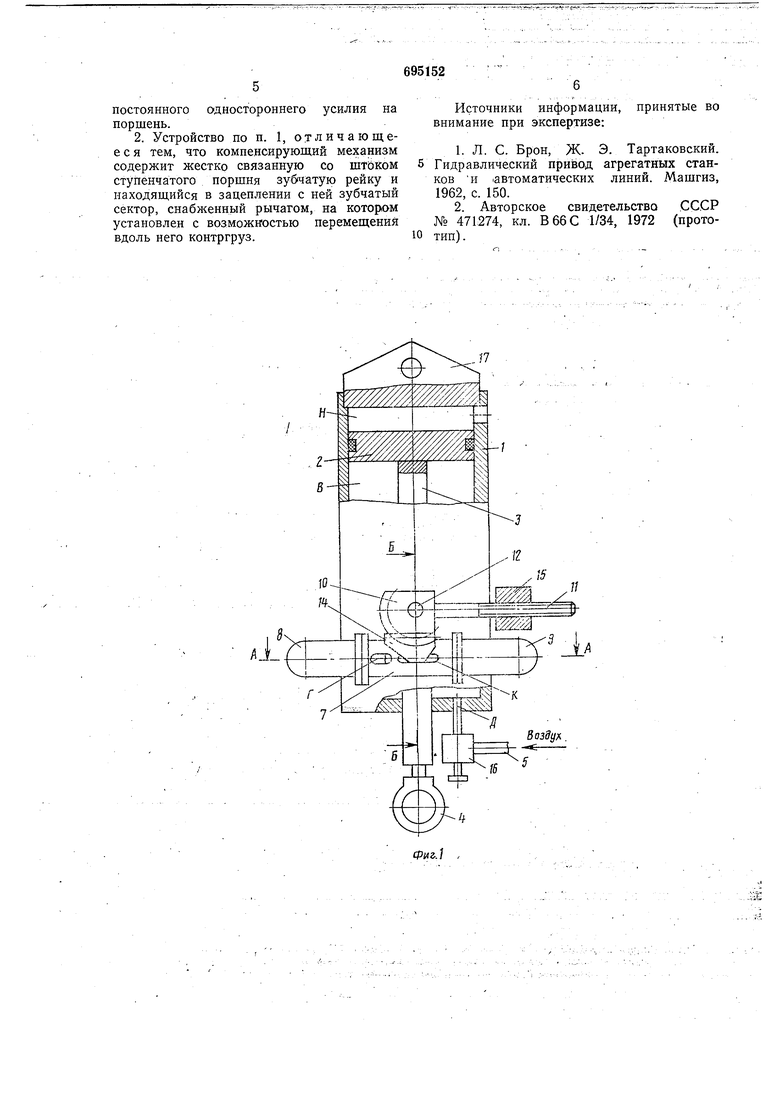
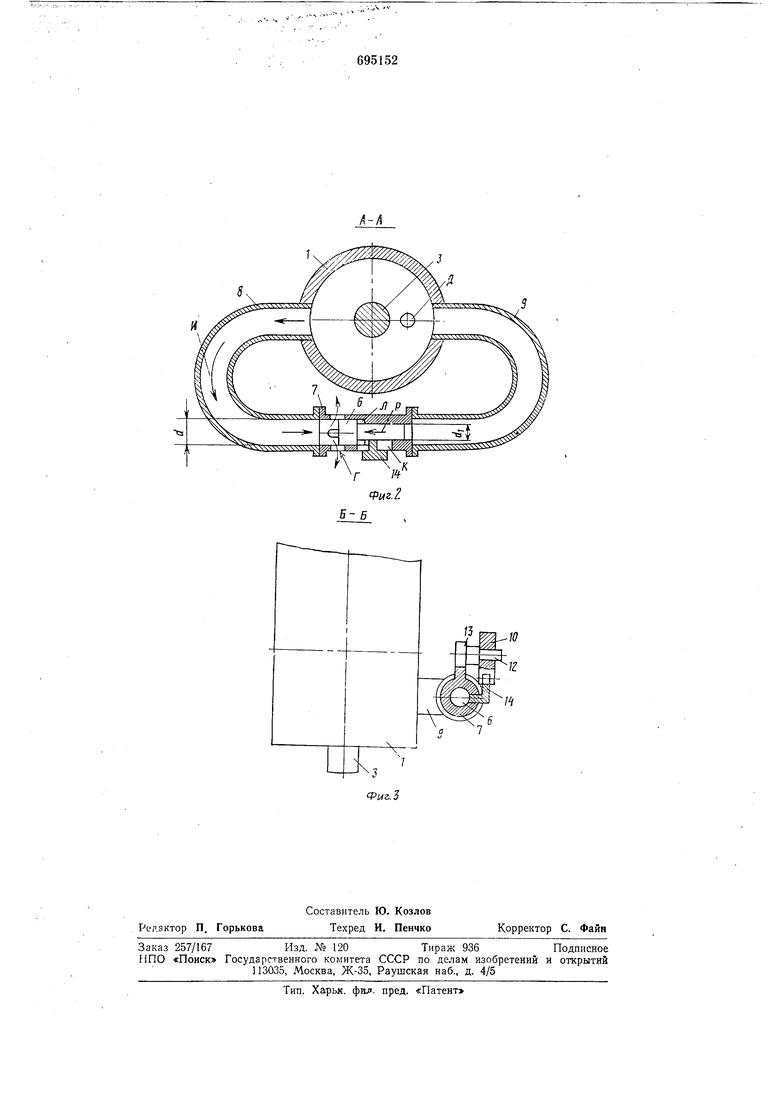
ли 5 для подвода сжатого воздуха в нижнюю полость В цилипдра 1. Кроме того, устройство включает клапан перепуска воздуха из нижней полости В цилиндра в атмосферу. Этот клапан состоит из ступенчатого подвижного вдоль оси поршня 6, размещенного в ступенчатом цилиндре 7. Полости у обеих оснований поршня б соединены каналами 8 и 9 с нижней полостью В рабочего цилиндра 1, причем цилиндр 7 имеет в месте сопряжения с поршнем 6 по большому диаметру d радиальные отверстия Г перепуска, которые перекрываются полностью или частично этой частью поршня. Кроме того, поршень 6 снабжается компенсирующим механизмом, создающим для каждого груза свою постоянную по величине осевую силу Р, направленную в сторону от меньше-. го основания поршня с диаметром di к .большему - с диаметром d. Компенсирующий механизм выполнен в виде поворотного зубчатого сектора 10, снабженного рычагом 11, установленным на оси 12, закрепленного на кронштейне 13 ступенчатого цилиндра 7. Зубчатый сектор 10 находится в зацеплении с рейкой .14, жестко соединенной со ступенчатым поршнем 6. В ступенчатом цилиндре 7 выполнен осевой паз К, в который входит рейка 14. На рычаге 11 установлен с возможностью перемещения вдоль него контргруз 15. Для увеличения интервала грузоподъемности устройства в магистрали 5 имеется отверстие с краном 16. В верхней части гидроцилиндра закреплена косынка с проушиной 17 для навешивания на крюк грузоподъемного механизма. Устройство работает следующим образом. Устройство подвешивается на крюк крана или друго.го грузоподъемного устройства за проушину 17 и перемещается на рабочее место, где оно подсоединяется к воздушной сети гибким шлангом через трубопровод магистрали 5. Кран 16 в это время закрыт. Затем на устройство прикрепляется груз. После этого контргруз 15 перемещается в положение, при котором клапан закрыт даже в том случае, если в полости рабочего цилиндра установилось максимальное давление, равное давлению Б воздушной сети. После этого открывают кран 16 и начинают перемещать контргруз 15 до тех пор, пока не появится возможность П0|дъема и опускания груза от незначительного усилия рабочего. По мере навинчивания контргруза расход воздуха, поступающего по направлению стрелок И к перепускным отверстиям Г будет постепенно увеличиваться, но порщень 6 при этом все время находится в равновесии. так как сила, действующая на него из-за наличия разницы диаметров d и di, компенсируется силой, создаваемой за счет момента от контргруза 15. Подвижность рейки .14 обеспечивается благодаря наличию в ступенчатом цилиндре 7 продольного осевого паза К. Через этот же паз К осуществляется сброс утечек воздуха из промежуточной полости Л из-за неплотностей по сопрягаемым поверхностям d к .di, поршня 6 и ступенчатого цилиндра 7. Перемещение пневматически уравновешенного груза осуществляется благодаря повышению или понижению давления в нижней полости В рабочего цилиндра путем воздействия на груз усилия рабочего. Так, например, для плавного опускания груза, рабочий прилагает усилие вниз, за счет чего давление в полости В увеличивается. Оно передается на поршень 6 и сдвигает его в сторону, противоположную направлению действия силы Р. При этом увеличиваются утечки воздуха через отверстия Г, его давление в полости В снижается и груз легко перемещается. По окончании требуемого перемещения груза поршень 6 под действием силы Р возвращается в исходное положение, восстанавливая прежнее давление в полости В и обеспечивая равновесное пололсение поршня 2, а следовательно, и груза. При настройке устройства, если необходимо перемещать небольшие по весу грузы, кран 6 открывается неполностью. Этим изменяется грузоподъемность устройства. Верхняя полость Н рабочего цилиндра 1 во всех случаях сообщается с атмосферой. Формула изобретения 1. Захватное устройство для плавного вертикального перемещения груза, садержащеё рабочий цилиндр, корпус которого снабжен проушиной для навешивания на kpюк грузоподъемного механизма, установленный в цилиндре порщень со штоком, на конце которого имеется приспособление для крепления груза, и соединенный с цилиндром трубопровод для подвода рабочей среды, снабженный регулируемым дроссельным отверстием, отличающееся тем, что, с целью увеличения диапазона весов перемещаемых грузов и обеспечения их двустороннего перемещения, в нижней части рабочего цилиндра горизонтально закреплен ступенчатый цилиндр, полости которого соединены каналами с подпоршневой полостью рабочего цилиндра, имеющий перепускное отверстие в корпусе для соединения с атмосферой, причем в ступенчатом .цилиндре установлен ступенчатый поршень, снабженный компенсирующим механизмом для создания
постоянного одностороннего усилия на поршень.
2. Устройство по п. 1, отличающееся тем, что компенсирующий механизм содержит жестко связанную со штоком ступенчатого поршня зубчатую рейку и находящийся в зацеплении с ней зубчатый сектор, снабженный рычагом, на KOTOpiOM установлен с возможкостью перемещения вдоль него контргруз.
Источники информации, принятые во внимание при экспертизе:
1.Л. С. Брон, Ж. Э. Тартаковский. Гидравлический привод агрегатных станков И автоматических линий. Мащгиз, 1962, с. 150.
2.Авторское свидетельство СССР № 471:274, кл. В 66 С 1/34, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Траверса | 1979 |
|
SU872433A1 |
| Дверной закрыватель А.З. Султанова | 1990 |
|
SU1805202A1 |
| Пневматический привод стеклоочис-ТиТЕля ТРАНСпОРТНОгО СРЕдСТВА | 1978 |
|
SU796016A1 |
| Грузозахватная траверса | 1980 |
|
SU922039A1 |
| Штыревое строповое устройство | 1982 |
|
SU1025642A2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ПОВОРОТОМ КОЛЕС ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2167786C1 |
| А. Е. РУДНИЦКИЙ | 1968 |
|
SU217623A1 |
| Устройство для погрузки и обработки сыпучих материалов предотвращающей смерзание жидкостью | 1988 |
|
SU1622256A1 |
| Вакуумное захватное устройство | 1977 |
|
SU686967A1 |
| Устройство для транспортировки ферромагнитных изделий | 1982 |
|
SU1098894A1 |
±А
Фиг. / ,
/
