(54) МЕХАНИЗМ ВЫТАЛКИВАНИЯ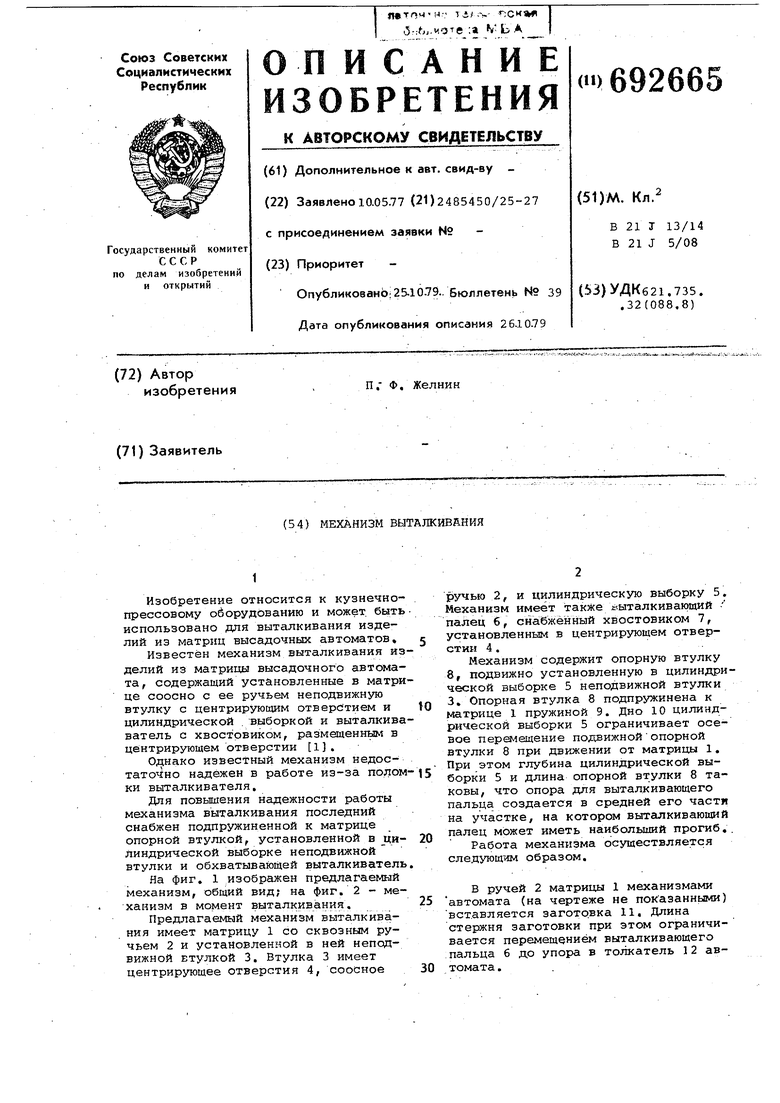
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изготовления осесимметричных полых ступенчатых деталей | 1990 |
|
SU1790463A3 |
| Одноударный холодновысадочный автомат | 1980 |
|
SU984602A1 |
| ДВУХУДАРНЫЙ ХОЛОДНОВЫСАДОЧНЫЯ АВТОЛУАТ | 1973 |
|
SU365876A1 |
| ЗОЮЗНАЯ \Ь;;,П:НТй^-|?ШМ?04(Ц 1^нЬЛуТЕНД- j | 1972 |
|
SU331839A1 |
| Холодновысадочный автомат | 1984 |
|
SU1281330A1 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ИЗДЕЛИЙ | 1970 |
|
SU261151A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Роторный автомат | 1988 |
|
SU1586838A1 |
| Холодновысадочный автомат для изготовления полупустотелых заклепок | 1989 |
|
SU1632599A1 |
| Холодновысадочный автомат | 1978 |
|
SU710740A1 |
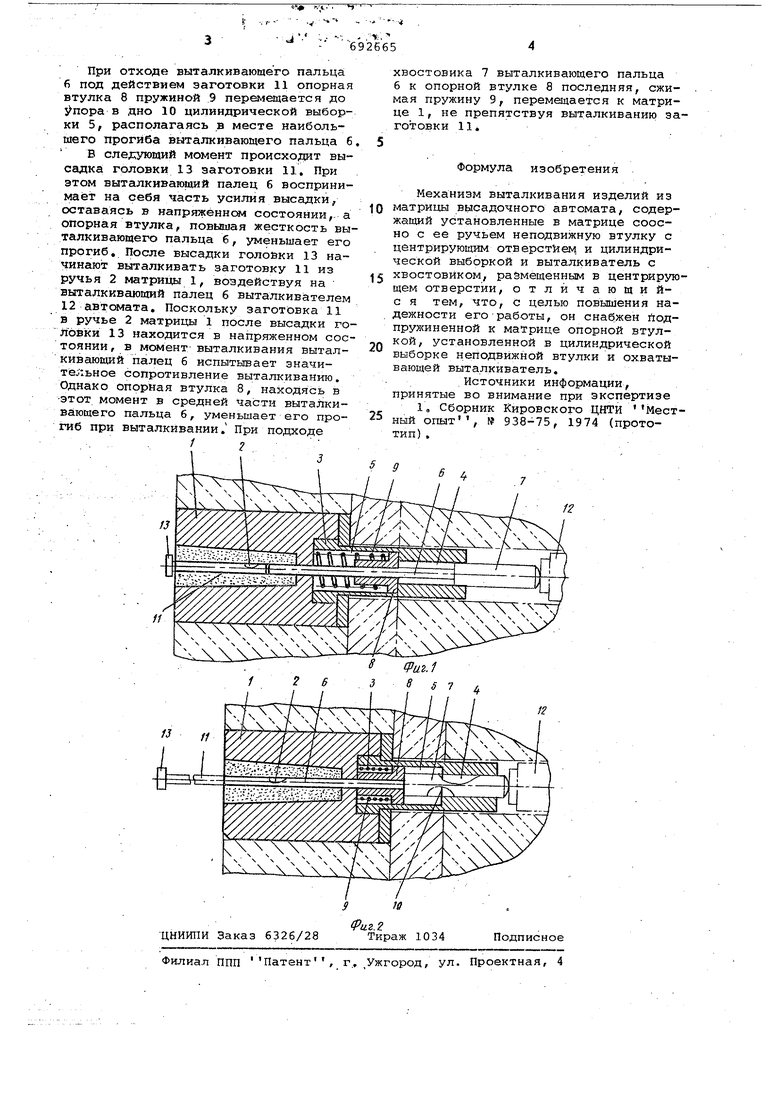
Изобретение относится к кузнечнопрессовому оборудованию и может, быть использовано для выталкивания изде-лий из матриц высадочных автоматов, Известен механизм выталкивания из делий из матрицы высадочного автомата, содержащий установленные в матри це соосно с ее ручьем неподвижную втулку с центрирующим отверстием и цилиндрической .выборкой и выталкива ватель с хвост овиком, размещенным в центрирующем отверстии 1. Од ;нако известный механизм недостаточно надёжен в работе из-за полом ки выталкивателя. Для повышения надежности работы механизма выталкивания последний снабжен подпружиненной к матрице опорной втулкой, установленной в цилиндрической выборке неподвижной втулки и обхватывающей выталкиватель На фиг. 1 изображен предлагаемый механизм, общий вид; на фиг. 2 - механизм в момент выталкивания. Предлагаемый механизм выталкивания имеет матрицу 1 со сквозным ручьем 2 и установленной в ней неподвижной втулкой 3. Втулка 3 имеет центрирующее отверстия 4, соосное ручью 2, и цилиндрическую выборку 5. Механизм имеет также «ыталкивающий палец 6, сна бжённый хвостовиком 7, установленным в центрирующем отверстии 4 . Механизм содержит опорную втулку 8, подвижно установленную в цилиндрической выборке 5 неподвижной втулки 3, Опорная втулка 8 подпружинена к матрице 1 пружиной 9. Дно 10 цилиндрической выборки 5 ограничивает осевое перемещение подвижнойопорной втулки 8 при движении от матрицы 1. При этом г.яубина цилиндрической выборки 5 и длина опорной втулки 8 таковы, что опора для выталкивающего пальца создается в средней его части на участке, на котором выталкивающий палец может иметь наибольший прогиб.. Работа механизма осуществляется следующим образом. В ручей 2 матрицы 1 механизмами автомата (на чертеже не показанными) вставляется заготовка 11, Длина стержня заготовки при этом ограничивается перемещением выталкивающего пальца 6 до упора в то.га атель 12 автомата.
