fO
Сд
го
СД OD СО
(риг.4
Изобретение относится к машиностроению и предназначено для использования в промыи1ленных роботах, применяемых для выполнения подъемно-транспортных, мон- тажно-сборочных и технологических операций, а также в дистанционных манипуляторах, работающих в зонах радиоактивного излучения.
Целью изобретения является расширение зоны обслуживания за счет изменения конфигурации механической руки.
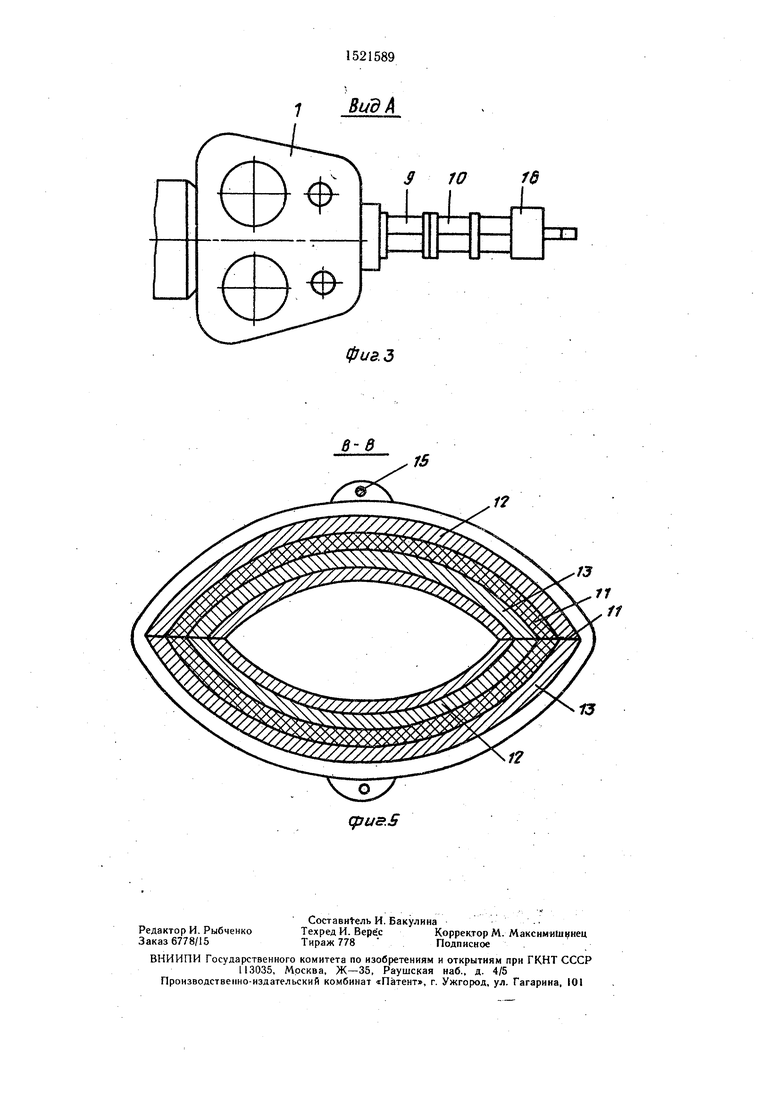
На фиг. 1 изображен исполнительный орган промышленного робота, обш.ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - то же, в исходном положении; на фиг. 4 - разрез Б-Б на фиг. 1; на фи.г. 5 - сечение В-В на фиг. 4.
Исполнительный орган промышленного робота содержит корпус 1, внутри которого размещены основные 2 и дополнительные 3 барабаны с приводами 4 и 5, например электродвигателями. На основных барабанах 2 закреплены упругие стальные ленты 6, образующие механическую руку (удлинитель) 7, упругие концы этих лент связаны между собой. Удлинитель 7 проходит сквозь направляющий механизм 8, установленный на корпусе 1, и направляющие элементы (втулки) 9 и 10, выполненные из жестко соединенных между собой слоев материалов с неодинаковым коэффициентом линейного расширения, например из трех слоев: внутренний слой 1 1 обеспечивает нагрев слоя 12 материала с малы.м коэф- фициенто.м линейного расширения и слоя 13 материала с большим коэффициентом линейного расширения.
Втулка 9 связана гибкой тягой 14, выполненной в виде электропровода, с источником электропитания (не показано) и с дополнительным приводным барабаном 3 с возможностью наматывания на него или сматывания. Втулка 10 связана гибкой тягой 15, проходящей сквозь втулку 9 через отверстие и выполненной в виде электропровода, с источником электропитания и дополнительным приводным барабаном 3 с возможностью наматывания на него или сматывания. На конце механической руки закреплен схват 16.
Исполнительный орган промышленного робота работает следующим образом.
В исходном состоянии упругие стальные .|енты 6 на.мотаны на основные приводные барабаны 2, при этом направляющая втулка 8, втулки 9 и 10 и схват 16 располагаются вплотную друг к другу, гибкие тяги 14 и 15 намотаны на дополнительные приводные барабаны 3. При вращении основных приводных барабанов 2 от приводов 4 у фугие стальные ленты 6 сматываются и выталкиваются из корпуса 1 через направляющую втулку 8, образуя удлинитель 7. Удлинитель 7 выдвигается, при этом
втулки 9, 10 и схват 16 располагаются вплотную друг к другу и выдвигаются с удлинителем. Это движение происходит до тех пор, пока дополнительный
приводной барабан 3 с закрепленной гибкой тягой 14 не остановит свое вращение посредством тормоза в приводе 5, определяя длину вылета удлинителя 7 в этом направлении. После прекращения движения
. втулки 9 для изгиба удлинителя 7 к втулке 9, а именно внутреннему слою 11, подводится ток с помощью гибкой тяги (электропровода) 14. Нагреваясь, втулка изгибается в сторону слоя с меньшим коэффициентом линейного расщирения, и вместе
5 с ней изгибается удлинитель 7. При последующем выдвижении удлинителя 7 сквозь втулку 9 продолжают перемещение втулка 10 и схват 16, а тяга 15 свободно разматывается, проходя через отверстие во втул- ке 9. Это движение соверщаетс.я до тех пор, пока дополнительный приводной барабан 3 с закрепленной тягой 15 не остановит свое вращение посредством тормоза в приводе 5, определяя длину вылета удлинителя 7 в этом направлении. После
5 прекращения движения втулки 10 к ней с помощью гибкой тяги подводится ток, втулка 10 нагреваясь, изгибается вогнутостью в сторону слоя с меньшим коэффициентом линейного расщирения, и вместе с ней изгибается удлинитель 7. При последующем
0 выдвижении через втулку 10 перемещается удлинитель 7, неся на себе схват 16. Это движение происходит до требуемой координаты, затем прекращается вращение основных приводных барабанов 2, схват 16 захватывает заготовку. Основные приводные
5 барабаны 2 начинают наматывать на себя упругую стальную ленту 6, и одновременно гибкие тяги 14 и 15 наматываются на барабаны 3. Удлинитель 7 со всеми его элементами возвращается в исходное
0 состояние (с предварительно отключенным током на нагревание втулок 9 и 10) в следующей последовательности: сначала смыкаются направляющая втулка 8 и втулка 9, затем втулки 9 и 10, затем схват 16 с зажатой заготовкой, изменив величины
5 сматывания гибких тяг 14 и 15 с дополнительных приводных барабанов 3, опреде- л яет координаты, куда необходимо доставить заготовку.
В предлагаемом исполнительном органе промышленного робота упругий элемент, выполненный в виде двух стальных корытообразных лент, заменяет многозвенную систему рычагов, что упрощает конструкцию. В исходном состоянии исполнительный орган имеет малые габариты, выдвижение
г его осуществляется приводами, установленными в корпусе, что значительно облегчает подвижную часть и расширяет его .технологические возможности.
0
Формула изобретения Исполнительный орган промышленного робота, содержащий корпус, механическую руку, выполненную в виде двух упругих лент, закрепленных одними концами на основных приводных барабанах, установленных в корпусе, а другими связанных между собой и проходящих через направляющий механизм, размещенный на корпусе, а также направляющие элементы, установленные на механической руке, и гибкие тяги, одними концами закрепленные на соответствующих направляющих элементах.
0
а другими концами - на. дополнительных приводных барабанах, установленных в корпусе, отличающийся тем, что, с целью рас- щирения зоны обслуживания за счет изменения конфигурации механической руки, он снабжен источниками питания, размещенными в корпусе, а каждый направляющий элемент выполнен в виде втулки из жестко соединенных между собой слоев материалов с неодинаковым коэффициентом линейного расщирения, а гибкие тяги выполнены в виде электропроводов, связанных с источниками электропитания соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530441A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1504095A1 |
| Промышленный робот | 1986 |
|
SU1400883A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН РОБОТА | 2003 |
|
RU2250818C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |

Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения подъемно-транспортных, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах, работающих в зонах радиоактивного излучения. Целью изобретения является расширение зоны обслуживания за счет изменения конфигурации механической руки. Для этого втулки 9 и 10, установленные на удлинителе, выполнены из жестко соединенных между собой слоев материалов с неодинаковым коэффициентом линейного расширения. При этом внутренний слой каждой втулки 9 и 10 посредством соответствующей гибкой тяги (14 и 15), выполненной в виде электропровода, связан с источником электропитания. 5 ил.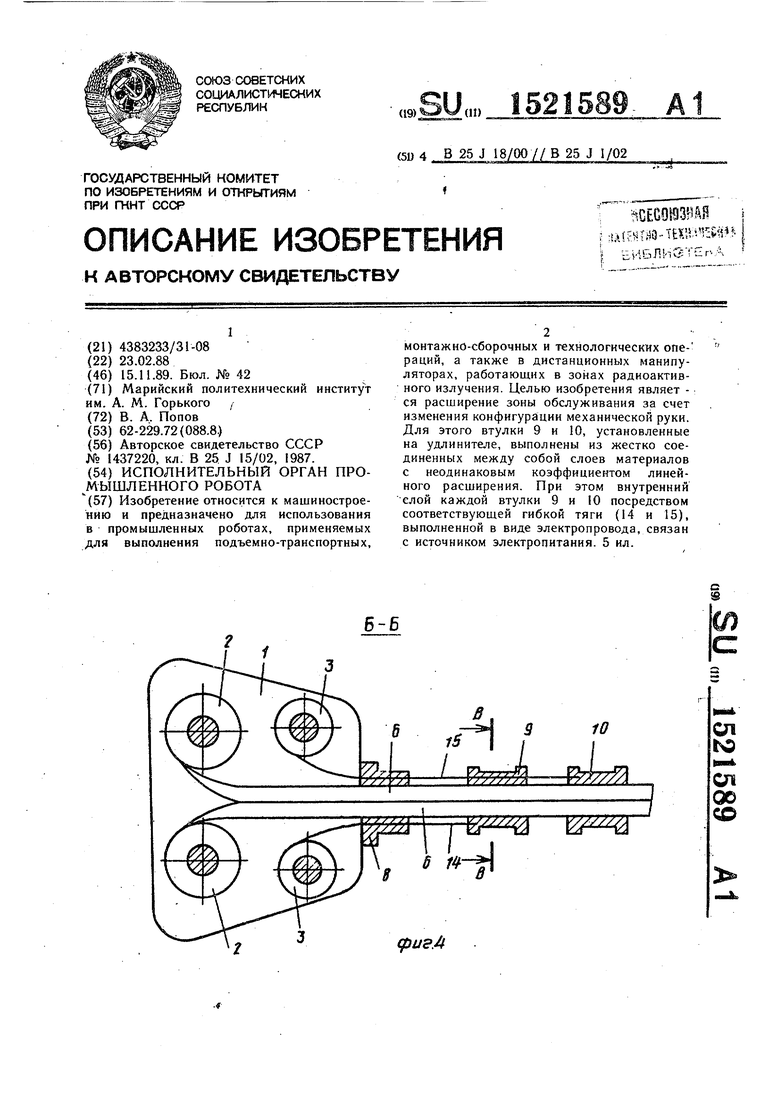
А 4 .5 1
873
/О
NX
фаг.1
вид А
tzn
фиг. 2
фиаЗ
Id
zn
12
13
13
12
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
