3
элементе с управляемым приводом переключа roinero флажка, взаимодеГтствующсго е путевыми датчиками, и упора, взаимодействующего с подвижиыми частями и механически связанпого с дистаицпопиой синхронной передачей.
Устройство контроля пижнего положения подвпл пых частей вьшолиеио в виде сельсшьдатчика, дистаппиоииой сиихроииой передачи и иодиружииеппой рейки, мсхр.пическ связаниой передачей, иаиример зубчатой, е валом се.пьсипа-датчика, диетанпис;: иой еиихрониой передачи, емоитироваипых с возможиоетью иеремси1епия отиосител1 | о станины, а также закреп.чеипого иа подвижных частях уиора, взаимодействуюидего е подиружинеииой площадкой и подируж ненным грузом, взаимодействующим с подпружинеиной рейкой.
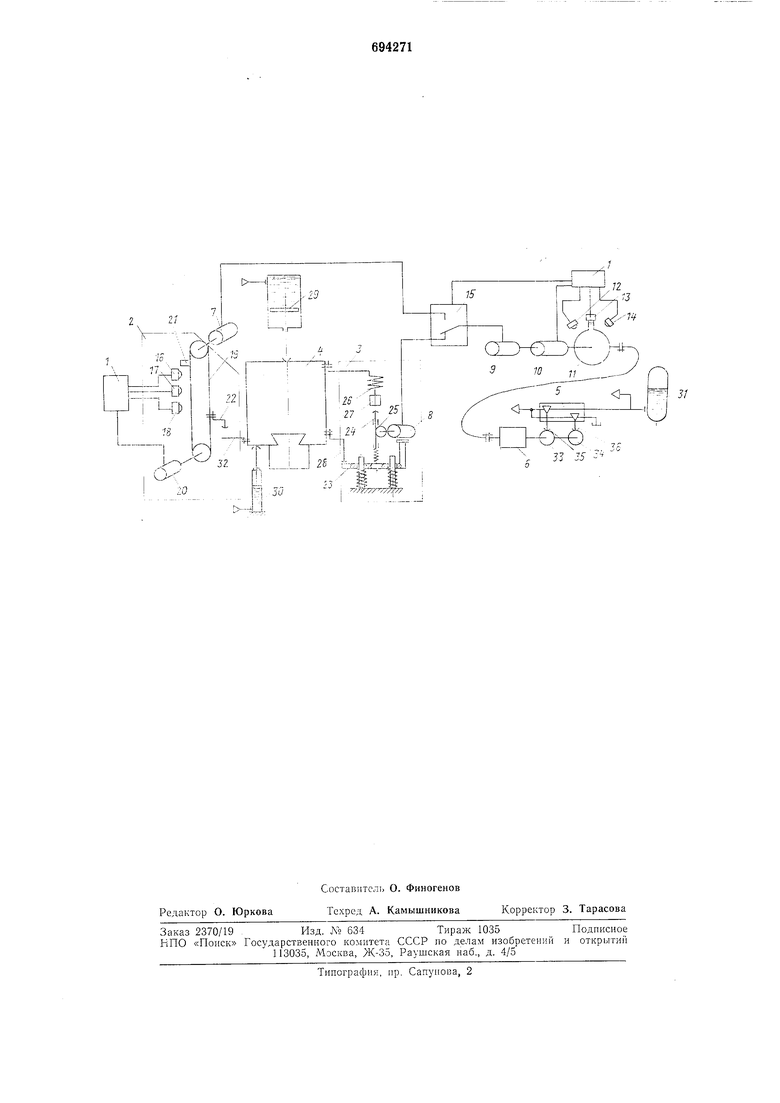
На чертеже нредставлена предлагаемая система нрограммпого управлеппя кузнечио-преесовыми машииамп ударного действия.
Она содержит логическую евязь I, куда входят как органы управления (кнопки, переключатели), так п логические элементы, а также программопоситель, соединеппые с ией программиое устройство 2 контроля верхнего положения и устройство 3 коитроля нижнего положеиия иодвижпых частей 4, раепределптель 5 энергоносителя, мехаппчески евязаппый с ним гидравлический илп нневматнчеекий уснлптелт) моментов б, соеднненный дистанцгюнпой синхроипой передачей, папрпмер, посредством cejibсги(-датчиков 7 и 8 и сельсин-ириемника 9 с устройствами 2 п 3 контроля Bepxneio и нижнего ноложепий рабочего органа 4. С валом сельсин-приемпика 9 жестко связапы двигатель управления 10 и устройство индикации иоложеиия раенределителя по положению вала усилителя моментов 6, состоящее из диска 11 с выстуиом и устаиовленных по периферии иоследпего путевых датчиков 12, 13 и 14, соединенных с логической частью 1 системы. Сельсии-датчики 7 п 8 соедипепы е сельеии-приемппком 9 через переключатель 15. Логическая часть 1 системы соедииена е переключателем 15 п двигателем управлепия 10.
Устройство 2 коитроля верхнего положеппя подвпжиых чаетей 4 еодержит закреиленные иа различной высоте путевые датчики 16, 17, 18 (число их выбирается в завнеимоети от технологических требований, иредъяв.чяемых к программному уетройству), соедипенпые е логической частью 1 еиетемы, а также устаповленные иа по; вижиом элементе 19 е нрнводом 20 нереключаЮ(пий флажок 21 для путевых датчиков 16, 17, 18, а также унор 22. Привод 20 соедииеи с логической частью 1, а подвижный элемент 19 механически связан с сельсиндатчиком 7 дистаригнопной )едачи.
Устройство контроля 1П жие1о положения
подвил пых частей 4 содержит подпружииенну 0 п.лопдадку 23. ira которой е.моичировапы нодиружпиеипая рейка 24 и сельенндатчик 8, евязаиные между собой механичеекой, например зубчатой, передачей 25, а также закреплеиные иа подвижных частях 4 пружииу 26 с грузом 27 и упор 28. Подвижпые части механическн связаны с ци;|индром привода 29 и возвратным пилиндpovi 30, которые соед1И1ены еоответствеппо с распредел ггелем Эмергоносителя 5 и источ1П1ком 31 энергоносителя. Кроме того, па подвижных частях 4 закренлеп кропнгтейп 32. В случае вынолисчшя распределителя 5
клагкянным (как это изображено на чертеже) последний может бьпь связан е усилите.ле.м моментов 6 посредством кулачков 33 и 34 и толкателей 35 и 36. Предлагаемая еиетема работает следующим образом.
В исходном состоянии (перед ударом) иодвижпые чаетп 4 иаходятея в верхпем положеппи, управляющий выступ диска 11 находится в зазоре среднего бесконтактного
выключателя 13, при этом рабочая полоеть цилиндра привода 29 разобщена распределите.чем 5 как со слпвом, так и с источником 31 энергоиосителя. По комапде онератора (или программоносителя) еигнал от
логической части 1 поступает на двщатель управлепия 10, который поворачивает диск II до момента, нока его уиравляющий выступ не войдет в зазор бесконтактного выклЕочателя 14. При новороте диека 11 от
усилителя моментов 6 иолучают вращение кулачки 33 и 34, которые воздействуют иа толкатели 35 и 36 таким образом, что эпергоноситель от источника 31 поступает в рабочую полоеть цилиндра иривода 29, под
действием которого подвижные части 4 получают ускоренное перемен1ение вниз. В некоторый момент своего движения вниз, до соудареппя с обрабатываемой заготовкой (па чертеже не показана), упор 28, закрепленный на нодвижиых частях 4, входит в сонрикоеповение с подир жипеиной площадкой 23 уетройетва 3 контроля ппжнего полол епия, перемещая последнюю вниз. При соударении иодвижных частей 4 с обрабатываемой заготовкой последний, а вместе с ннм п плон1,адка 23 начипают замедляться, тогда как гр)з 27, подвешеппый на пружине 26, ио иперпии практически со скоростью, нредществующей моменту еоудареиия, иеремещаетея вннз, входит в контакт с рейкой 24, перемещая ее вниз относительно площадки 23. от рейки 24 через мехаиическую иередачу передаются сельсин-датчику 8 дистанционной иередачи,
который через переключатель 15 передает вращепие сельснп-пркемнпку 9 дистаипиониой иередачи. Вал сельсин-приемника 9 поворачивает диск 11 до момента вхол депия его нереключаюпхего выетупа в зазор бескоптактпого выключателя 12, после чего ио
команде от логической части 1 переключатель L5 разрывает цепь сельсин-датчиков 8 и 9 и соединяет сельсин-приемник 9 с сельсин-датчиком 7.
При описанном выше повороте диска 1 распределитель 5 последовательно перекрывает передачу энергоносителя от источника 31 к цилиндру привода 29, а затем соединяет последний со сливом. Возвратный цилиндр 30 под действием давления энергоносителя от источника 31 начинает перемещать нодвнжные части 4 вверх до момента соприкосновения кронн.1тейна 32 с упором 22 программного устройства 2 контроля верхнего ноложения подвижных частей 4. Положение упора 22 устанавливается при движении подвижных частей 4 вниз приводом 20 по команде от логической части 1 до момента вхождения переключающего флажка 21 в зазор одного из путевых датчиков 12, 13 или 14 в соответствии с программой. После соприкосновения кронштейна 32 с упором 22 последний начинает перемешаться вверх вместе с подвижными частями 4, приводя в движение подвижный элемент 19 и механнчески связанный с ним ротор сельснн-датчнка 7.
Сельсин-датчик 7 дистанцион1юй передачи через переключатель 15 приводит во вращение вал сельсин-приемника 9 и связанный с ним диск 11 до момента вхождения его унравляющего выступа в зазор путевого датчика 13. В этом положении рабочая полость цилиндра привода 29 раснределителем 5 разъединяется как со еливом, так и с источником 31, вследствие чего подвижные части 4 останавливаются. Поскольку переключение распределителя 5 в требуемом верхнем положении подвижных частей 4 нроисходит за счет их движения, ностольку обеспечиваются следующие преимущества: скорость подвпжных частей 4 практически не оказывает влияния на путь его торможения и, следовательно, на точность его остановкн (путь «перебега подвпжных частей остается постоянным), раснределитель 5 обеснечивает достаточно плавное раепределеппе эпергоноеителя, что исключает нежелательные переходные процессы в приводе.
Формула и 3 о б р е т е н и я
Система программного унравления кузпечно-пресеовыми мантинами ударного действия, содержан1ая соединенные с логической частьро системы нрограммные устройства контроля верхнего положения и нижпего положения подвижных частей, усилитель, а также приводной распределитель энергоносителя, отличающаяся тем, что, с целью исключения влияния скорости перемещения подвижных частей и временн формирования управляющего воздействия на точность задания энергии удара н время выстоя подвилчных частей в гшжнем положе 1ни, она снабжена дистапцнопж) с нхронной передачей, преимущественно сельс1 нпой, соедпняющей подвижные части с приводом распределителя энергоносителя через программные устройства коЕ1троля их верхнего и положений, при этом привод распределителя выполнен в виде усилителя моментов.
2.Система по п. I, отличающаяся тем, что программное устройство контроля верхнего положения подвижных частей выполнено в виде установленных неподвижно на станине на различной высоте один относительно другого путевых датчиков, соединенных с логической частью системы управления, а также установленной на подвижном элементе с управляемым приводом переключающего флажка, взаимодействующего с путевыми датчиками, и упора, взаимодействующего с подвижными частями и механичеекп связанного с дистанционной синхронной нередачей.
3.Система по н. 1, отличающаяся тем, что устройство контроля нижнего положения подвижных частей выполнено в виде сельспп-датчнка дистанционной синхронной передачи и подпружиненной рейки, механическн связанной нередачей, например зубчатой, с ва.чом сельсин-датчика, дистанционной синхронной передачи, смонтированных с возможностью перемещения относительно станины, а также закрепленного на подвижных частях упора, взаимодействующего с подпружиненной площадкой и подпружиненным грузом, взаимодействующим с подпружиненной рейкой.
Источники информации, принятые во внимание при экспертизе
1.Патент ГДР № 30388, кл. 49g 2, 25.08.64.
2.Патент ФРГ Л° 179461, кл. 58Ь 2, 24.06.57 (прототнп).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ПОДВИЖНОГО УЗЛА СТАНКА | 2007 |
|
RU2339498C2 |
| Правильный пресс | 1978 |
|
SU770602A1 |
| Станок для наложения ленточной изоляции на кольцевые катушки | 1977 |
|
SU663031A1 |
| ДИСТАНЦИОННЫЙ МНОГОКОМПОНЕНТНЫЙ ВЕСОВОЙДОЗАТОР | 1967 |
|
SU198718A1 |
| Путевая машина | 1971 |
|
SU667622A1 |
| Устройство для управления шаговым режимом работы конвейера | 1988 |
|
SU1747359A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ИЗДЕЛИЙ | 1970 |
|
SU264127A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1970 |
|
SU269246A1 |
| УСТРОЙСТВО для ЗАТЯЖКИ и ОСВОБОЖДЕНИЯ КОНТАКТНЫХ ЗАЖИМОВ | 1973 |
|
SU390186A1 |