Известны крановые захваты-кантователи, например ковшей со штучным грузом, содержащие траверсу с серьгой для подвески на крюк грузоподъемного механизма, систему гидроуправления, жестко соединенные с концами траверсы две тяги, несуш,ие привод поворота, на осях свободных концов которых установлены механизмы захвата.
Каждый механизм предложенного кранового захвата содержит корпус с двумя торцовыМИ, соосно расположенными направляюш,ими пазами, в которых смонтированы противоположно перемеш,аюш;иеся ведуш;ий и ведомый захваты. Эти захваты снабжены на одних концах гнездами, соответствуюш,ими диаметру захватываемых цапф ковша, а на других - зубчатыми рейками, кинематически связанными шестерней. Шестерня синхронизирует движение захватов, размеш,ена в полости корпуса и свободно СИДИТ на оси. Эта ось проходит через отверстие, выполненное в центре корпуса. Перемеш,ение захватов осуш,ествляется гидродилиндром, шток поршня которого закреплен в проушине, выполненной на ведуш.ем захвате, а ЦИЛИНДР жестко укреплен на корпусе. Описанная конструкция захвата обеспечивает повышение производительности и маневренности при производстве погрузочно-разгрузочных операций в труднодоступных местах.
поворота механизмов этого захвата выполнен в виде двух параллельно действующих секторных гидроцилиндров. Они закреплены на тягах, секторные штоки поршней которых жестко связаны с проушиной, закрепленной на корпусе.
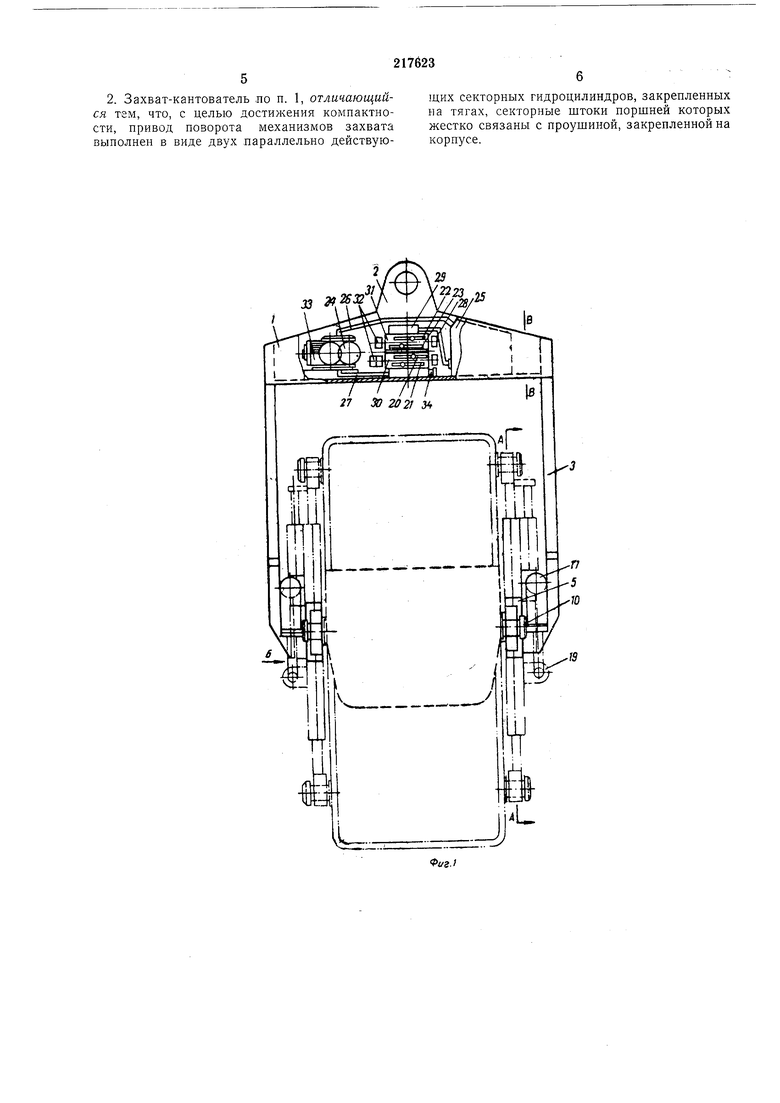
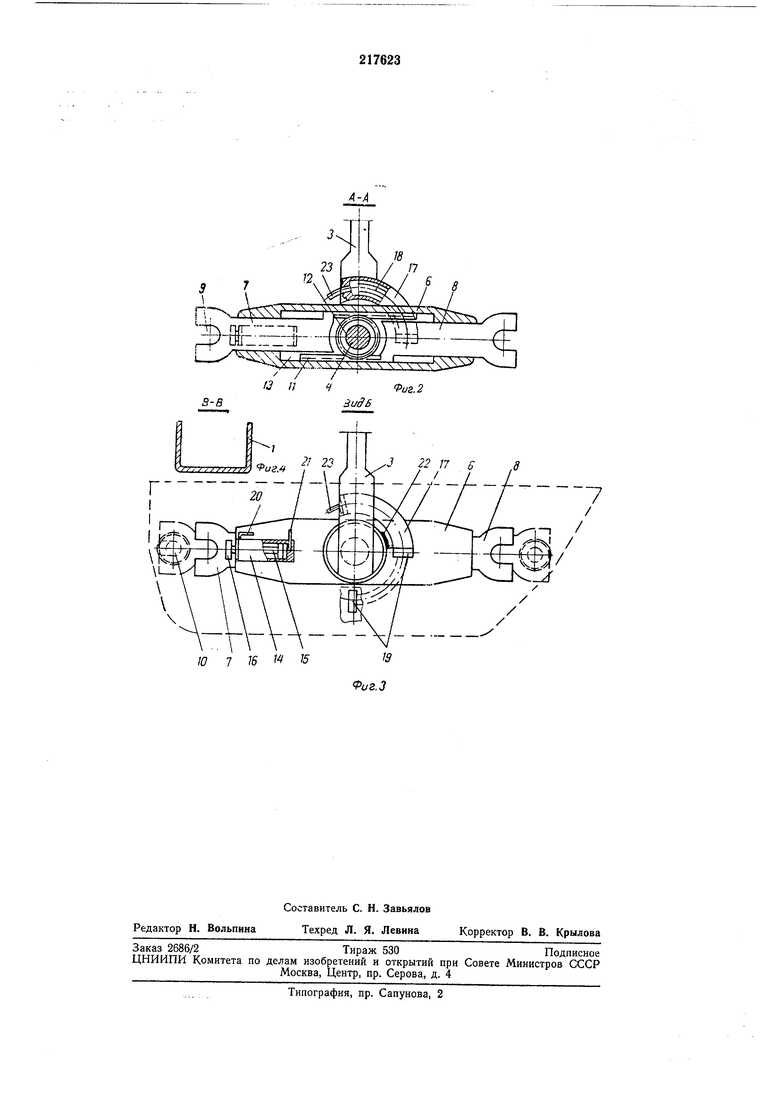
На фиг. 1 изображена схема описываемого устройства, общий вид с ковшом; на фиг. 2 - то же, разрез по Л-А на фиг. 1; на фиг. 3 - то же, ВИД по стрелке Б фиг. 1; на фиг. 4 - разрез по В-В на фиг. 1.
Крановый захват-кантователь содержит траверсу 1 с серьгой 2 для захвата грузоподъемным механизмом и жестко связанные с траверсой ТЯГИ 3, имеющие на свободных концах ОСИ 4. На ЭТИХ осях установлены поворотные механизмы захвата 5, каждый из которых состоит ИЗ полого разъемного корпуса 6 с двумя направляющими пазами. В этих пазах смонтированы противоположно перемещающиеся ведущий 7 И ведомый 8 захваты, снабженные на ОДНИХ концах гнездами 9, соответствующими диаметру захватываемых цапф 10 ковша, а на других зубчатыми рейками 11, которые кинематически связаны между собой шестерней J2. Эта шестерня размещена в полости 13 корпуса 6 И свободно сидит на оси 4, проходящей через отверстие, выполненное в центре корпуса. На корпусе механизма захвзта жестко закреплен гидроцилиндр 14, щ15 которого закреплен в проушине 16 ведущего захвата 7.
На тягах 3 смонтированы секторные гидроцилиндры 17 поворота механизмов захвата 5, штоки 18 которых жестко связаны с проушинами 19 корпуса.
Масло поступает в рабочие полости гидроцилиндров 14 и 17 соответственно по магистралям 20, 21 и 22, 23.
Для координации рабочих движений механизмов захвата 5 на траверсе установлена система гидроуправления, содержащая шестеренчатый насос 24 и масляный бак 25, которые сообщаются между собой магистралью 26 и присоединяются магистралями 27 28 к двухпозиционному распределителю 29 с размещенными в его корпусе двумя золотниками 30 и 31. Золотник 30 имеет положения «захват, «нейтральное и «съем и управляет двумя параллельно работающими гидроцилиндрами 14, для чего подключается к магистралям 20 и 21. Золотник 31, имеющий положения «подъем, «опускание, «нейтральное и «плавающее, управляет двумя также параллельно работающими гидроцилиндрами 17 и подключается к магистралям 22 и 23. Из любого положения золотники под действием пружин возвращаются в положение «нейтральное. Электромагниты 32 управляют золотниками 30 и 31. Электродвигатель 33 вращает насос.
В корпус распределителя 29 вмонтирован предохранительный клапан 34, регулируемый на необходимое давление в гидросистеме.
Работает описываемое устройство следуюЩИ1И. образр.м.
Захват-кантователь здхватывается за серьгу 2 управляемой подвеской мостового крана. При вкл ючении электродвигателя 33 начинает работать насос 24. Масло, поступающее в него из бака 25, нагнетается в распределитель 29, откуда в зависимости от положения золотников поетуцает в цилиндры или возвращается в бак при установке обоих золотников в нейтральное положение. Цри помощи электромагнитов, 32 золотник 30 устанавливается на «съем, а золот:ник 31 - на «подъем, штоковые полости гидроцилиндров М и 17 соответственно по магистралям 21 и 23 заполняют маслом. В результате захваты 7 и S смещаются к оси 4 и занимают горизонтальное положение. При отключении тока золотники под действием пружин станут в нейтральное положение. Захват-кантователь готов к работе.
Мостовой кран транспортирует этот захват к 1совшу с грузЬм и, опуская его вниз, помещает-механизмы захвата между выступающими цапфами ковша.
Вшбуждением соответствующего электромагнита золотник 30 переключают на «захват, и масло под давлением по магистралям 20 поступает в поршневые полости гидроцилиндров 14, захвата, приводя в движение их штоки /5. В результат:е ведущий 7 и кинематически связанный с ним ведомый 8 захваты раздвигаются и гнездами 9 захватывают цапфы 10. При этом масло из штоковых полостей гидроцилиндров 14 по магистралям 21 через золотник 30 и по магистрали 28 свободно сливается в бак. Ковш вместе с описываемым устройством транспортируется краном к месту разгрузки, где золотник 31 соответствующим электромагнитом переключают на «опускание. В этом случае масло по магистралям 22 под давлением поступает в поршневые полости гидроцилиндров 17 поворота и выдвигает штоки 18„ которые одновременно и плавно поворачивают захваты 5 на 90°, выгружая ковш. Масло, вытесняемое из штоковых полостей гидроцилиндров 17 по магистралям 23, через золотник 31 и по магистрали 28 сливается в бак. После разгрузки ковша очередным переключением золотника 31 на «подъем масло подается в штоковые полости цилиндров 17, и их штоки
18 возвращают захваты 5 с ковшом в исходное положение. Масло из поршневых полостей вытесняется по магистралям 22 через золотник 31 на слив. Мостовой кран транспортирует захват-накопитель с ковшом в нужный участок цеха, где очередным переключением золотника 30 на «съем масло подается в штоковые полости гидроцилиндров захвата 14. Штоки 15 сдвигают захваты 7 и 5 к оси 4, и гнезда 9 освобождают цапфы 10 ковша. Масло, вытесняемое из поршневых полостей гидроцилиндров 14 захвата по магистралям 21 через золотник 30 и магистраль 28, свободно сливается в бак 25.
Предмет изобретения
1. Крановый захват-кантователь, например ковшей со штучным грузом, содержащий траверсу с серьгой для подвески на крюк грузоподъемного механизма, систему гидроуправления, жестко соединенные с концами траверсы две тяги, несущие привод поворота, на осях свободных концов которых установлены механизмы захвата, отличающийся тем, что, с целью повышения производительности и маневренности при производстве погрузо-разгрузочных работ в труднодоступных местах, каждый механизм захвата содержит корпус с двумя
торцовыми соосно расположенными направляюшими пазами, в которых смонтированы противоположно-перемещающиеся ведущий и ведомый захваты, снабженные на одних концах гнездами, соответствующими диаметру захватываемых цапф ковша, а на других - зубчатыми рейками, кинематически связанными между собой шестерней, синхронизирующей движения захватов, размещенной в полости корпуса и свободно сидящей на оси, проходящей через отверстие, выполненное в центре корпуса, причем перемещение захватов осуществляется гидроцилиндром, шток поршня которого закреплен в проушине, выполненной на ведущем захвате, а сам цилиндр жестко за2. Захват-кантователь ло п. 1, отличающийся тем, что, с целью достижения компактности, привод поворота механизмов захвата выполнен в виде двух параллельно действующих секторных гидроцилиндров, закрепленных на тягах, секторные штоки поршней которых жестко связаны с проушиной, закрепленной на корпусе.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНОВЫЙ ЗАХВАТ-КАНТОВАТЕЛЬ | 1969 |
|
SU254059A1 |
| СТЕНД ДЛЯ СБОРКИ И ДВУСТОРОННЕЙ СВАРКН ЛИСТОВОГО МАТЕРИАЛА В ПОЛОТНИЩА | 1973 |
|
SU366951A1 |
| Крановый захват-кантователь | 1986 |
|
SU1386536A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Система поворота шарнирно сочлененной гусеничной машины | 1988 |
|
SU1530520A2 |
| Привод захвата-кантователя | 1981 |
|
SU1030297A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2012 |
|
RU2501930C2 |
| Погрузочно-транспортная машина | 1990 |
|
SU1767197A1 |
| Гидравлический привод погрузочно-транспортной машины | 1979 |
|
SU896268A1 |
1-V1.
Л: шг;- 1 -п1-, Шd
Ю 7 5 W /5
