциональных усилиям или момен исполнительньш ортам, paзвивael Gaм гано-м 8 f в , соответствующие
С5;гналы, и моментам, в системе этим усилиям
органа 1
задающего координат
В этом СЛ5
чае скорость перемещен го органа 8 будет происполнительн
порциональна величине ( ). Т.е., для того, чтобы удержать груз в неподвижном состоянии, оператор должен приложить к задающему органу 1 усилие, равное по величине и противоположное по направлению весу груза.
Применение изобретения позволит ощущать на задающем органе 1 противодействующее усилие, приложенное к исполнительному органу 8 без применения приводов задающего органа 1 и обеспечивает малую рабочую зону оператора.
Формула изобретения
Система управления манипулятором содержащая датчики усилий задающего органа и последовательно соединенные блок астатического управления, блок следящих приводов и датчики усилий исполнительного органа, отличающаяся тем, что, с целью расширения области применения системы, онаСодержит последовательно соединенные вычислительный блок и сумматор, входы которого подключены к соответствующим выходам датчиков усилий задаюpiero органа, а выходы - к соответству(ощим входам блока астатического управ ения, выходы датчиков усилий исполнительного органа соединены с соответствующими входами вычислительного блока«
Источники информации, принятые во внимание при экспертизе г
1.Кулешов B.C., Дакота Н.А. Динамика систем управления манипулятором, М,, Энергия, 1972, с.10-78.
2.Авторское свидетельство -СССР № 271252, кл. В 25J3/04, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1978 |
|
SU729545A1 |
| Система управления манипулятором | 1978 |
|
SU723501A1 |
| Устройство для управления манипулятором | 1981 |
|
SU960723A1 |
| Система управления манипулятором | 1978 |
|
SU805245A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Устройство для управления астатическим манипулятором | 1982 |
|
SU1037206A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
