Изобретение относится к движителям для моторных повозок, содержащим переставные полозья, сопряженные со штоками поршней, перемещаемых под действием жидкости или упругой среды в цилиндрах, смонтированных на корпусе повозки с возможностью качания их в вертикальной плоскости.
Настоящий движитель предназначен преимущественно для экскаваторов и отличается тем, что шток одного цилиндра сочленен с двуплечим, смонтированным на кузове повозки, рычагом, второе плечо которого сочленено с верхним концом качалки, своим нижним концом сочлененной с полозом, а в ее промежуточной точке - со штоком второго цилиндра.
Первый цилиндр целесообразно располагать над задним по ходу повозки концом двуплечего рычага, а второй цилиндр - впереди качалки.
Второй цилиндр может быть снабжен дросселем, обеспечивающим перетекание рабочей среды из одной полости этого цилиндра в другую в конце каждого перемещения корпуса повозки.
Для питания цилиндров каждого полоза рабочей жидкостью может быть применен отдельный насос.
В устройстве может быть использован механизм для выравнивания давлений в обоих цилиндрах, который целесообразно осуществить в виде обратных клапанов, сообщающих насосы со сливной трубой и автоматически управляемых сервомотором, рабочие полости которого сообщены одна с одним насосом, a вторая - с другим.
Сервомотор может быть выполнен в виде цилиндра с поршнем, который снабжен каналом, сообщающим между собой обе полости сервомотора, и нагружен с обеих сторон пружинами.
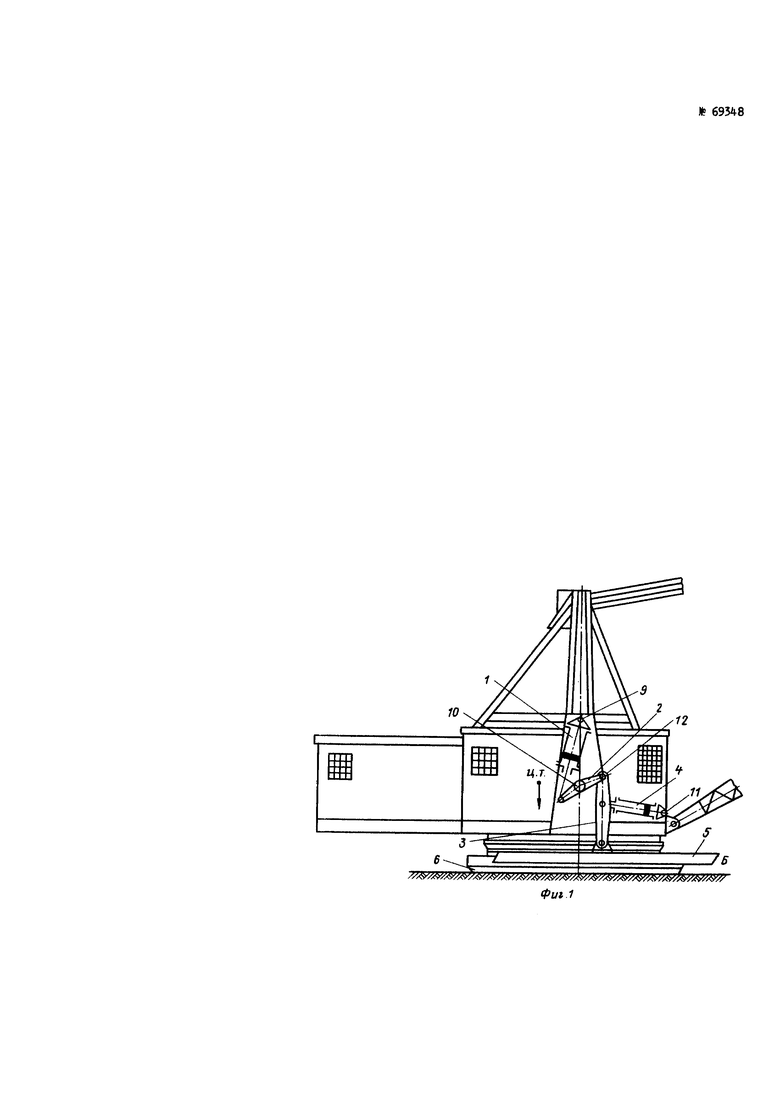
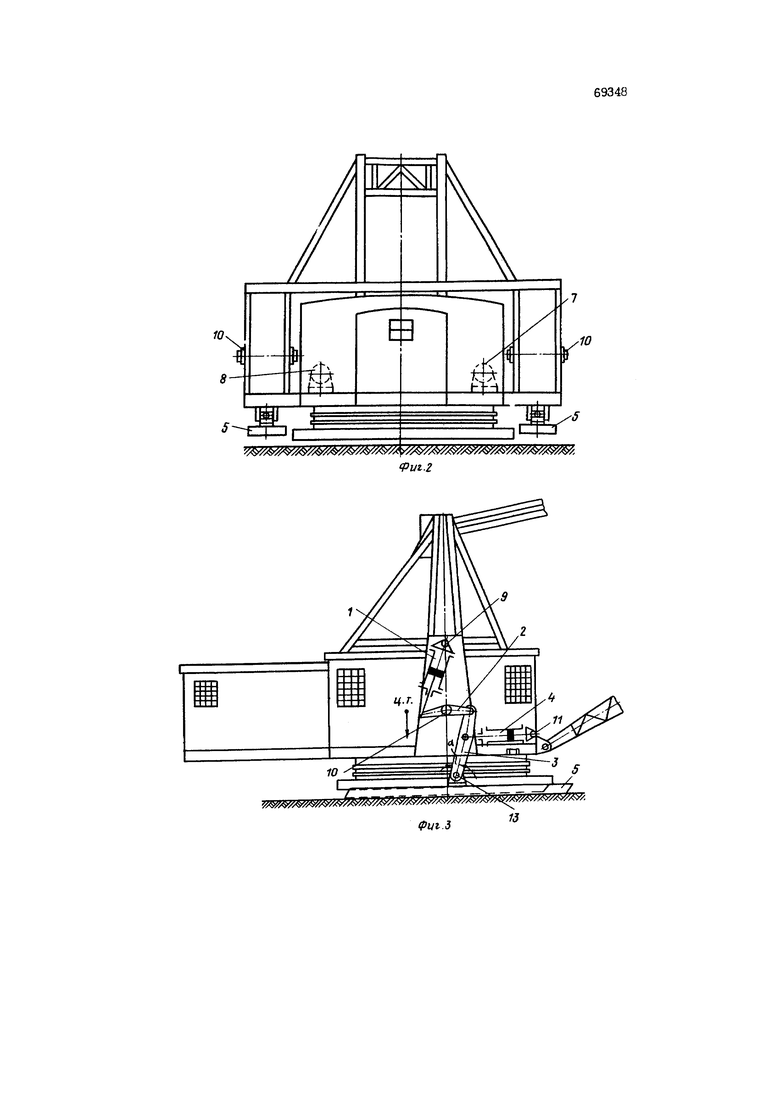
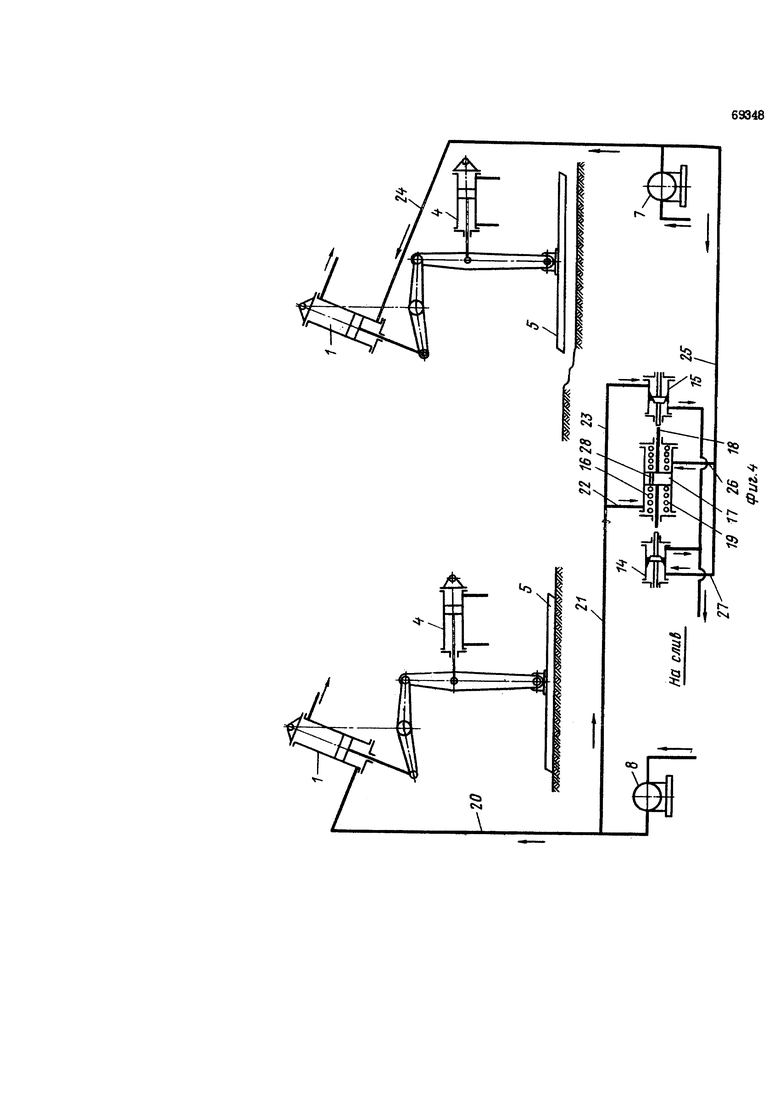
На фиг. 1 и 2 схематически изображен предлагаемый движитель в рабочем положении экскаватора; на фиг. 3 - то же, во время перемещения; на фиг. 4 - кинематическая схема движителя с механизмом для выравнивания давления в цилиндрах.
Движитель содержит два цилиндра 1, два двуплечих рычага 2, две качалки 3, два цилиндра 4, два полоза 5, опорную базу 6 и два насоса 7 и 8.
Цилиндры 1 шарнирно подвешены на оси 9, двуплечие рычаги 2 - на оси 10 и цилиндры 4 - на оси 11.
Оси 9, 10 и 11 жестко связаны с поворотной частью экскаватора. С задними концами двуплечих рычагов 2 шарнирно связаны нижние концы штоков цилиндров 1, а с передними концами - верхние концы качалок 3, нижние концы которых шарнирно сочленены с полозами 5.
Штоки цилиндров 4 шарнирно прикреплены к качалкам 3 на некотором расстоянии от их верхних концов. Цилиндры 1 расположены над задними по ходу экскаватора концами рычагов 2, а вторые цилиндры 4 - впереди качалок 3.
Все полости цилиндров 1 и 4 заполнены упругой средой (рабочей жидкостью).
В рабочем положении экскаватора поршни цилиндров 1 занимают крайнее нижнее, а поршни цилиндров 4 - крайнее переднее положение. Полозы 5 приподняты и экскаватор может поворачиваться вокруг своей вертикальной оси на угол ±360°.
Для перемещения экскаватора на другое место стрелу устанавливают в требуемом направлении, включают насосы и подают рабочую жидкость под давлением в нижние полости рабочих цилиндров (насос 8 - в левый цилиндр 1, насос 7 - в правый цилиндр 1). Поршни со штоками под давлением жидкости перемещаются вверх, поворачивая рычаги 2 по часовой стрелке. Качалки 3 вместе с передними концами двуплечих рычагов 2 и полозами 5 будут спускаться вниз до соприкосновения последних с почвой.
После этого верхние концы качалок 3 остаются неподвижными, а двуплечие рычаги 2 поворачиваются вокруг шарниров 12 и тем самым будут поднимать экскаватор вверх. Так как центр тяжести экскаватора находится позади шарниров 13 качалок, экскаватор будет подниматься вверх своей передней частью и поворачиваться вокруг задней кромки опорной базы 6. После того, как передняя кромка опорной базы поднимется на требуемую высоту, в передние полости цилиндров 4 подают жидкость под давлением, достаточным для того, чтобы дать экскаватору поступательное движение вперед.
По мере передвижения экскаватора качалки 3 поворачиваются вокруг нижних неподвижных шарниров 13 в сторону движения, образуя с вертикалью угол α. С отклонением качалок 3 от вертикали на некоторый угол α дальнейшее движение экскаватора происходит под действием собственного веса, так как последний раскладывается на усилие, направленное вдоль качалок, и на горизонтальное усилие, увлекающее экскаватор вперед.
С этого момента давление жидкости в передних полостях цилиндров 4 прекращается, а жидкость из задних полостей вытекает через регулируемые дроссели, которые обеспечивают экскаватору равномерное движение и плавную посадку в конце шага.
Регулируя промежуток времени между началом подачи жидкости в нижние полости цилиндров 1 и передние полости цилиндров 4, а также вытекание жидкости из задних полостей цилиндров 4, можно передвигать экскаватор по любой траектории, поднимая переднею часть его от минимальной до максимальной высоты.
При движении экскаватора по неровной местности один полоз его может опираться на почву, а другой - отстоять от почвы на некоторой высоте h.
Та сторона, у которой, опорный башмак упрется в почву, начнет подниматься вверх, другая сторона остается на месте. Вследствие этого экскаватор перекосится на одну сторону и перекос будет тем больше, чем больше высота h. Такое положение вызовет дополнительные усилия в несущихся частях экскаватора, которые могут перейти предел допустимых усилий и вызвать поломки и аварии.
Механизм, изображенный на фиг. 4, устраняет указанный недостаток и позволяет экскаватору передвигаться по пересеченной местности.
Механизм выполнен в виде обратных клапанов 14 и 15, сообщающих насосы со сливной трубой. Клапаны автоматически управляются сервомотором, выполненным в виде цилиндра 16 с поршнем 17 и штоками 18. Поршень 17 удерживается в среднем положении цилиндра 16 двумя одинаковыми пружинами 19. Левая полость цилиндра 16 через трубопроводы 20-23 сообщается с нижней полостью левого цилиндра 1 насосом 7 и правым клапаном 15, правая полость - через трубопроводы 24-27 с нижней полостью правого цилиндра 1 насосом 8 и левым клапаном 14.
Если один из башмаков вследствие неровности местности упирается в почву раньше другого, то давление жидкости под поршнем цилиндра 1 быстро возрастает и передается в одноименную полость цилиндра 16, передвинув поршень 17 в противоположную сторону. Конец штока 18 открывает клапан, соединенный с полостями указанных цилиндров, и насос работает на слив до тех пор, пока второй полоз не дойдет до земли. После того, как оба полоза упрутся в землю, давление жидкости в нижних полостях цилиндров 1 и обеих полостях цилиндра 16 сравняется. Поршень 17 занимает среднее положение, оба клапана закрываются, жидкость от насосов проходит в нижние полости цилиндров 1, и обе стороны экскаватора поднимаются параллельно без перекоса.
Небольшое отверстие 28 в поршне 17 сообщает обе полости цилиндра 16, обеспечивая среднее положение поршня 17 во время нормальной работы экскаватора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК-КАЧАЛКА | 2007 |
|
RU2417330C2 |
| ТЕПЛООБМЕННАЯ СИСТЕМА, ИСПОЛЬЗУЮЩАЯ ТЕПЛОВЫЕ НАСОСЫ (ВАРИАНТЫ) | 2011 |
|
RU2474770C2 |
| Движитель для моторных повозок, преимущественно для экскаваторов | 1948 |
|
SU76031A2 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2455526C1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ ФОРМОВКИ ПОДОШВ, СТЕЛЕК И ТОМУ ПОДОБНЫХ ОПЕРАЦИЙ | 1938 |
|
SU60813A1 |
| Самоходный многорядный картофелеуборочный комбайн | 1990 |
|
SU1811772A1 |
| Ходовая часть гусеничного транспортного средства | 1991 |
|
SU1808755A2 |
| ПРИБОР ДЛЯ БУКСОВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ПОВОЗОК | 1930 |
|
SU21227A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ГИДРАВЛИЧЕСКОГО, НАПРИМЕР, ВУЛКАНИЗАЦИОННОГО ПРЕССА | 1941 |
|
SU64811A1 |
| СИСТЕМА ГИДРАВЛИЧЕСКОГО ПРИВОДА ДЛЯ МАСЛЯНОГО НАСОСА ДЛЯ СКВАЖИН | 1993 |
|
RU2117823C1 |
1. Движитель для моторных повозок, преимущественно для экскаваторов, содержащий переставные полозья, сопряженные со штоками поршней, перемещаемых под действием жидкости или упругой среды в цилиндрах, смонтированных на корпусе повозки о возможностью качания их в вертикальной плоскости, отличающийся тем, что шток одного цилиндра сочленен с двуплечим, смонтированным на кузове повозки рычагом, второе плечо которого сочленено с верхним концом качалки, своим нижним концом сочлененной с полозом, а в ее промежуточной точке - со штоком второго цилиндра.
2. Форма выполнения движителя по п. 1, отличающаяся тем, что первый цилиндр расположен над задним по ходу повозки концом двуплечего рычага, а второй цилиндр - впереди качалки.
3. Форма выполнения движителя по пп. 1 и 2, отличающаяся тем, что второй цилиндр снабжен дросселем, перемещающим рабочую среду из одной полости этого цилиндра в другую в конце каждого перемещения корпуса повозки.
4. Движитель по пп. 1-3, отличающийся тем, что для питания рабочей средой цилиндров каждого полоза применен отдельный насос.
5. Форма выполнения движителя по п. 1, отличающаяся применением механизма для выравнивания давлений в обоих цилиндрах.
6. Форма выполнения движителя по п. 5, отличающаяся тем, что механизм выполнен в виде обратных клапанов, сообщающих насосы со сливной трубой и автоматически управляемых сервомотором, рабочие полости которого сообщены одна с одним насосом, а вторая - с другим.
7. Форма выполнения движителя по п. 6, отличающаяся тем, что сервомотор представляет собой цилиндр с поршнем, который снабжен каналом, сообщающим между собой обе полости сервомотора, и нагружен с обеих сторон пружинами.
