Изобретение относится к устройствам для кинематического исследования механизмов.
Известно устройство для кинематического исследовакия шарнирного многозвеннкка, содержащее шарнирно-рычажную систему, состоящую из ведущего кривошипно-шатунного механизма, .ведомого коромысла, двухповодкой группы с изменяемым по длине замыкающим коромыслом и шаблон, имитирующий траекторию движения исследуемого звена 1.
Однако такое устройство не позволяет производить синтез пространственных механизмов.
Целью изобретения является обеспечение возможности синтеза пространственных механизмов.
Для этого предложенное устройство имеет пространственный цирнирный многозвенник, выполненный в виде тетраэдра с регулируемым по длине звеньями, верщины которого связаны шарнирно соответственно с кривопшпно-щатунным механизмом, коромыслом, шаблоном и двухповодковой группой.
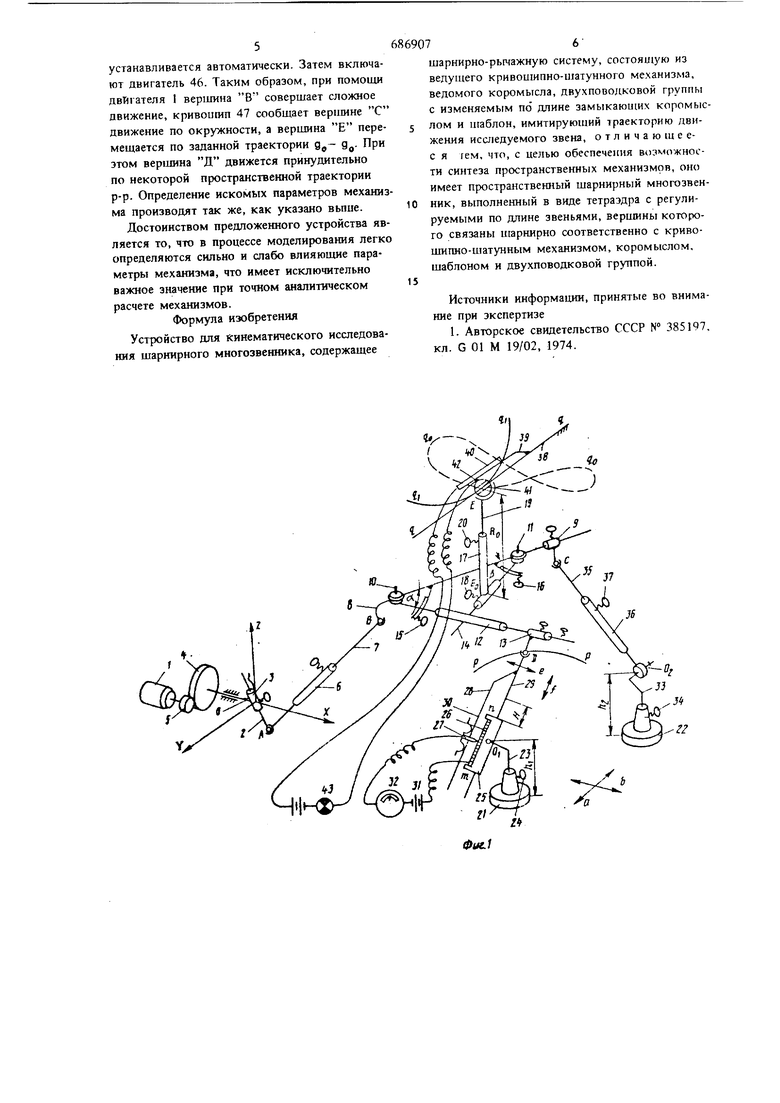
На фиг. 1 изображена кинематическая схема предлагаемого устройства на фиг. 2 - щарнирный тетраэдр; на фиг. 3 - дополнительный узел к предлагаемому устройству.
Устройство содержит электродвигатель 1, кривошип, состоящий из стержня 2 и втулки 3, связанной с электродвигателем i с помощью шестерен 4 и 5, шатун, состоящий из втулки 6, связанной шаровым шарниром со стержнем 2, и стержня 7, связанного гларовым шарниром звеном 8, несущим втулку 9 со сферическим шарниром С и оси 10 и 11. На оси 10
0 свободно надето заено 12 с лролольным пазом, имеющее втулку 13 с шаровым шарниром Д, а на оси 11 свободно установлено звено 14, конец которого проходит через продольный паз звена 12. Величина углов d и в между звеSньями 8 и 12, 8 и 14 может бьпь зафиксирована с помощью винтов 15 н 16. На звене 14 надета Т-образная втулка 17, положение которой может быть зафикси1хзвано винтом 18. Во втулке 17 помещен стержень 9, и.меющнй на свободном конце сферическое шсздо 1: являющееся вершиной тетраэдра В(Д1-. длииа звеньев которого регулируется с помощью BffliTOB 15, 16, 18 и 20.
На . столе устройства (на чертеже не показан) установлены плиты 21 и 22, удерживаемые силой тяжести. Стойка 23 соединена с плитой 21 винтом 24. Втулка 25 с проволочным сопротивлением 26 шарнирно связана со стойкой 23 j в точке О,. Скользящий контакт 27 расположен на отводке 28 коромысла 29 и подпружинен пружиной 30. Втулка 25 изготовлена из изоляционного материала и имеет ограничители тип. Контакт 27 замыкает электрическуюю
цепь, в которую входит источник питания 31 и гальванометр 32.
Од-н конец коромысла 29 помещен во втулке 25, а другой связан с вершиной тетраэдра через сферический щарнир Д. Стойка is 33 с плитой 22 связана винтом 34. Коромысло соединено со стойкой -33 с помощью вращательной пазы 0 и с тетраэдром - с помощью сферического щарнира С и состоит из двух частей 35 и 36, соединенных вин-. 20 ЮМ 37.
Устройство имеет направляющий щаблон 38, имитирующий траекторию исследуемого звена. На отводке 39 закреплена пластина 40 из фольги. Сферический шарнир 41 свободно надет25 на щаблон 38 и связан с веришной тетраэдра сферическим щарниром Е. Шарнир 41 контактирует с пластиной 40 через токосъемное кольцо 42. При движении щарнира 41 по щаблону 38 зажигается индикаторная лампа 43. При 30 замене прямолинейного щаблона 38 (д-д) на дугообразный в/-Qi) можно произвести синтез круговых направляющих механизмов.
Работает устройство следующим образрм. Для проектирования, например, пространст- 35 венного щестизвенного направляющего механизма выполняют следующие операции: по заданному условию ориентируют щаблон 38 относительно точки вращения кривощипа О. Фиксируют каркас тетраэдра ВСДЕ в произвольном положении и его верщину Е кинематически связывают с щарниром 41. На отводке 39 закрепляют пластину 40, длина и расположение которой соответствуют заданным условиям. Длину кривощипа (2, 3) и щатуна на (6,7)45
выбирают такой, чтобы при движении верщины .Е тетраэдра кольцо 42 перекрывало пластину 40. Шатун (АВ) кинематически связан с верщиной В тетраэдра ВСДЕ. Длину коромысла COj устанавливают произвольно и фиксируют 5° винтом 37. Высоту Нестойки 33 фиксируют винтом 34. Далее включают электродвигатель 1. Месторасположение плиты 22 и оси Oj автоматически устанавливаются. Вершина Д перемещается по пространственной траектории Р-Р и с ней связана двух поводке вал группа - коромысло 29 и втулка 25, Последняя щарнирно соединена со стойкой 23 при помощи вращательной кинематической пары О/г . Высочу hj. стойки 23 выбирают произвольно и фиксируют винтом 24. Таким образом, при движении вершины Д коромысло 29 совершает ошосительно точки Oj сложное движение: одно вдоль втулки 25 по стрелке f, а другое - качательное вокруг точки 0(, по стрелке I.
При перемещении контакта 27 вдоль проаолочного сопротивления 26 стрелка гальванометра 32 отклоняется. Во избежание ее заклинивания, на втулке 25 установлены ограничители тип. При перемещении коромысла 29 на величину, большую, чем длина сопротивления глп, контакт 27 сдвигается относительно отводки 28 и фиксируется пружиной 30. С целью определения искомых параметров механизма для заданного участка шаблона 38 необходимо плиту 21 вместе со стойкой 23 передвигать по стрелкам а и в, так чтобы относительное перемещение Н коромысла 29 и втулки 2 было бы наименьшим. Этому положению соответствует наименьшее отклонение стрелки гальванометра 32 от нулевой точки. Поиск наименьшего отклонения ведется при горящей лампе 43. Отклонение стрелки гальванометра 32 соответствует перемещению коромысла вдоль втулки 25 по стрелке f. Когда стрелка гальванометра 32 приближается к нулю, переменый радиус коромысла О)Д достигает постоянной величины. При мж: 1мальном отклонении стрелки выключают электродвигатель 1 и фиксруют искомые размеры пространственного шарнирного механизма. В данном случае измеряем длнну коромысла 0|Д и расстояние 00, OOj и OiOj. После определения этих параметров устройство освобождается от вспомогательных связей, снимают шаблон 38. При включении двигателя 1 точка Е. опишет приближенно заданную траекторию.
Аналогично можно проектировать пятизвенный пространственный направляющий механизм Для этого удяляют шатун АВ и заменяют прямлинейный щаблон 38(g-g) круговым (д,-д,); с помощью предложенного устройства можно решать и другие задачи. Например, проектирование пространственного семизвенного стержневого механизма по заданному участку прюстранственной шатунной траектории д (см. фиг. 1) с двумя ведущими кривошипами. Для этого верщину Е тетраэдра перемещают по шабну 38, профиль которого соответствует заданной траектории g,-g Затем освобождают с щарнир С и вместо двухповодковой группы, коромысла СОз и плиты 22 к вершине С тетраэдра ВСДЕ присоединяют узел, изображенный на фиг. 3, т.е. второй ведущий кривошип, После этого его длина, ориентация оси его враще1ния и расположение плиты 44 со стойкой 45
устанавливается автоматически. Затем включают двигатель 46. Таким образом, при помощи двигателя I вершина В совершает сложное движение, кривошип 47 сообщает вершине С движение по окружности, а вершина Е перемещается по заданной траектории д. При этом вершина Д движется принудительно по некоторой пространственной траектории р-р. Определение искомых параметров механизма производят так же, как указано вьпие.
Достоинством предложенного устройства является то, что в процессе моделирования легко определяются сильно и слабо влияющие параметры механизма, что имеет исключительно важное значение при точном аналитическом расчете механизмов.
Формула изобретения
Устройство для кинематического исследования шарнирного многозвенника, содержащее
869076
шарнирно-рычажную систему, состоящую из ведущего кривошипно-шатунного механизма, ведомого коромысла, двухповодковой группы с изменяемым по длине замыкающих коромыс5 лом и шаблон, имитирующий 1раекторию движения исследуемого звена, отличаю щ с ес я тем, что, с целью обеспечения возможности синтеза пространственных механизмов, оно имеет пространственный шарнирный многозвен10 ник, выполненный в виде тетраэдра с регулируемыми по длине звеньями, вершины которого связаны щарнирно соответственно с кривошипно-шатунным механизмом, коромыслом, шаблоном и двухповодковой группой.
15
Источники информации, прин5п-ые во внимание при экспертизе
1. Авторское свидетельство СССР № 385197. кл. G 01 М 19/02, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КИНЕМАТИЧЕСКОГО ИССЛЕДОВАНИЯ ШАРНИРНОГО ЧЕТЫРЕХЗВЕННИКА | 1973 |
|
SU385197A1 |
| Прибор для вычерчивания кривых | 1987 |
|
SU1447711A1 |
| Пространственный рычажныйМЕХАНизМ C пЕРиОдичЕСКОйОСТАНОВКОй | 1978 |
|
SU796574A1 |
| Пространственный рычажный механизм с периодическими остановками | 1985 |
|
SU1307134A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ ЗАХВАТА, УДЕРЖАНИЯ И ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 2018 |
|
RU2689270C1 |

