(О 11 Изобретение относится к автоматическому управлению и может быть использовано для наблюдения за перемен ными состояниями объектов управления, в которых в процессе работы имеют место изменение параметров объекта и/или действие возмущений, например, 3 роботостроении в системах автомати ческого управления приводами рабочих органов манипуляционных роботов, в станкостроении в системах автомати ческого управления приводами главного движения металлорежущих станков, в металлургии в системах автоматичес кого управления приводами прокатных станов. Известно устройствр для идентификации линейных динамических объектов содержащее две модели, входы которых связаны с соответствукяцими входами устройства, а выходы - с соответствующими входами блока формирования ошибки настройки, и блок интеграторов, выходы которого связаны с соответствующими настроечными входами моделей, последовательно соединенные корреляторы и фильтры-предикаторы Cl Однако устройство идентификации при изменении параметров не обеспечивает требуемую точность идентифика ции объекта. Кроме того,из-за наличия двух моделей, коррелятора и предикаторов возникают затруднения в обеспечении условий устойчивости устройства. Известно также устройство для идентификации линейного объекта, содержащее задатчик масштабных коэффициентов, последовательно соединенные первый блок множителей, первый сумма тор, второй сумматор и блок деления, выход которого соединен с первыми входами первого блока множителей, вторые входы которого через последовательно соединенные блок квадраторов и третий сумматор соединены с вторым входом блока деления, выход объекта идентификации соединен с вто рым входом второго сумматора, а входы третьего и четвертого блоков умно жения соединены с соответствующими выходами задатчика масштабных коэффициентов t2Il. Однако это устройство идентификации не обеспечивает идентификацию нестационарного линейного объекта при наличии неизмеряемых внешних воз мущений аддитивного характера, так как устройство идентификации рассчи0тано на линейные стационарные объекты . Наиболее близким к изобретению является наблюдающее устройство идентификации, содержащее последовательно соединенные блок коэффициентов, первый блок сумматоров, блок интеграторов и блок сравнения, одним входом соединенный с выходом объекта наблюдения, подключенного своим входом к входу блока коэффициентов, а выход блока интеграторов через блок коэффициентов модели подключен к второ-гу входу первого блока сзжматоров 3. Однако известное наблюдающее устройство идентификации обладает низкой точностью в случае воздействия иа объект идентификации неизмеряемых возмущений, так как оно принципиально рассчитано на функционирование в условиях линейного стационарного объекта, в котором отсутствуют возмущения. Цель изобретения - повьпиение точности устройства наблюдения при наличии неизмеряемых возмущений, действующих на объект наблюдения. Эта цель достигается тем, что в Устройство, содержащее последовательно соединенные блок коэффициентов, первый блок сумматоров, блок интеграторов и бпок сравнения, одним входом соединенный с выходом объекта наблюдения, подключенного своим входом к входу блока коэффициентов, а выход блока интеграторов через блок коэффициентов модели подключен к второму входу первого блока сумматоров, дополнительно введены последовательно соединенные блок релейных элементов, блок фильтров и второй блок сумматоров, причем выход блока сравнения через блок релейных элементов соединен с третьим входом первого блока сумматоров, а второй и третий входы второго блока сумматоров подключены соответственно к выходам блока коэффициентов модели и блока коэффициентов . На чертеже представлена блоксхема предлагаемого устройства наблюдения. Устройство содержит блок 1 коэффициентов, первый блок 2 сумматоров, блок 3 интеграторов, блок А сравнения, объект 5 наблюдения, блок 6 коэффициентов модели, блок 7 релейных элементов, блок 8 фильтров и второй блок 9 сумматоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1153314A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Электропривод постоянного тока | 1981 |
|
SU1050075A1 |
| Устройство для идентификации линейных динамических объектов | 1977 |
|
SU693342A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU935875A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Устройство для стабилизации положения плазменного шнура в токамаке | 1986 |
|
SU1418817A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Система идентификации колебаний присоединенного к объекту упругого элемента с дискретно изменяемой жесткостью | 1988 |
|
SU1543384A1 |
УСТРОЙСТВО НАБЛЮДЕНИЯ, содержащее последовательно соединенные блок коэффициентов, первый блок сумматоров, блок интеграторов и блок сравнения, одним входом соединенный с выходом объекта наблюдения, подключенного своим входом к входу блока коэффициентов, а выход блока интеграторов через блок коэффициентов модели подключен к второму входу первого блока сумматоров, отличающееся тем, что, с целью повыщения точности устройства, в него дополнительно введены последовательно соединенные блок релейных элементов, блок фильтров и второй блок сумматоров, причем выход блока сравнения через блок релейных элементов соединен с третьим входом первого блока сумматоров, а второй и третий (Л входы второго блока сумматоров подС ключены соответственно к выходам блока коэффициентов модели и блока коэффициентов.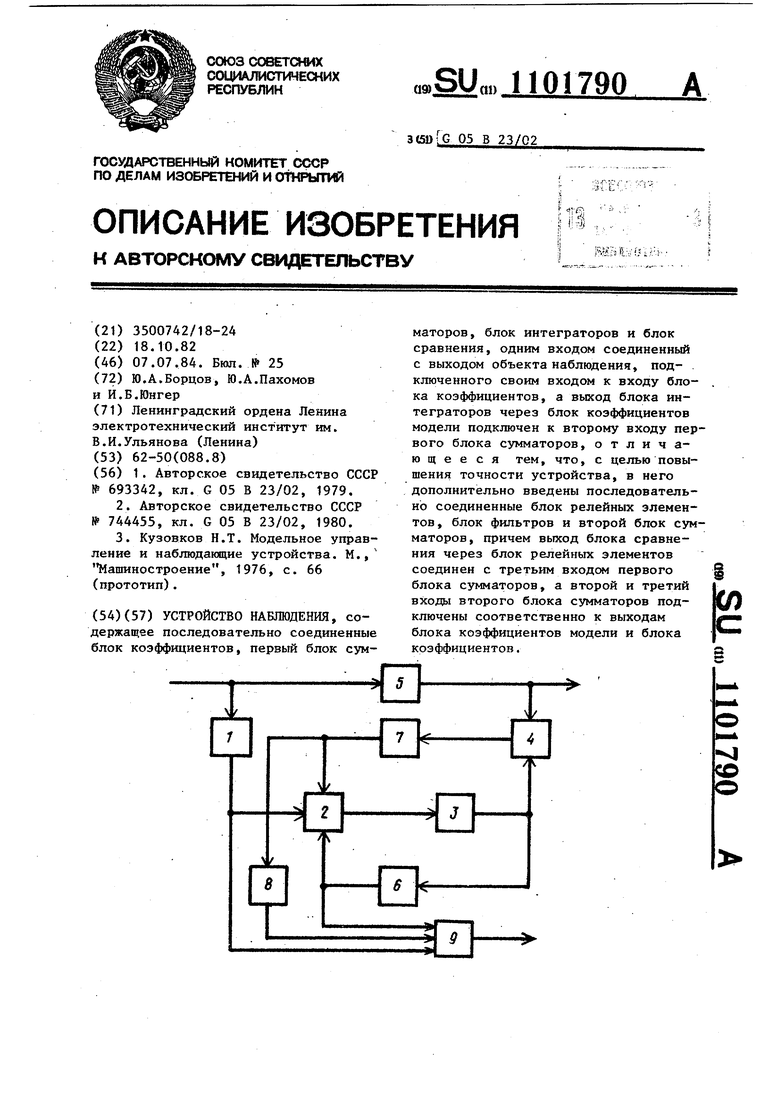
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для идентификации линейных динамических объектов | 1977 |
|
SU693342A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Модельное управление и наблюдающие устройства | |||
| М., Машиностроение, 1976, с | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
