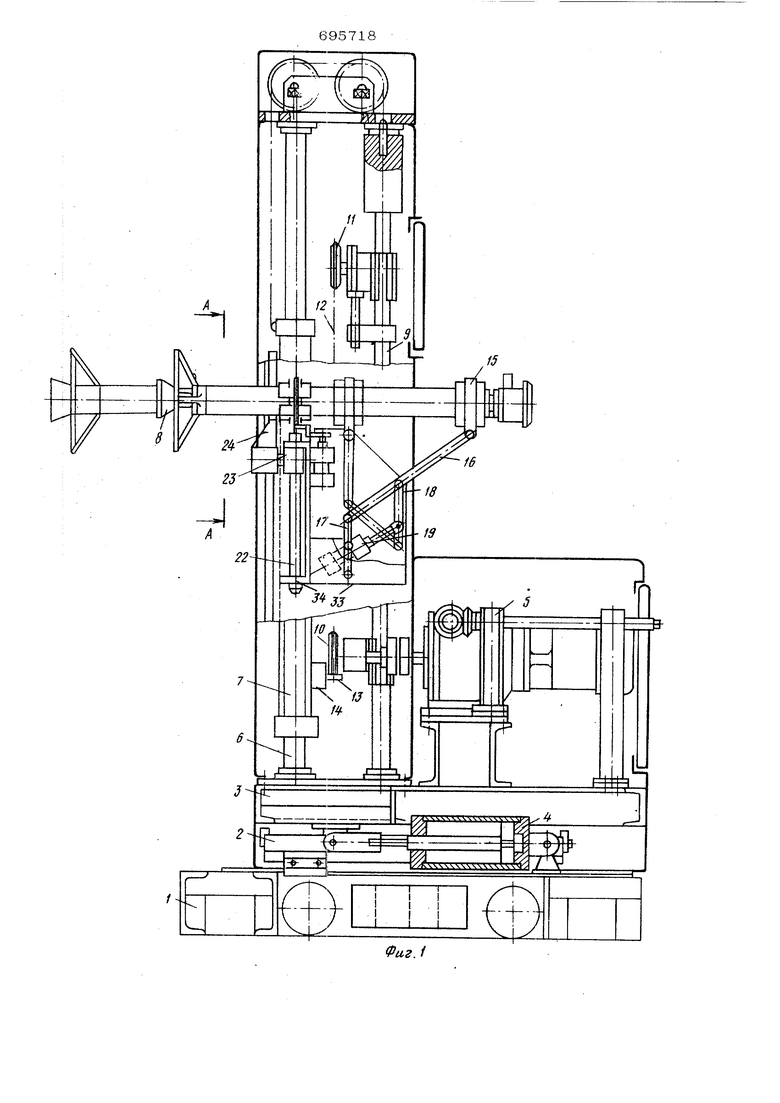
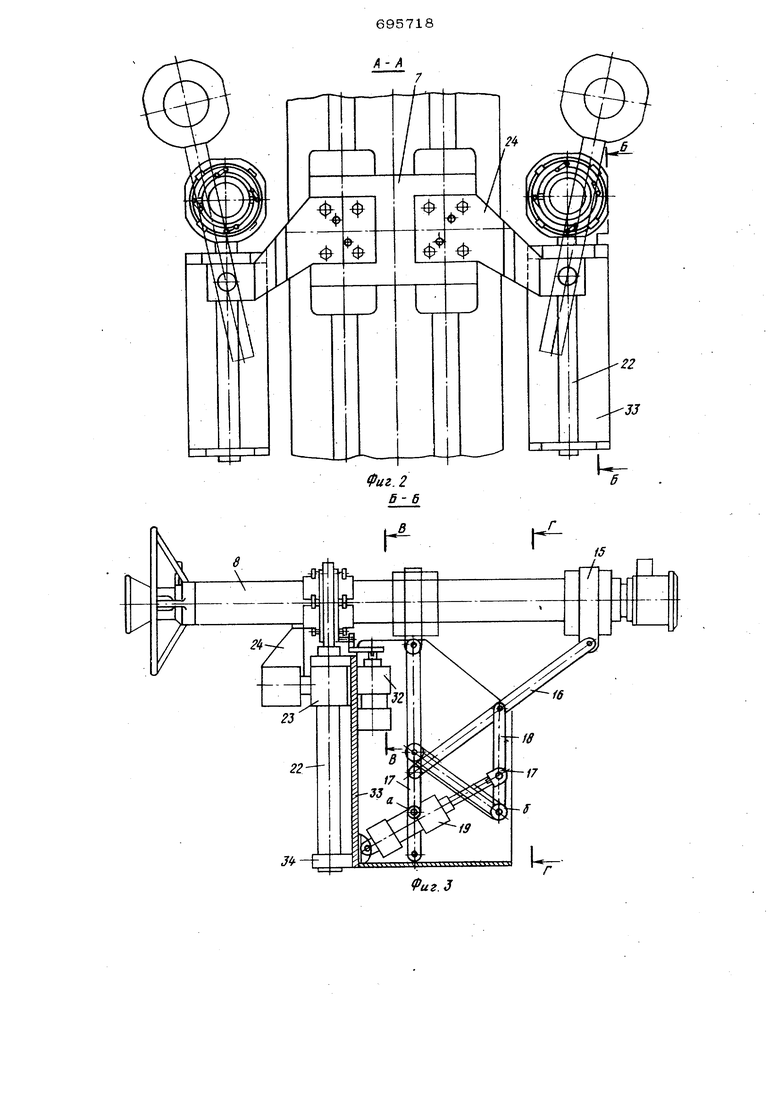
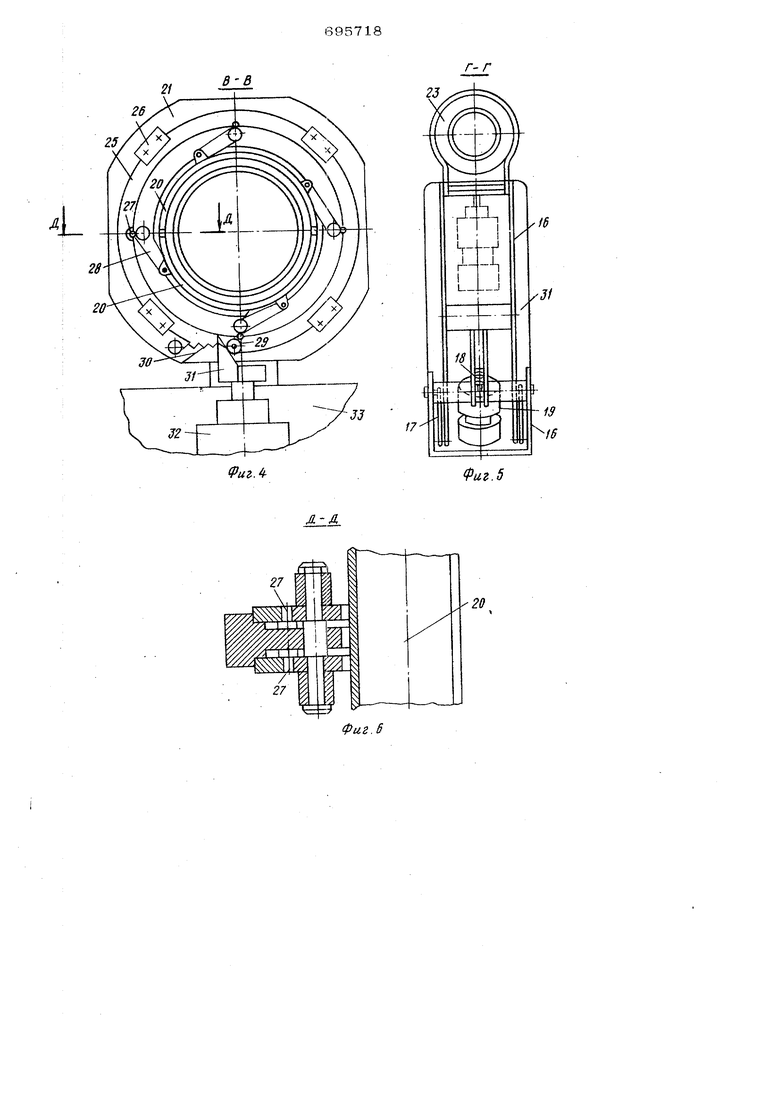
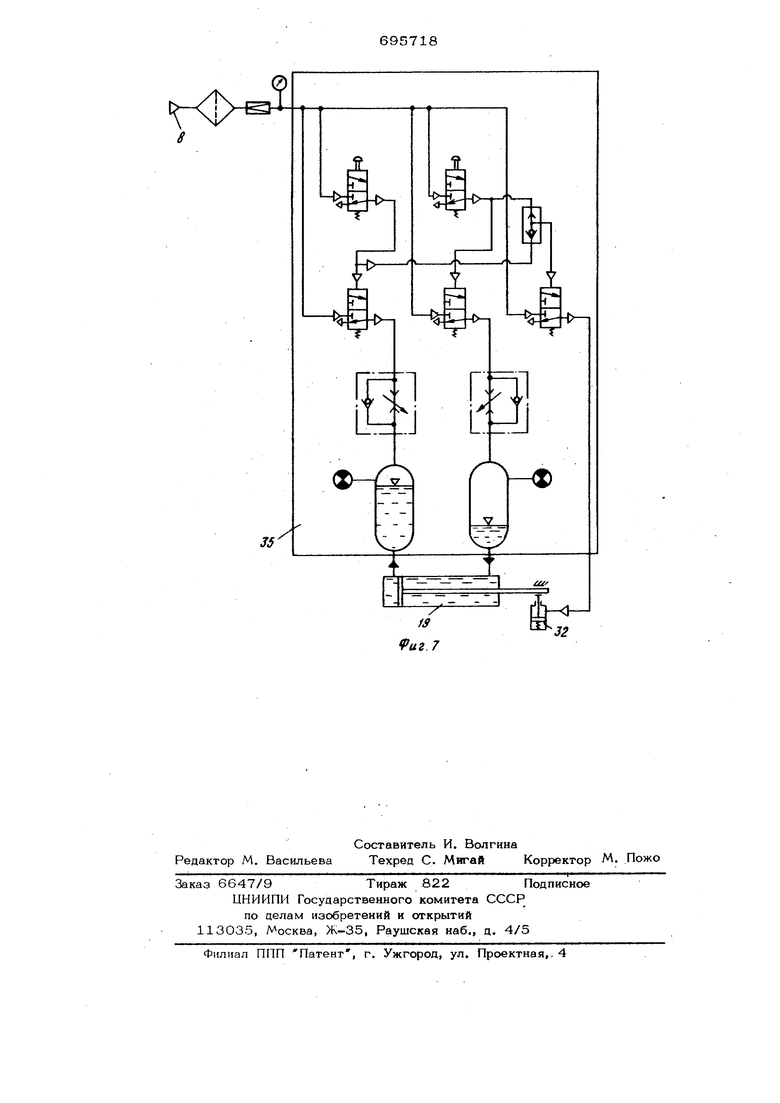
Изобретение относится к автоматическому нанесению лакокрасочного покрытия и может быть использовано в окрасочных установках при нанесении покрытий мето- , дами пневматического, пневмоэлектростатического и электростатического распыления. Известно устройство, содержащее распылитель, закрепленный на телескопической штанге, управление которой осуществляется автоматически i. Недостатком эТого устройства является сложность системы управления и ограниченность веса распылителя. Известно также устройство для нанесения покрытия, содержащее подвижный стол, на котором установлена с возможностью возвратно-поступательного перемещения по направляющей каретка с распылителем, связанным пантографной системой рычагов со lUTOKOM силового цилинд ра позиционирования, и систему управления перемещением распылителя 2. Это устройство является наиболее близким к описываемому изобретению. Недостатками этого устройства являются ограниченность хода распылителя и его веса, недостаточная точность позиционирования к сложность системы управления перемещением распылителя из-оа инерционности пневматических устройств управления. Цель изобретения - повышение точности позиционирования распылителя и надежности его работы, а также увеличение его хода. Для достижения этой цели устройство снабжено разъемной опорой распылителя и механизмом ее разъема, связанным с системой управления перемещением распылителя. Опора выполнена в виде разрезной втулки, а механизм разъема опоры выполнен в виде закрепленной на каретке неподвижной платы и взаимодействующего с ней своим фиксатором поворотного кольца, связанного через плавающие пальцы и рычаги с частями разрез- ной втулки и снабженного подпружиненны цилиндрическим упором, взаимодействутощйм со штоком пневмоцилиндра меха: ма разъема. На фиг. 1 изображено устройство в разрезе; на фиг. 2 - разрез А-А, фиг. 1; на фиг. 3 - разрез Б-Б, фиг, 2; на фи1 4 - разрез EJ-В, фиг. 3; на фиг. 5 - разрез Г-Г, фиг. 3; на фиг. 6 - сечение , фиг. 4; на фиг. 7 - схема управления перемещением распылителя. Устройство включает станину 1, на направляющих 2 которой установлен подвижный стол 3, для перемещения которого служит гидроцилиндр 4. На подвижном столе 3 установлена с возможностью возвратно-поступательного перемещения от мотора-вариатора 5 по направляющей 6 каретка 7 с распылите- лем 8. Передачу движения от мотора-вариато ра 5 к каретке 7 осуществляют установленные на стойке 9 приводная 1О и обо ротная 11 звездочки с цепью 12, ведущий палец 13 и кулиса 14, закрепленна на каретке 7. - Корпус распылителя 8 связан втулкой 1:5 и пантографной системой рычагов 16 18 со штоком гидроцилиндра. 19 позицконирования. Устройство снабжено разъемной опорой распылителя, выполненной в виде раз резной втулки 20, и механизмом разъема опоры, который содержит неподвижную плату 21, закрепленную на каретке 7 с помощью штока 22, размещенного в отверстии держателя 23, установленного на кронш тейне 24, закрепленном на каретке 7. Кроме того, механизм разъема опоры содержит поворотное кольцо 25, взаимодействующее своим фиксатором 26 с заточкой неподвижной платы 21, связанно г через плавающие пальцы 27 и рымги 28 с частями разрезной втулки 20 и снабженное цилиндрическим упором 29, зак- решленным через пружину ЗО на неподвижной плате 21. Цилиндрический упор 29 взаимодействует с коническим упором 31 подпружиненного щтока пневмоцилиндра 3.2 механизма разъема, закрепленного на кронщ- теине 33, смонтированном с помощью проушин 34 на штоке 22. Рычаги 17 и 18-в точках а и & шарнирно закреплены на кронштейне 33. Держатель 23, втулка 15.и проушина 31, снабжены стопорными винтами (на чертежах не показаны). Устройство снабжено системой 35 управления перемещением распылителя, связанной с гидроцилиндром 19 позиционирования и пневмоцилиндром 32 механизма разъема. Устройство для нанесения покрытия работает следующим образом. Перед началом работы производится регулировка механизма позиционирования распылителей стопорными винтами держателя 23, стопорными винтами втулки 15 и стопорными винтами проушин 31 кронштейна 34. При включении привода 5, звездочка 10 вертикально-замкнутого цепного конвейера 12 получает непрерывное вращательное движение, трансформируемое в возвратно-поступательное движение каретки 7 с корпусом распылителя 8 и с механизмом его позиционирования. При поступлении сигнала от датчика, контролирующего расстояние от головки распылителя до окрашиваемой поверхности, в беси токовую полость пневмоци- линдра 32 с подпружиненным штоком поступает рабочая жидкость из блока подачи. При этом шток пневмоцилинцра 32 своим коническим упором 31 нажимает на цилиндрический упор 29, поворачивая при этом кольцо 25, которое через плавающие пальцы 27 и рычаги 28 раздвигает половинки разрезной втулки 20. При ЭТОМмежду корпусом распылителя 8 и разрезной втулкой 20 образуется зазор, позволяющий свободно перемещаться корпусу распылителя 8. Одновременно рабочая жидкость поступает в штоковую или бесштоковую (в зависимости от сигнала) полость гидроцилиндра 19, при этом перемещение штока передается через пантографную систему рычагов 16-18 подвижной втулке 15, а с ней корпусу распылителя 8. Корпус распылителя получает прямолинейное горизонтальное перемещение и нужную сторону. При прекращении Сигнала прекращается поступление сжатоГо воздуха в пнев- моцилиндр 32, и его щток под действием пружины опускается, конический упор 31 отхоцит от цилиндрического упора 29, а поворотное кольцо 25 под действием пружин ЗО поворачивается в обратную сторону, тем самым сжимая раз)езную втулку 2О, которая охватывает корпус распы лителя 8. Таким образом, разрезная втулка закрепляет корпус распылителя 8 на ааданлом расстоянии от окрашиваемой поверхности. В этом положении производится окраска изделий. При нехватке хода корпуса распылите ля включается механизм позиционирования окрасочного устройства относительно станины 1, который перемещает подвижный стол 3 при помощи гидроцилиндр 4. Использование предложенного устройства с механизмом позиционирования рас пылителя позволяет увеличить ход корпуса распылителя, а нагрузки, статические и динамические, распределить на две точ ки опоры, связанные с жесткой системой конструкции каретки. Формула изобретения 1. Устройство для нанесения покрытия, содержащее подвижный стол, на котором установлена с возможностью воз- вратно-поступательного перемещения по направляющей каретка с распылителем, связанным пантографной системой рычагов со щтоком силового цилиндра позиционирования, и систему управления перемещением распылителя, отличающееся тем, что, с целью повыше- ния точности позиционирования распылителя и надежности его работы, а также увеличения его хода, устройство снабжено разъемной опорой распылителя и механизмом ее разъема, связанным с системой управления перемещением распылителя. 2. Устройство по п. 1, отличающееся тем, что, опора выполнена в виде разрезной втулки, а механизм разъема опоры выполнен в виде закрепленной на каретке неподвижной платы и взаимодействующего с ней своим фиксатором поворотного кольца, связанного через плавающие пальцы и рычаги с частями разрезной втулки и снабженного подпружиненным цилиндрическим упором, взаимодействующим со штоком пневмоцилиндра механизма разъема. Источники информации, принятые во внимание при экспертизе 1.Патент Франции № 2232924, кл. В 05 В 13/04, опублик. 1975. 2.Патент Англии № 965753, кл. В 2 В, опублик. 1964 (прототип).
ВВ
26
25
ФигЛ
Г- Г
23
1ё
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нанесения покрытий | 1980 |
|
SU902848A1 |
| Управляющее устройство | 1980 |
|
SU959039A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Устройство для нанесения покрытия | 1977 |
|
SU654303A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ ВЫПРЕССОВКИ ИЛИ ЗАПРЕССОВКИ ВТУЛОК | 2020 |
|
RU2738714C1 |
| Устройство для нанесения покрытия | 1977 |
|
SU728932A1 |
| Сверлильный станок | 1982 |
|
SU1047610A2 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| ПРЕСС ГИДРАВЛИЧЕСКИЙ ДЛЯ ВЫПРЕССОВКИ ИЛИ ЗАПРЕССОВКИ ВТУЛОК | 2020 |
|
RU2735405C1 |
20
32
fuz.7
