Изобретение относится к транспортному машиностроению и может быть использовано для механизации погрузо но-разгрузочных операций при внутрицеховой транспортировке изделий. Известно устройство для передачи штучных грузов, содержащее подающий рольганг, приемный рольганг и перегр зочный механизм С13.. Недостатком данного устройства яв ляется то, что оно не может обеспечить перегрузку штучных грузов с напольной транспортной тележки, трасса которой пересекает трассу рольгангов Наиболее близким по технической сущности и достигаег-юму результату к предлагаемому является устройство для передачи штучных грузов, включаю щее основание, подающий рольганг в виде установленньлх на стойках двух рядов приводных роликов, транспортную тележку, механизм съема грузов с транспортной тележки и механизм перегрузки, расположенный над подающим рольгангом 2, Данному устройству присуща недостаточная производительность, за счет расположения механизмов . съема грузо с транспортной тележки сбоку от падающего рольганга выполнения меХанизма съема грузов в виде полочного разгрузчика, выполнение механизма перегрузки в виде цепного транспортера. Такое выполнение и расположение механизмов увеличивает время перегрузочных операций. Цель изобретения - повышение производительности устройства. Указанная цель достигается тем, что механизм съема грузов с транспортной тележки выполнен в виде подъем кого стола и расположен между рядами приводных роликов подающего рольганга, а стойки приводных роликов подаиощего рольганга установлены на основании с возможностью поворота в направлении перемещения транспортной тележки, трасса которой пересекает трассу подающего рольганга, а механизм перегрузки выполнен в виде подвесного манипулятора. Причем стойки приводных роликов подающего рольганга установлены на основании посредством осей и имеют связанные с осями приводы поворота, при этом стойки приводных роликов подакицего рольганга имеют кронштейны, на которых установлены приводы роликов. Кроью того, подъемный стол
выполнен в виде горизонтальных балок связанных с ними вертикальных винтовгаек с ограничителями и конической приводной передачи.
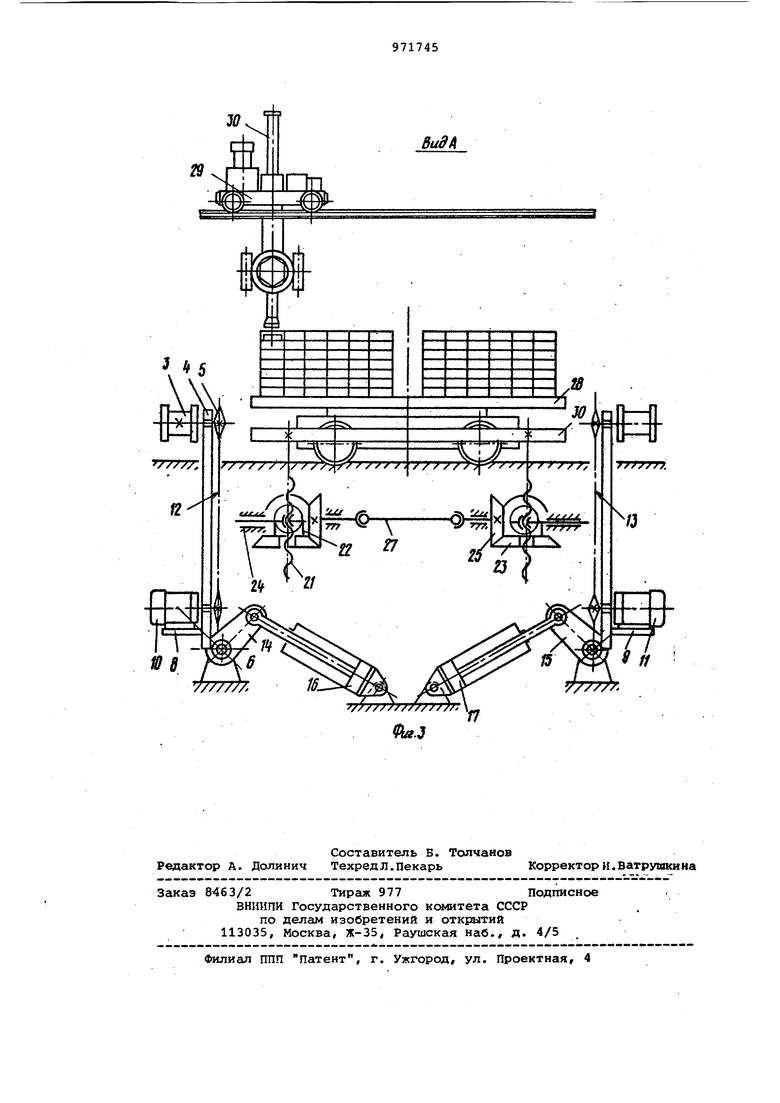
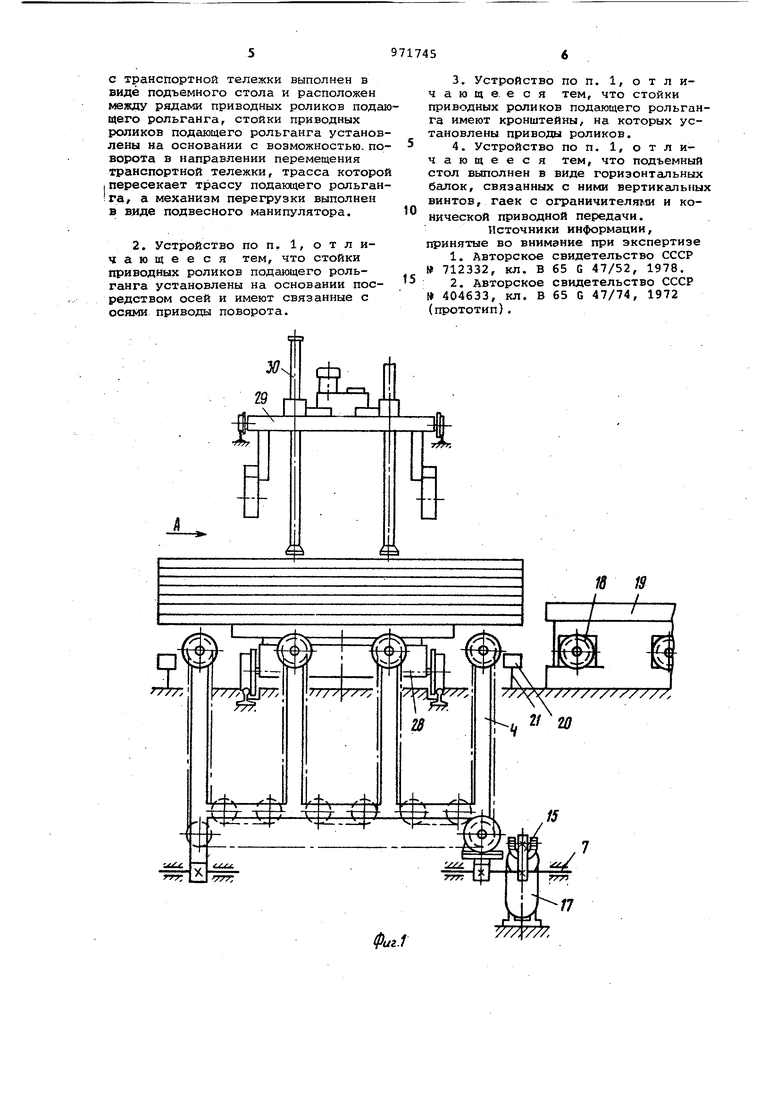
На фиг, 1 изображены поданнций, приемный рольганги и перегрузочный механизм, вид сбоку; на фиг, 2 - то же, вид сверху) на ф.иг, 3 - вид А tja фиг. 1.
Устройство для перемещения штуч гых грузов содержит подающий рольган состоящий из двух рядов 1 и 2 приводHiac. роликов 3, установленных на основании на стойках 4 вместе с соосными звездочками 5, Стойки 4 рядов 1 и 2 зафиксированы соответственно на осях б и 7, На которых жестко закреплены кронштейны 8 и 9 с приводами 10 и 11, соединенные со звездочками 5 цепями 12 и 13, а также одноплечие рычаги 14 и 15, соединенные соответственно со штоками силовых цилиндров 16 и 17 . Оси б и 7 со всегда закрепленными на них механизмами установлены в приямках, из которых над полом выступают верхние части стоек 4, находящихся в вертикальном положении. При этом приводные ролики 3 расположены на одной продольной оси с роликами 18 приемного рольганга, расположенного на кронштейнах горизонтально-замкнутого сборочного конвейера 19, предназначенного для сборки, например, лонжеронов автомобильных рам. Между рядами 1 и 2 приводных роликов расположен механизм съема грузов в виде подъемного стола, балки 20 которого закреплены на вер- тикальных винтах 21, гайки 22 которых жестко скреплены с коническими шестернями 23, расположенньши между ограничителями 24 и находящимися в зацеплении с коническими шестернями 25, соединенными между собой и с приводом 26 шарнирными валами 27. При этом конические передачи и привод находятся в приямке,
Трасса подающего рольганга пересекает трассу напольной транспортной тележки 28, несущей два пакета заготовок лонжеронов, правых и левых.
Над подающим рольгангом расположен механизм перегрузки р виде подвесного манипулятора 29, подъемноспускные штанги 30 которого с захватами установлены на приводной тележке. л направляющие теЛежки расположены перпендикулярно трассе подающего рольганга.
Устройство работает следующим образом.
Транспортная тележка 28с пакетаМИзаготовок, наезжая на датчик (не показан), подает команду на включение привода 26 и силовых цилиндров 16 и 17. Привод- 26 через шарнирные валы 27 и шестерни 25 и 23 вращает гайки 22. При этом винты 21 опукают балки 20. Силовые цилиндры 16 и 17 рычагами 15 и 14 поворачивают оси б и 7 на 90°, отчего стойки 4, опускаясь в приямок, устанавливаются горизонтально. Путь для транспортной тележки 28 освобождается и она, пройдя до середины расстояния рядами приводных роликов 1 и 2, останавливается. Стол тележки 28 поворачивает пакеты заготовок в горизонтальной плоскости на 90 , устанавливая пакеты продольной осью параллельно оси подающего рольганга. После этого включается привод 26 в направлении вращения, противоположном прежнему. Вращением гаек 22 выдвигаются винты 21, поднимая балкш ш 20 пакеты заготовок над столом тележки 28. Освобождаясь от груза, тележка 28 уходит обратно под загрузку. После ухода тележки 28 из зоны приямков включаются силовые ц-илиндры 16 и 17 и возвращают стойки 4 в исходное вертикальное положение. Манипулятор 29 зависает над нapyжны краем одного из пакетов заготовок, штанги 30, захватив одну заготовку, поднимают ее. Мадипулятор 29 передвигается к ближнему ряду приводных роликов 3 и опускает на них заготовку. Потом манипулятор 29, подняв штанги 30, перемещается к другому пакету заготовок, а по команде сборника вклчается привод роликов 3, или привод 11, и цепью 13 через звездочки 5 вращает ролики 3, которые перемещают заготовку на ролики 18 приемного рольганга сборочного конвейера 19. После использования обоих пакетов с подходом тележки 28 цикл повторяется Последовательность движний механизмов осуществляется от датчиков (не показаны).
Предлагаемая конструкция позволяет механизировать и автоматизировать перегрузку штучных грузов с напольной транспортной тележки, трасса которой пересекает трассу рольгангов. При этом повышается безопасность и культура производства при ускорении разгрузки и экономии производственной ПЛОЩс1ДИ.
Формула изобретения
1. Устройство для передачи штучных грузов, включающее основание, подающий рольганг в виде установленных на стойках двух рядов приводных роликов, транспортную тележку, механизм съема грузов с транспортной тележки и механизм перегрузки, расположенный над подающим рольгангом, отличающееся тем, что, с целью повышения производительности устройства, механизм съема грузов
С транспортной тележки выполнен в виде подъемного стола и расположен между рядами приводных роликов подающего рольганга, стойки приводных роликов подающего рольганга установлены на основании с возможностью- поворота в направлении перемещения транспортной тележки, трасса которой I пересекает трассу подакхцего рольган га, а механизм перегрузки выполнен в виде подвесного манипулятора.
2. Устройство по п. 1, отличающееся тем, что стойки приводных роликов подающего рольганга установлены на основании посредством осей и имеют связанные с осями приводы поворота.
3.Устройство по п. 1, о т л ичающе. еся тем, что стойки приводных роликов подающего рольганга имеют кронштейны, на которых установлены приводы роликов.
4.Устройство по п. 1, отличающееся тем, что подъемный стол выполнен в виде горизонтальных балок, связанных с ними вертикальных винтов, гаек с ограничителяг.ш и коoнической приводной передачи.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 712332, кл. В 65 G 47/52, 1978.
5
2,Авторское свидетельство СССР 404633, кп. В 65 G 47/74, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемно-передаточное устройство для линии металлообработки | 1984 |
|
SU1192946A1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Обмоточное устройство для скрепления грузов полимерной пленкой | 1990 |
|
SU1761602A1 |
| АВТОМАТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1992 |
|
RU2045384C1 |
| Линия для изготовления стекол "триплекс | 1979 |
|
SU975601A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| Гибкий автоматизированный участок | 1990 |
|
SU1812063A1 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
| Устройство для пакетирования штучныхгРузОВ | 1978 |
|
SU819014A1 |