(54) СИСТЕМА УПРАВЛЕНИЯ 1 ОПИРУ10ЩИМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1978 |
|
SU729545A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления манипулятором | 1987 |
|
SU1565679A1 |
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU842700A1 |
| Устройство для управления копирующим манипулятором | 1984 |
|
SU1234807A1 |
| Система управления манипулятором | 1978 |
|
SU805245A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
Изобретение относится к манапупяторостроению и может быть использовано при создании систем управления когшрующими манипуляторами.
Известная система управления копиру- ющим манипулятором, содержащая датчик положения датчик нагрузки и привод задающего органа, датчик положения, датчик нагрузки и привод исполнительного органа, и усилители, не обеспечивает фик- сацин звеньев задающего и исполнительгного органов p.J. Наиболее близким к .изобретению техническим решением явля втся система, содержащая последовательг но соединенные датчик, момента задающего органа, первый сумматор и npiBoa за-) дающего органа, соединенный через датчвк момента задающего органа с датчи ком положения задающего органа| выход которого через второй сумматор подкгночен ко входу привода исполнительного ор гана, соединенного через датчик момента исполнительного органа с датчиком положения исполнительного органа, выход которого подключен ко второму входу второго сумматора, а выход датчика момента исполнительного органа соединен со вторым входом первого сумматора f2j. Однако в этой системе отсутствует возможность фиксирования в определенном П(ложении кинематических звеньев исполнительного и задающего органов, чем выаь вается неудобство работы оператора с такой системой.
Цепью изобретения является повышение удобства работы оператора, т.е. улучшиние эксплуатационных характеристик. Сущность изобретения заключается в том, «ггО система содержит коммутатор и запом Нающее устройство, причем выход датчика положе1тя задающего органа соединен не посредственно с третьим входом первого сумматора и через последовательно совдяйенные коммутатор и поминающее уст ройство с четвертым входом первого сумматора,
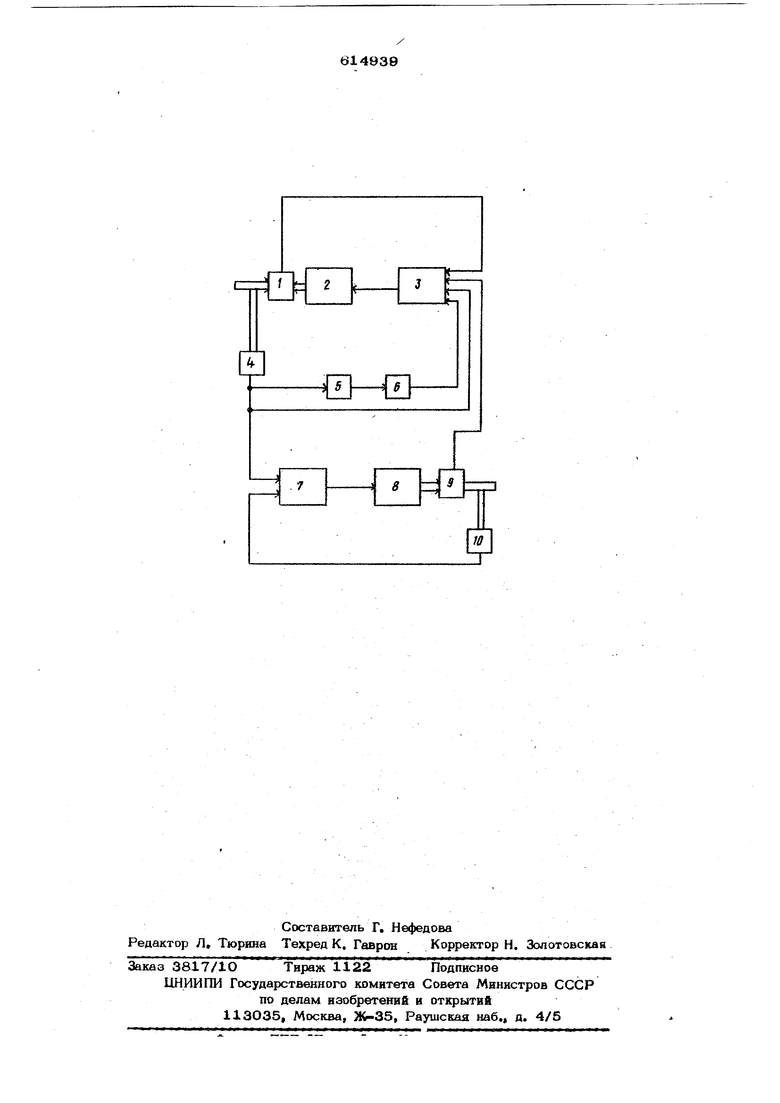
На чертеже показана блоп-схема опви сываемой системы,,
.Она содержит датчик 1 момента задаюшв- го органа, привод 2 задающего органа, первый сумматор 3, датчик 4 положения оадаюшего органа, коммутатор 5, эапомичнающее устройство 6, второй сумматор 7t привод 8 исполнительного органа, датчик is момента исполнительного органа и датн чик 10 положения исполнительного органа В рабочем режиме оператор прикладь Ьает момент к валу замкнутой через да-рчик 1 по моменту систем задающего органа, и вал приходит в движение. Замкну,тая через датчик 10 по положению сиетема исполнительного органа отрабать5вает перемещения вала задающего органа, На второй вход сумматора 3 поступает сигнал с датчика 9 момента исполнитель ного органа. Поскольку система на зада ощем органе замк1:ута отрицательной об ратной связью по моменту, на валу задаЮ щего органа боспроизводится момент, развиваемый исполнительным органом. В этом режиме коммутатор S -замкнут, на запоминающее устройство 6 яегтрерывно подается сигнал с датчика 4, Запоминающее устройство 6 может быть В1)1полнёно, например, в виде опера,дио1шог-о усилителя с емкостями на входе и Б I ::-зат яой связи На ВЛ.ОДЫ су 4матора 3 подаются сигна лы С qai4HKa 4 и с аапшлинающего уст ройства 6 одинаковые по величине, но с протквоположнум знаком В реашме фиксирования в определенном положении кинематических звеньев аада Ющего и исполнительного органов коммутатор 5 размыкается, с запоминающего устройства 6 на вход сумматор 3 поступает достоянный сигнал, пропорциональный угловой координате задающего органа, име)юшей место в момент размыкания комму татор 5, Поскольку система на -задающем органе охвачена через датчик 4 отрицательной обратной связью по положению, вал задающего органа и, следовательно, вал исполнительного органа фиксируются в определенном положении. Формула изобретег ия Система управления копирующим ман пулятором, содержащая последовательно соединенные датчик момента задающего органа, первый сумматор и привод задающего органа, соединенный через датчик момента задающего органа с датчиком положения задшощего органа,, выход которого через второй сумматор подключен ко входу привода исполнительного органа, соединенного через датчик момента исполнител ; його органа с датчиком положения исполнительного органа, выход которого подключен ко второму входу второго сумматора, а выход датчика момента исполнительного органа соединен со вторым вх« |цом первого сумматора, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик системы, она содержит коммутатор и запоминающее устройство, причем выход, датчика полож4ния задающего органа соединен непосре ственио с третьим входом первого сумматора и через последовательно соединенаные коммутатор и запоминающее устройство с четвертым входом первого сумматора. Источники информации, принятые во внимание при экспертизе: 1,Каталоп-справочник Манипуляторы Л, 1968, с. 6О. 2.Кулешов В. С. и Лахота Н. А. Динамика систем управления манипуляторами, Энергия, 1971, с. 5-14.
