:54) ПРИВОД ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОЙ МАШИНЫ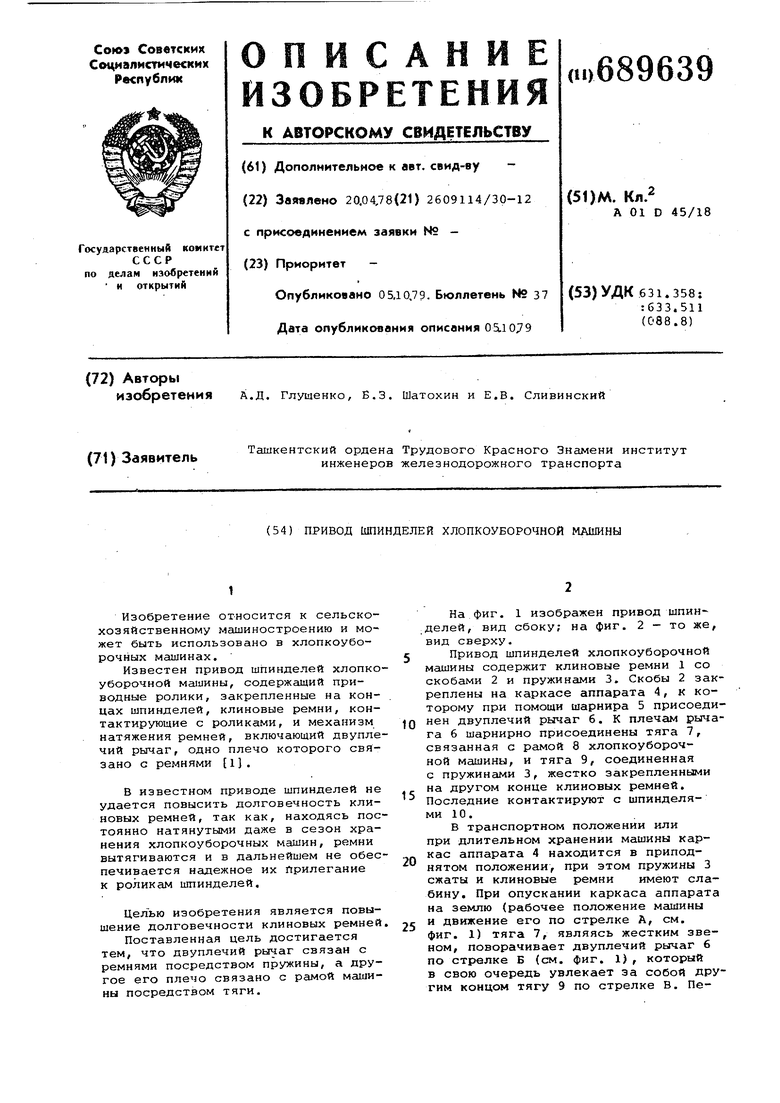
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод прямого вращения шпинделей вертикального хлопкоуборочного аппарата | 1984 |
|
SU1230523A1 |
| Привод шпинделей хлопкоуборочного барабана | 1984 |
|
SU1217293A1 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1986 |
|
SU1519571A1 |
| Привод шпинделей хлопкоуборочного аппарата | 1986 |
|
SU1367903A1 |
| Привод шпинделей хлопкоуборочного барабана | 1984 |
|
SU1335170A1 |
| Молотильное устройство | 1978 |
|
SU735214A1 |
| Хлопкоуборочный аппарат | 1990 |
|
SU1761032A2 |
| Клиноременный вариатор механизма подачи основных нитей на ткацком станке | 1980 |
|
SU990901A1 |
| ПРИВОД ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОГО АППАРАТА | 1972 |
|
SU351496A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗАЗОРОВ В НИЖНИХ ОПОРАХ ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОГО АППАРАТА | 1971 |
|
SU306812A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в хлопкоуборочных машинах.
Известен привод шпинделей хлопкоуборочной машины, содержащий приводные ролики, закрепленные на концах шпинделей, клиновые ремни, контактирующие с роликами, и механизм натяжения ремней, включающий двуплечий рычаг, одно плечо которого связано с ремнями 1.
В известном приводе шпинделей не удается повысить долговечность клиновых ремней, так как, находясь постоянно натянутыми даже в сезон хранения хлопкоуборочных машин, ремни вытягиваются и в дальнейшем не обеспечивается надежное их Прилегание к роликам шпинделей,
Целью изобретения является повышение долговечности клиновых ремней.
Поставленная цель достигается тем, что двуплечий рычаг связан с ремнями посредством пружины, а другое его плечо связано с рамой машины посредством тяги.
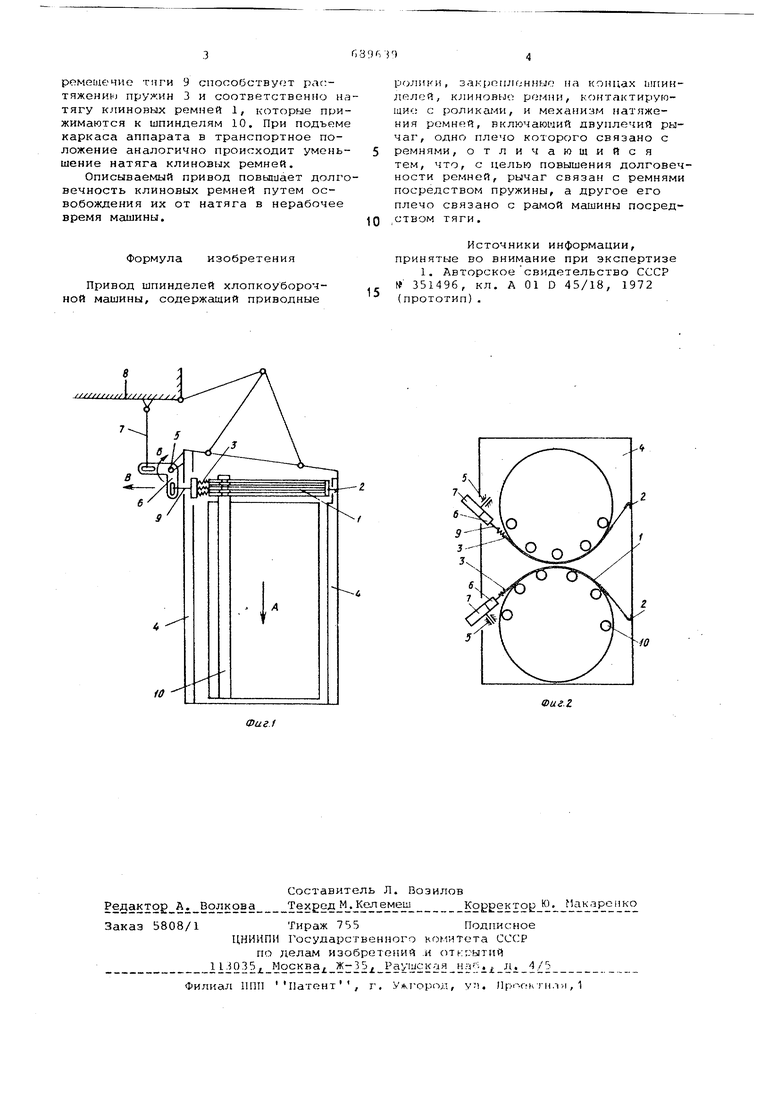
На фиг. 1 изображен привод шпин ,делей, вид сбоку; на фиг. 2 - то же, вид сверху.
Привод шпинделей хлопкоуборочной машины содержит клиновые ремни 1 со скобами 2 и пружинами 3. Скобы 2 закреплены на каркасе аппарата 4, к которому при помощи шарнира 5 присоединен двуплечий рычаг 6. К плечам рыча0га 6 шарнирно присоединены тяга 7, связанная с рамой 8 хлопкоуборочной машины, и тяга 9, соединенная с пружинами 3, жестко закрепленньдми на другом конце клиновых ремней.
5 Последние контактируют с шпинделями 10.
В транспортном положении или при длительном хранении машины каркас аппарата 4 находится в припод0нятом положении, при этом пружины 3 сжаты и клиновые ремни имеют слабину. При опускании каркаса аппарата на зе2илю (рабочее положение машины и движение его по стрелке А, см.
5 фиг. 1) тяга 7, являясь жестким звеном, поворачивает двуплечий рычаг 6 по стрелке Б (см. фиг. 1), который в свою очередь увлекает за собой другим концом тягу 9 по стрелке В. Перемешечие тиги 9 способствует рас:тяжениь) 3 и соответственно натягу клиновых ремней 1, которые прижимаются к шпинделям 10. При подъеме каркаса аппарата в транспортное положение аналогично происходит уменьшение натяга клиновых ремней.
Описываемый привод повьпиает долховечность клиновых ремней путем освобождения их от натяга в нерабочее время машины.
Формула изобретения
Привод шпинделей хлопкоуборочной машины, содержащий приводные
реплики, закроплоинып на концах шпинделей, KJiHHOBtJo ремни, контактирующие; с рюликами, и механизм натяжения ремней, включающий двуплечий рычаг, одно плечо которого связано с ремнями, отличающийся тем, что, с целью повышения долговечности ремней, рычаг связан с ремнями посредством пружины, а другое его плечо связано с рамой машины посред ством тяги.
Источники информации, принятые во внимание при экспертизе
