иISgBlk4;
О5
кэ
05
fus.S
Мзооретение относи1ся к робототехнике ч может быть использовано в качестве манину.пятора для механизации и автоматизации трудоемких процессов. ; Цель изобретения - повышение точности : позиционирования за счет повышения жест- i кости системы.
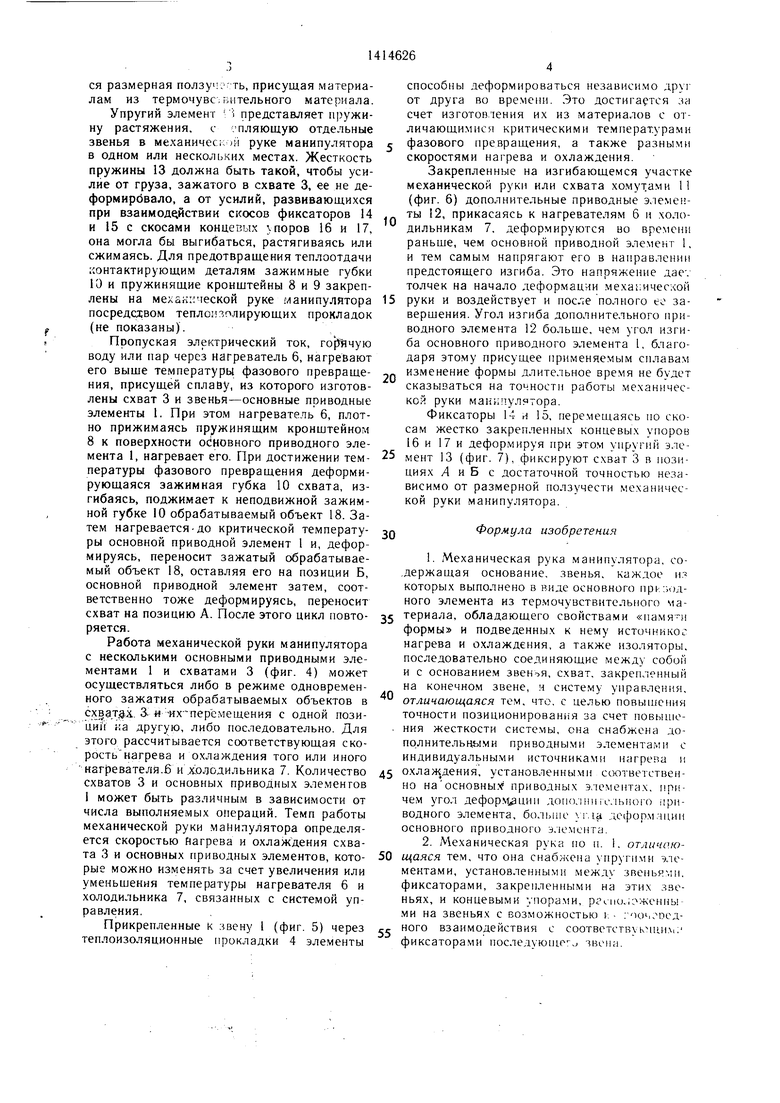
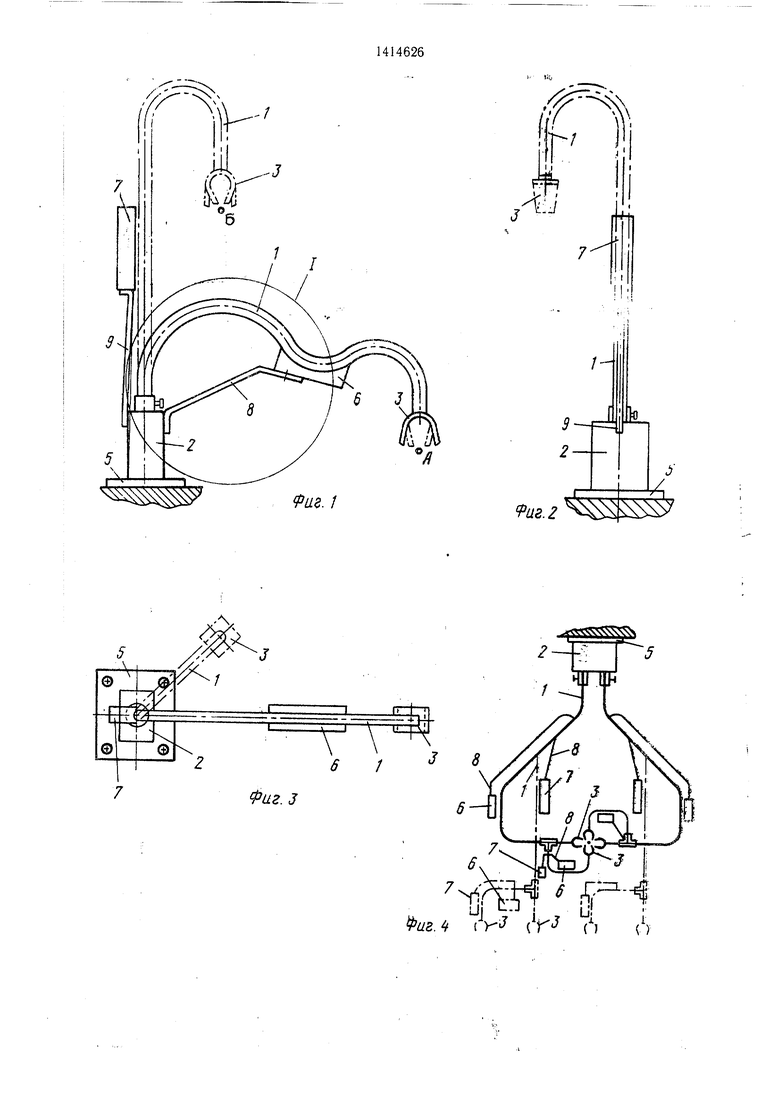
I На фиг. изображена механическая рука I манипулятора, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - вариант выполнения манипулятора, имеющего несколько механических рук; на фиг. 5 - узел I на фиг. 1; Ьс- I новной приводной элемент; на фиг. 6 - то I же, дополнительный приводной элемент; на I фиг. 7 - то же положение звена при бзаимо- I действии фиксаторов с концевыми упЬрами; I на фиг. 8 - схват механической руки ма Ьи- I пулятора.
1 Механическая рука манипулятора со- стоит из звеньев 1, каждое из которых выполнено полностью или участками в виде основного приводного элемента из термо- 1 чувствительного материала, обладающего свойствами «памяти формы, например, из
сплавов Си-А1-Мп, Си-А1-Ni, а также никелида титана или из хрома. Эти мате; риалы в узком температурном интервале
10°С переходят из одного фазового состояния (пластичного) в другое (сверхупругое) и наоборот. Исходя из условия требуемой
: прочк ости выбираются соответствующая I форма и размеры поперечного сечения зве- I на 1. Длина механической руки манипуля- I тора и его первоначальная и последующая I конфигурации определяются точкой крепле- I ПИЯ механической руки манипулятора на ос- новании 2 и расстоянием от нее до точек начала и конца технологического марщрута, а также требуемой траектории перемещения схвата 3. В зависимости от технологических условий механическая рука манипулятора состоит из одного или нескольких звеньев - основных приводных элементов 1, соединенных между собой и с основанием 2 изоляторами 4, например теплоизоляционными прокладками. Механическая рука манипулятора через изоляторы 4 закрепляется на основании 2, который при помощи монтажного фланца 5 может быть в каждом конкретном случае закреплен на полу, на потолке, на вертикальной стойке, на подвижной кран- балке или на транспортном средстве. Нагрев и охлаждение основных прив.одных элементов 1 в зависимости от его применения может производиться различными способами всех основных приводных элементов 1 как одновременно TJK и последовательно. Пропуская элект .ическкм ток по основному приводному элементу 1 гли нагревая контактирующий с ним источник нагрева - нагреватель G, плотно прижатый к нему, можно нагреть элементы 1.
Кроме того, можно нагревать основные приводные элементы 1 как жидким, так и газообразным тейлойосителем, омывающим внутренние стенки основного приводного элемента или наружные, заключенные в эластичную рубашку (не показана). Охлаждение основных приводных элементов может производиться при помощи контактирующих с ними Источников охлаждения-холодильников 7, пЛотно к ним, либо зй счет по- дачИ внутри или снаружи основных приводных элементов 1 жидкого или газообразного хладагента. К основанию 2 при помощи пружинящего кронштейна 8 прикреплен нагреватель 6, а при помощи пружинящего крон.штейна 9 - холодильник 7.
Схват 3 крепятся на конце механической руки посредством изолятора (те11лоизоля- ционной прокладйи) 4, его зажимная губка 10 выполнена из термочувствительного материала, обладающего свойствами «памя ти формы, k которым также подведены источники нагрева 6 и охлаждения 7. Конфигурация зажимных губок такова, что в охлажденном состоянии они пропускают охватываемый предмет, а в нагретом, деформируясь,
5 зажимают его. В зависимости от выполняемых технологических операций, крогле такою схвата, может быть любой другой схват известной конструкции: с пневмоприсосками, электромагнитный и т.д.
Кроме того, на некоторых основных при водных элементах 1 закреплены при помощи хомутов 11 дополнительные приводь ые элементы 12, изгртов гннь1е из термо-1увстви- тельного материала, обладающего спойства- ии «памяти формы с индивидуальнь.и источниками нагрева и охлаждения (не показаны). При этом угол деформации дополнительного приводного элемента 12 больше угла деформации основного приводного элемента 1. Некоторые звенья - основные приводные элементы 1 скреплены между со0 бой при помощи упругого элемента 13, который может изгибаться,, удлиняться и укорачиваться при взаимодействии фиксаторов 14 и 15, закрепленных на это.м звено, с концевыми упорами 16 и 17, расположенными на
с основании 2 или предыдущем звене.
Масса нагревателя 6 и холодильника 7 и их температуры расчитываются в зависимости от требуемой скорости нагрева и охла ч- дения того или иного участка механической
0 руки манипулятора. Этим самым задается скорость работы механической руки манипулятора в автоматическом режиме, т.е. от системы управления (г.э показана). Жесткость и угол деформации дополнительного приводного элемента 12 выбираются такими,
чтобы ра.эвиваемого усилия было достаточно для догибания звеньев механической руки манипулятора к первоначально заданной его конфигурации. Благодаря этому устраняется размерная ползуч ть, присущая материалам из repMOMyBCjвительного материала.
Упругий элемент -i представляет пружи- иу растяжения, с спляющую отдельные звенья в механической руке манипулятора в одном или нескольких местах. Жесткость пружины 13 должна быть такой, чтобы усилие от груза, зажатого в охвате 3, ее не де- формирбвало, а от усилий, развивающихся при взаимодействии скосов фиксаторов 14 и 15 с скосами концевых поров 16 и 17, она могла бы выгибаться, растягиваясь или сжимаясь. Для предотвращения теплоотдачи : ,онтактирующим деталям зажимные губки 10 и пружинящие кронштейны 8 и 9 закреплены на механической руке манипулятора посредством теплоизолирующих прокладок (не показаны).
Пропуская электрический ток, го рйчую воду или пар через нагреватель 6, нагревают его выше температуры фазового превращения, присущей сплаву, из которого изготовлены схват 3 и звенья-основные приводные элементы 1. При этом нагреватель 6, плотно прижимаясь пружинящим кронштейном 8 к поверхности основного приводного элемента 1, нагревает его. При достижении температуры фазового превращения деформирующаяся зажимная губка 10 схвата, изгибаясь, поджимает к неподвижной зажимной губке 10 обрабатываемый объект 18. Затем нагревается-до критической температуры основной приводной элемент 1 и, деформируясь, переносит зажатый обрабатываемый объект 18, оставляя его на позиции Б, основной приводной элемент затем, соответственно тоже деформируясь, переносит схват на позицию А. После этого цикл повторяется.
Работа механической руки манипулятора с несколькими основными приводными элементами 1 и схватами 3 (фиг. 4) может осуществляться либо в режиме одновременного зажатия обрабатываемых объектов в схва.тях. 3- « -их-перемещения с одной пози- ции ка другую, либо последовательно. Для этого рассчитывается соответствующая ско- рость нагрева и охлаждения того или иного нагреватели.6 и Холодильника 7. Количество схватов 3 и основных приводных элементов I может быть различным в зависимости от числа выполняемых операций. Темп работы механической руки манипулятора определяется скоростью Нагрева и охлаждения схвата 3 и основных приводных элементов, которые можно изменять за счет увеличения или уменьшения температуры нагревателя 6 и холодильника 7, связанных с системой управления.
Прикрепленные k звену I (фиг. 5) через теплоизоляционные прокладки 4 элементы
способны деформироваться независимо друг от друга во времени. Это достигается за счет изготовления их из материалов с отличающимися критическими температурами фазового превращения, а также разными скоростями нагрева и охлаждения.
Закрепленные на изгибающемся участке механической руки или схвата хомут.ами 11 (фиг. 6) дополнительные приводные элементы 12, прикасаясь к нагревателям 6 и холодильникам 7. деформируются во времени раньше, чем основной приводной элемент 1, и тем самым напрягают его в направлении предстоящего изгиба. Это напряжение дае . толчек на начало деформации механической руки и воздействует и после полного ее завершения. Угол изгиба дополнительного приводного элемента 12 больше, чем угол изгиба основного приводного элемента 1, благодаря этому присущее применяемым сплавам .. изменение формы длительное время не будет сказываться на точности работы механической руки манипулятора.
Фиксаторы 14 и 15, перемещаясь по скосам жестко закрепленных концевы.ч упоров 16 и 17 и деформируя при этом упругий элемент 13 (фиг. 7), фиксируют схват 3 в позициях /1 и Б с достаточной точностью независимо от размерной ползучести механической руки манипулятора.
5
5
0
5
0
5
0
5
Формула изобретения
1.Механическая рука манипулятора, со- ,держащая основание, звенья, каждое ия
которых выполнено в виде основного npk;iOA- ного элемента из тер.мочувствительного материала, обладающего свойства.ми «памя и формы и подведенных к нему источнико:- нагрева и о.хлаждения, а также изоляторы, последовательно соединяющие между собой и с основанием звен- я, схват, закрепленный на конечном звене, и систему управления, отличающаяся тем, что, с целью повышения точности позиционирования за счет HOBHILIO- ния жесткости системы, она снабжена дополнительными приводными элементами с индивидуальными источниками нагрег а и охлаждения, установленными ссютветствен- но на основны.- приводных э.чемептах, npit- че.м уго, 1 дeфop aциn допо/пшпмыюго приводного элемента, бол1)111е г.la деформации основного приводного э.юмопта.
2.Механическая рука по п. 1, отличающаяся тем, что она снаб/кена упругими элементами, установленными между звеньями, фиксаторами, закрепленными на этих звеньях, и концевыми упорами, .; жеины- ми на звеньях с возможностью . .чо мтед- ного взаимодействия с соответствукмцпл : фиксаторами последующе. звона.
fas. /
А
иг.2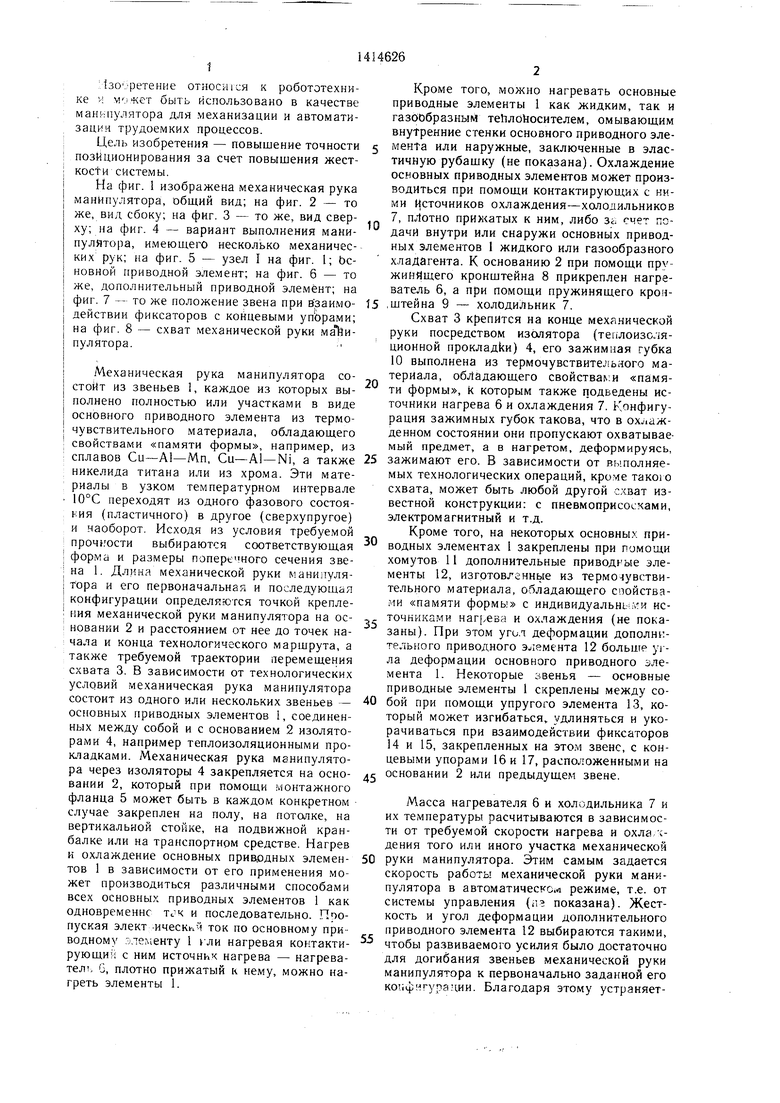
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с программным управлением | 1978 |
|
SU688329A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Схват промышленного робота | 1985 |
|
SU1305031A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| Групповой схват | 1985 |
|
SU1311926A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| Роботизированный комплекс горячей штамповки | 1988 |
|
SU1613235A1 |

Изобретение относится к области робототехники и может быть использовано в качестве манипулятора для механизации и автоматизации трудоемких процессов. Целью изобретения является повышение точности позиционирования за счет повышения жесткости системы. Для этого на некоторых основных приводных элементах 1 гакреплены lijiii помощи хомутов 11 дополмчтсльныс приводные элементы 12, H3roT rvieHHbie из термочувствительного матери1ла, обладаюии .о свойствами «памяти фор//-..-,- v: индиоп уаль- иыми источниками нагрева и охлаждения. Причем угол деформации, донолнитсльпо о приводного элемента 12 больше угла деформации основного приводного элемента 1. Основные приводные элементы 1 скреплсм1ы между собой при помощи упругого элемента. Упругий элемент имеет возможность изгибаться, удлиняться и укорачиваться прп взаимодействии фиксаторов, :)акреп. 1енпы на звено с концевыми упорами, распо.южен- ным;; :а основании 2 или предыдущем зноне. 1 З.П. ф-лы, 8 ил. S
Л
Фиг. 4 1 (V (
иг. 7
9аг. 5
tfi
| Манипулятор с программным управлением | 1978 |
|
SU688329A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
