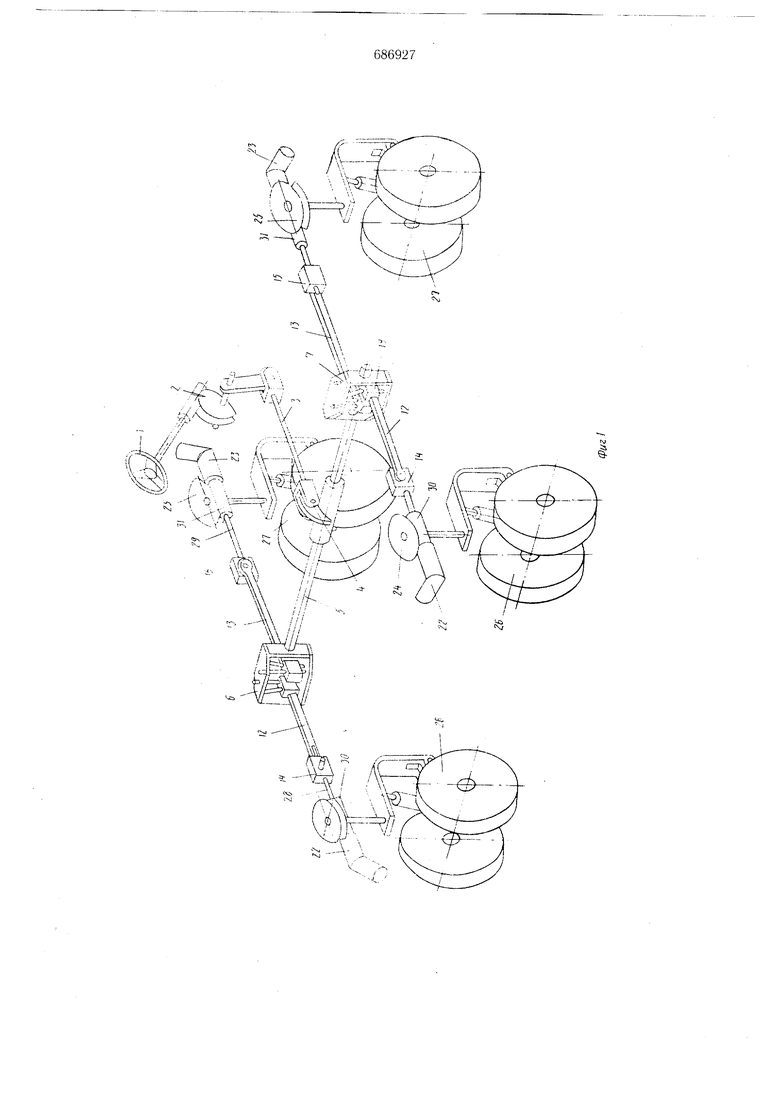
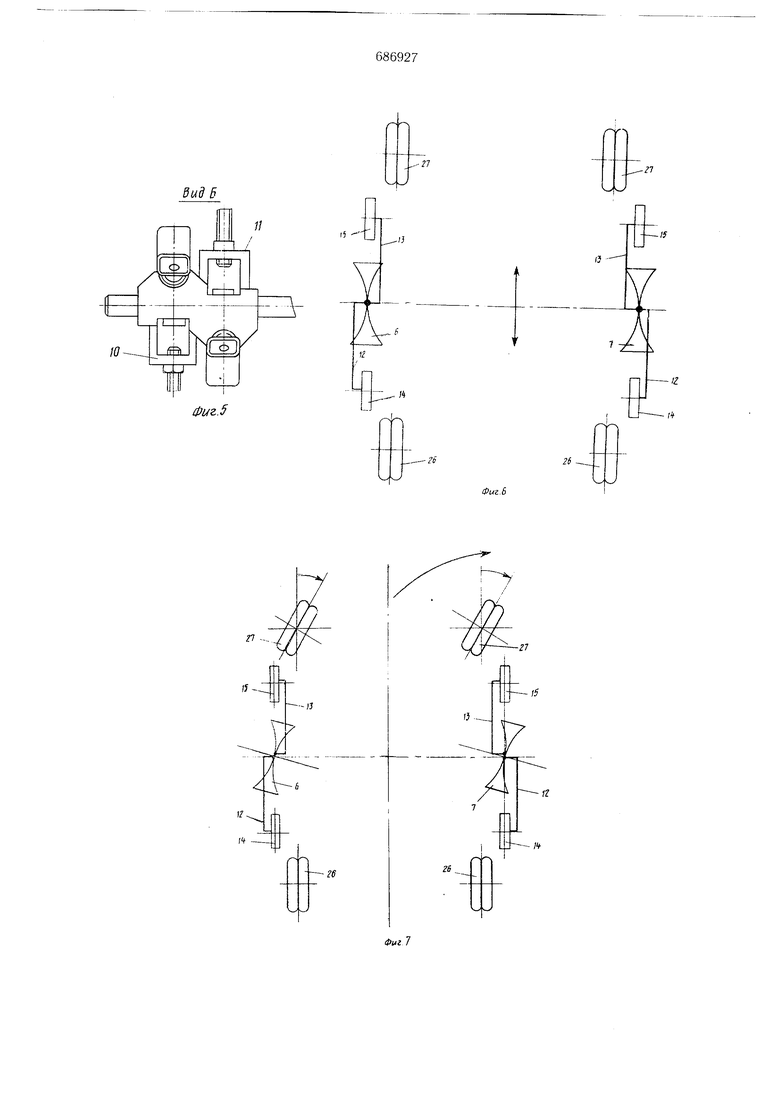
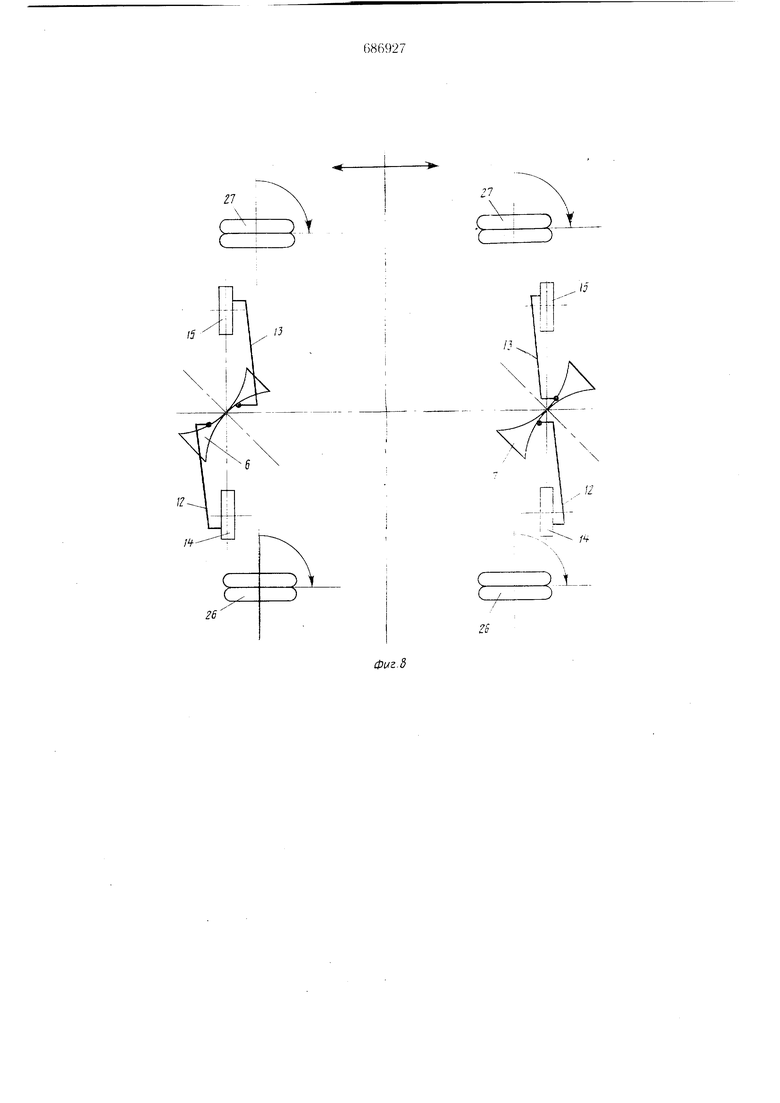
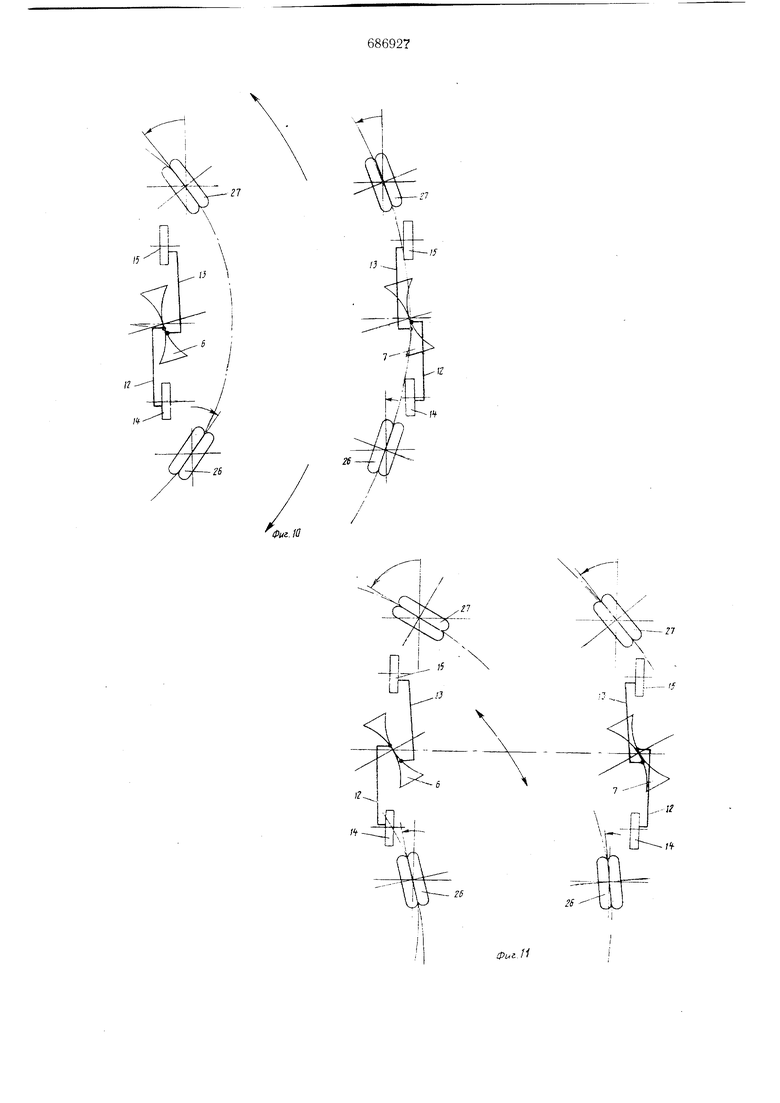
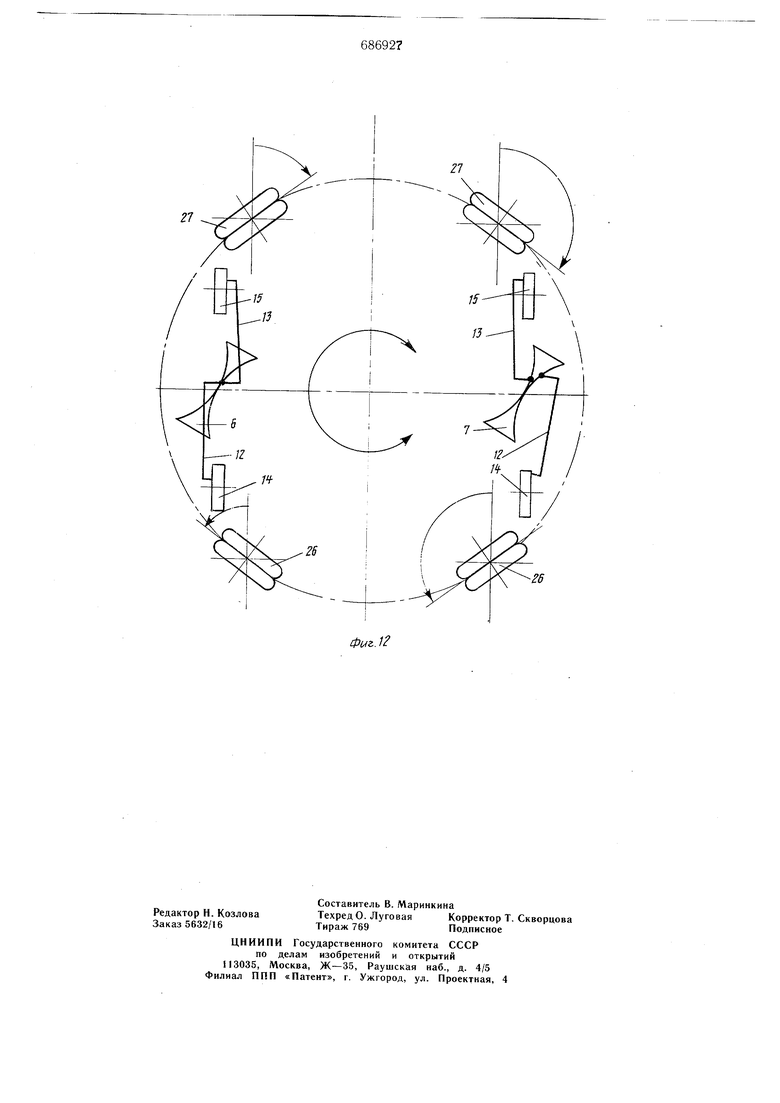
(54) РУДЕВОЙ ПРИВОД КОДЕСНОП М.ЛШППЫ СО ВСЕМИ УПРАВДЯЕ. КОДЕС.МИ Применение червячной пары разгружает кулнсный механизм от усилий, (юзникающих на поворотной колесной огюре при повороте и движении; наличие полностью независимых noiiopoTHbix опор расширяет диапазон настройки на различные программы всей системы в целом. На фиг. 1 показана кинематическая схема предлагаемого многонрограммногчз рулевого нривода; на фиг. 2 - устройство бортового кулисного механизма; на фпг. 3 -то же, вид сбоку; на фиг. 4 - разрез А---А на фиг. 2; на фиг. 5 - впд по стрелке Б на фиг. 2; на фиг. 6 - расстановка ползунов на направляющих кулис соответствующая выключенному состоянию системы управления колесными опорами; на фиг. 7 -расстановка ползунов на направляюндих кулис, соответствующая выключенному состоянию системы управления одной пары колесных опор; на фиг. 8 - расстановка ползунов на направляющих кулис соответствуюП1.ая движению трактора в сторону по тем или иным углом («крабовое движение); на фиг. 9 - расстановка ползунов на направляюншх кулис, соответствуюпхая повороту трактора вокруг центра, расположенного на продольной оси; на фиг. 10 - расстановка ползунов на направляющих кулис, с(Х)тветствующая повороту всех колесных онор для движения по окружности, центр которой расположен на поперечной оси трактора; на фиг. 11 - расстановка ползунов на направляющих кулис, соответствующая повороту всех колеспых опор для осуществления разворота магпины вокруг центра, нележан.его на каких-либо осях на фиг. 12 - расстановка ползунов на направляющих кулис, соотБетствуюн1ая повороту всех колесных опор для разворота по окружности, LieiiTj) которой лежит на гео.метрической оси трактора («карусель). Пред,1агасмое устройство (см. фиг. 1 и 2) содержит рулевое колесо 1 с рулевым механизмом 2, соединенным с помощью тяги 3 с СОП1КОЙ 4 поперечного вала 5, на котором закреплены два бортовых кулисных .механиз.ма 6 и 7. Каждый из этих механизмов имеет по два дугообразно изогнутых стержня 8 и 9, которые служат направляющими для ползунов 10 и II. Радиус изгиба стержней 8 и 9 выбран так, чтобы нри расстановке ползунов вдоль стержней по той или иной программе, расстоя1Н1е от средней точки ползуна до оси шарнира противоположной, головки тяги 12 и 13 было неизмененным т. е. радиус R изгиба стержня должен быть равен длине тяги, соединяющей ползуны 10 и 11 с распределителями 14и15. Для расстановки и фиксации ползунов но направляющим служат винтовые пары. состояп ие из ходовых винтов 16 и 17 и гаек 18 и 19 ползунов. Гайки 18 и 19 винтовых пар кулачковыми выступа.ми удерживаются от проворачивания в пазах ползунов, а опоры винтов 16 и 17 расположены в верхней и нижней пластинах корпуса блока кулис. Винты 16 и 17 вращаются посредством сервоприводов 20 и 21 с дистанционным управлением от задатчика програм.м, расположенного в кабине трактора. Ползуны 10 и 11 соединены тягами 12 и 13 с распределитааями 14 и 15. управляющими -включением серводвигателей 22 и 23 червячных редукторов, червячные колеса 24 и 25 которых жестко установлены на цапфах колесных онор 26 к 27. Через сквозные резьбовые отверстия в корпусах распределителей 14 и 15 проходят випты 28 и 29, жестко связанные с червячными валками 30 и 31. Такое соединение позволяет осуществить обратную связь между управляющим воздействием и углом поворота колесной опоры, котор1)1Й в этом случае полностью согласуется с линейным нере.мещением корпуса распределителя, а следовательно и ползуна кулисы. Предлагае.мый механизм работает след тощим образом. Водитель с но.моптью задатчика програ.мм посылает сигнал па сервоприводы винтовых пар, осуществляющие расстановку ползунов 10 и 11 с помощью винтов 16 и 17 на направляюндих стержнях 8 и 9 по позициям, соответствующим выбранной програм.ме, например посредством сравнения сигналов от реохордных элементов задатчика программ и привода винта при включении их в плечи мостовой схемы. Затем управляющее воздействие от руки водителя передается через колесо 1, механизм 2, тягу 3 на сотку 4 поворачивающую вал 5. При этом поворачиваются механизмы 6 и 7, расположенные на валу 5 по борта.м машины, а пере.мещения ползунов 10 и 11, отклоняющихся в.месте с кулисами, передаются через тяги 12 и 13 на распределители 14 и 15, которые в свою очередь, управляют включение.м приводов поворота колесных опор до поворота их на требуемый угол. Формула изобретения Рулевой привод колесной машины со всеми управляемыми колесами, содержащий рулевое колесо с рулевы.м механизмом, связанные с последним бортовые кулисные механизмы, состоящие из направляющей и ползуна и соединенные с распределитетями, и привод поворота колес, отличающийся те.м, что, е целью обеспечения .многопрогра.м.мпо|о управления, уменьшения габаритов и увеличения надежности привода, он снабжен серводвигателями, связанными с распределителями, а каждый из бортовых кулиспых механизмов выполнен в виде корпуса, жестко соединенного с приводимым от рулевого механизма валом, и снабжен закрепленными на нем по числу колес борта механизмами, состоящими из винта с гайкой и дугообразной направляющей с перемещающимся по ней ползуном, соединенным с гайкой и распределителем, а рулевой механизм выполнен в виде червячной пары.
Источники информации, принятые во внимание при экспертизе
1. Патент ГДР № 72220, кл. В 62 D, 1970. vV,-, ;;. - . - -1- ;. 7 / / Г--. r-j. Л t/ (-:J& - i . - (f Hf - -Jr- (//; Ли .A ( / Л- . . - 0. ) M : : -v ,/; / -y ,/ л : I A
IS
€3
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМЫХ КОЛЕС | 1999 |
|
RU2168437C2 |
| Устройство для управления транспортным средством со всеми управляемыми колесами | 1975 |
|
SU583018A1 |
| Движительно-рулевой комплекс плавникового движителя С.М.Устинова | 1984 |
|
SU1245501A1 |
| РУЛЕВОЙ ПРИВОД ДЛЯ КОЛЕСНЫХ МАШИН СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1973 |
|
SU380513A1 |
| Устройство управления передними колесами тягового загрузчика | 1991 |
|
SU1789406A1 |
| КОЛЕСНЫЙ ТРАКТОР | 1992 |
|
RU2020103C1 |
| Подвеска спортивного автомобиля с наклоном колес и кузова в сторону поворота с прогрессивной характеристикой подвижных элементов | 2020 |
|
RU2737082C1 |
| Рулевое устройство для транспортного средства со всеми управляемыми колесами | 1974 |
|
SU561687A1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2014 |
|
RU2551695C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2192033C1 |


. 2
Фиг.
Вид В
ЮФиг.5
, L,
26
15
12
/
J7
() t
( f)
fff
:
26 I
гь
Z1
77
-Т ti.,,
;1Li
26
.a
