Изобретение относится к известным в технике крановым захватам для грузов, представляющим собой челюсти, шарнирно смонтированные на траверзе и шарнирно сочлененные с вертикально подвижной подвеской, автоматически соединяемой со второй траверзой, выполненной вертикально подвижной относительно первой и несущей на себе поворотный рычажок, находящийся под воздействием противовеса и осуществляющий это соединение.
Предлагаемый захват отличается от существующих тем, что для автоматического управления челюстями поворот рычажка осуществляется кулачком, смонтированным на храповом колесе, связанном посредством собачки с соосной щестерней, сцепленной с рейкой, укрепленной на третьей траверзе, вертикально подвижной относительно второй и подвешенной к канату.
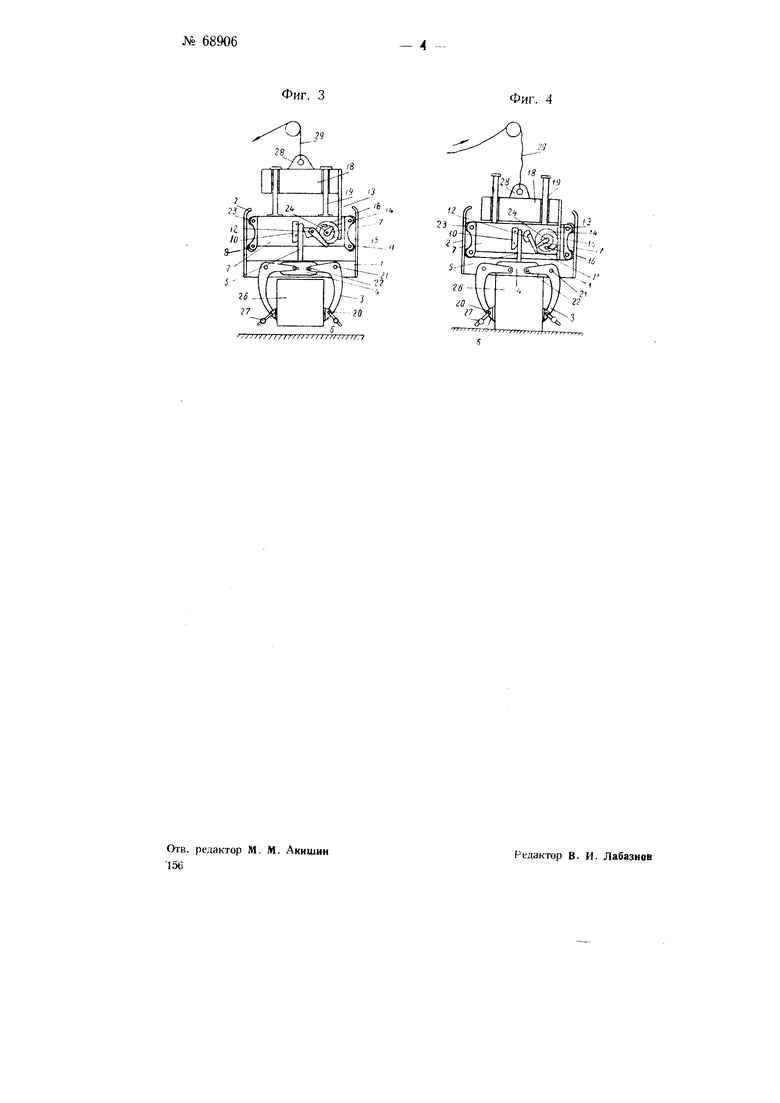
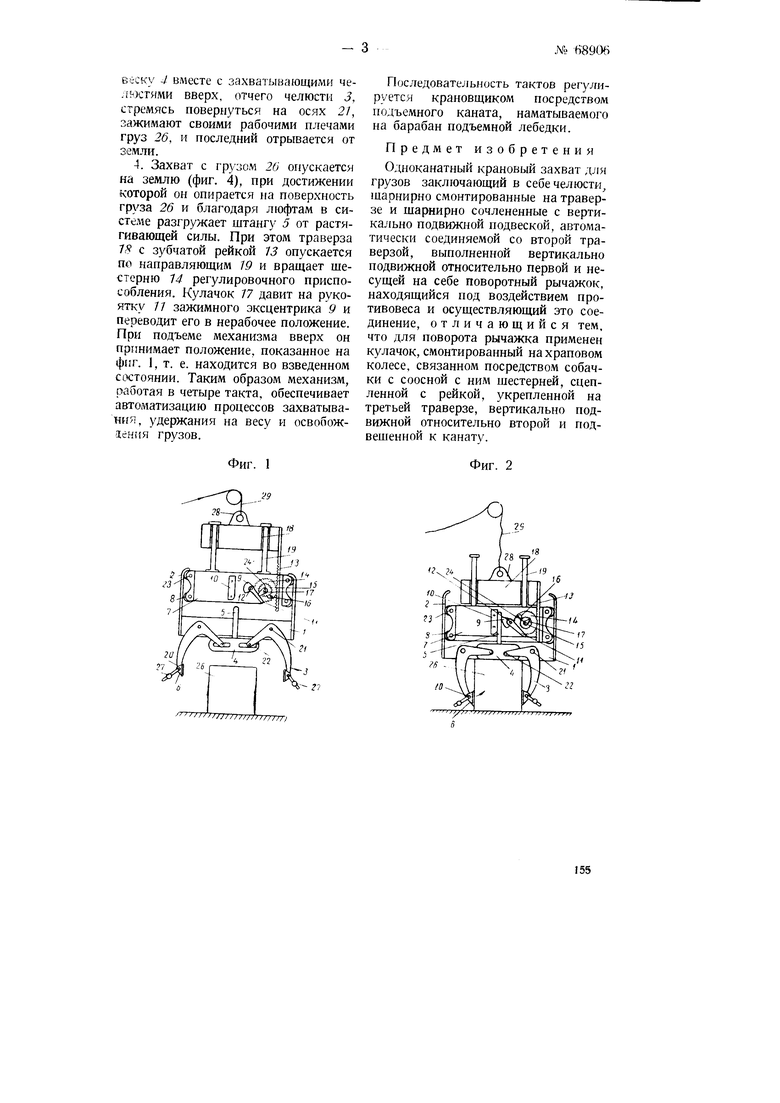
На фиг, 1 изображен захват в момент его опускания на груз, на фиг, 2 - захват в момент сцеплений с грузом, на фиг. ,3 - захват в момент
подъе.ма груза, на фиг, 4 - захват в момент приземления груза.
Захват предназначается для автоматического захвата предметов во время их подъема, перемещения и освобождения при доставке на место.
Захватывающие устройства состоят из спаренно работающих челюстей 3 свободно подвещенных к траверзе 7 на осях 21. Челюсти имеют на концах ролики 22, свободно перемещающиеся по продольным пазам подвески 4, благодаря чему при движении подвески 4 вверх или вниз обеспечивается одновременный поворот челюстей 3 на осях 27. На другие концы челюстей 3 на осях 20 посажены бащмаки 6, служащие для увеличения повер сности соприкосновения с захватываемым грузом 2(5. Башмаки 6 имеют плечи, на которых подвешиваются грузики 27, обеспечивающие вертикальное направление рабочих поверхностей бащмаков при захватывании ими груза.
Подвеска 4 наглухо соединена со штангой 5, которая при подъеме груза
153
тянет подвес1 у вверх. При :лом захватывающие челюсти 3 производят ЗЛЖКЛ1 груза рабочими поверхностями башмаков.
Зажимное приспособление, предназначенное для зажима штанг 5, состоит из упорной планки 70 и зажимного эксцентрика 9 с рукояткой //, которые устанавливаются на корпусе траверзы 7. Упорная планка с помощью болтов наглухо прикреплена к корпусу траверзы 7 в одной плоскости с зажимным эксцентриком 9, свободно посаженным на ось 72. Вес зажимного эксцентрика .9 берется больще веса его рукоятки 77, чтобы обеспечить наклон эксцентрика 9 в сторону упорной планки /0. Подъем и опускание рукоятки 77 зажимного эксцентрика 9 контролируется регулировочным приспособлением в зависимости от рабочего и холостого хода захвата. Регулировочное приспособление состоит из зубчатой рейки /3, щестеренки 74, храповика 75 с собачкой /6, траверзы 7 и кулачка 77 с фиксатором. Траверза 7 посредством своего ушка 2S соединена с подъемным канатом 29. При освобождении подъемного каната 29 траверза 7S под действиел1 своего веса опускается, а при натягивании каната подымается вверх по направляющим J9. Движение траверзы W через посредство закрепленной на ней зубчатой рейки 7J передается на шестеренку /4, которая свободно посажена на ось 24 и имеет на боковой поверхности эксцентрично прикрепленную собачку 76. На ось 24 наглухо посажен храповик 75. Собачка J6 вращает его на половину оборота при опускании зубчатой рейки 73 вниз. При подъеме траверзы 78 с рейкой 73 собачка 76 скользит по зубьям храповика 75 и шестеренка 74 вращается вхолостую. На квадратный конец оси 24 неподвижно одет кулачок 77, который, вращаясь в одной плоскости с рукояткой 77 зажимного эксцентрика 9, устанавливает эксцентрик в рабочее и холостое положение через каждую половин} оборота кулачка 77.
В соответствии с количеством вы154
полняемых операций захват работает в четыре такта.
1.Захват находится во взведенном положении и висит на канате 29 на некоторой высоте от земли (фиг. 1). При этом подвеска 4 со щтангой 5 опущена вниз, находится в крайне нижнем положении и держится на весу захватывающими челюстями 3. Рабочие плечи челюстей 3 раскрыты на полный угол обхвата, при этом штанга 5 не зажата зажимным приспособлением.
Траверза 7 посредством стоек 2 удерживается на траверзе 7 захвата, которая с помощью направляющих 7.9 висит на траверзе 78, прикрепленной к канату 29 и находящейся в верхнем положении.
На рукоятку 7 7 зажимного эксцентрика 9 давит кулачок 77, благодаря чему зажимной эксцентрик 9 находится в раскрытом (холостом) положении.
2.Захват на канате 2,9 опускается на груз 26 для соединения с ним (фиг. 2). Подвеска 4, достигнув поверхности груза 26, останавливается, а траверза 7 под действием силы своего веса продолжает движение вниз и поворачивает захватывающие челюсти 3 до полного зажима ими груза 26. При дальнейщем освобождении каната 29 траверза 78 и вместе с ней траверза 7 опускаются вниз до соприкосновения с подвеской 4 или траверзой 7, что зависит от размера груза. Движение траверзы 78 посредством зубчатой рейки 73 передается шестерне 74 регулировочного приспособления, которая, вращаясь сама, одновременно через посредство собачки 76 и храповик 75 поворачивает на половину оборота и кулачок 77, освобождая таким образом рукоятку 77 зажимного эксцентрика 9, который под действием своего веса наклоняется и зажимает щтангу 5.
3.Подъем захвата вместе с грузом (фиг. 3). Траверза 78 с зубчатой рейкой 73 подымается по направляющим 7.9 и вращает шестерню /4 регулировочного приспособления на половину оборота вхолостую. Зажимной эксцентрик 9 производит полный зажим штанги 5, которая тянет подBiCKv 4 вместе с захватывающими челюстями вверх, отчего челюсти 3, стремясь повернуться на осях 27, зажимают своими рабочими илечами груз 26, и последний отрывается от земли.
4. Захват с грузом 20 опускается на землю (фиг. 4), при достижении которой он опирается на поверхность груза 26 и благодаря люфтам в систед1е разгружает штангу 5 от растягивающей силы. При этом траверза 18 с зубчатой рейкой 73 опускается по направляющим 19 и вращает щестерню 14 регулировочного приспособления. Кулачок 77 давит на рукоятку 77 зажимного эксцентрика 9 и переводит его в нерабочее положение. При подъеме механизма вверх он принимает положение, показанное на фиг. 1, т. е. находится во взведенном состоянии. Таким образом механизм, работая в четыре такта, обеспечивает автоматизацию процессов захватывания, удержания на весу и освобождения грузов.
Фиг. 1
9
ТТЛ
Последовательность тактов регулируется крановщиком посредством подъемного каната, наматываемого на барабан подъемной лебедки.
Предмет изобретения
Одноканатный крановый захват для грузов заключающий в себе челюсти, щарнирно смонтированные на траверзе и щарнирно сочлененные с вертикально подвижной подвеской, автоматически соединяемой со второй траверзой, выполненной вертикально подвижной относительно первой и несущей на себе поворотный рычажок, находящийся под воздействием противовеса и осуществляющий это соединение, отличающийся тем, что для поворота рычажка применен кулачок, смонтированный на храповом колесе, связанном посредством собачки с соосной с ним шестерней, сцепленной с рейкой, укрепленной на третьей траверзе, вертикально подвижной относительно второй и подвешенной к канату.
Фиг. 2
9
г-п IS
-13
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для мытья, ополаскивания и сушки бутылок | 1927 |
|
SU25415A1 |
| МАШИНА ДЛЯ ОБВЯЗЫВАНИЯ ТЮКОВ ПОЛОСОВЫМ ЖЕЛЕЗОМ | 1930 |
|
SU38583A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Устройство для съема бобин на ватерах | 1934 |
|
SU44470A1 |
| Устройство для укладки упаковок в тару | 1985 |
|
SU1504166A1 |
| Счетное устройство для обрезных и полуобрезных досок и тому подобных материалов | 1935 |
|
SU47425A1 |
| Автоматический железнодорожный тормоз с электромагнитным управлением | 1930 |
|
SU26722A1 |
| ПЕРЕКЛЮЧАТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПЕРЕМЕННО-ВОЗВРАТНОГО ДВИЖЕНИЯ СТОЛА ШЛИФОВАЛЬНОГО СТАНКА | 1926 |
|
SU20979A1 |
| Ведущий механизм к врубовым машинам | 1932 |
|
SU40804A1 |
| Приспособление к крану для транспортирования и кантовки листового материала | 1939 |
|
SU59754A1 |