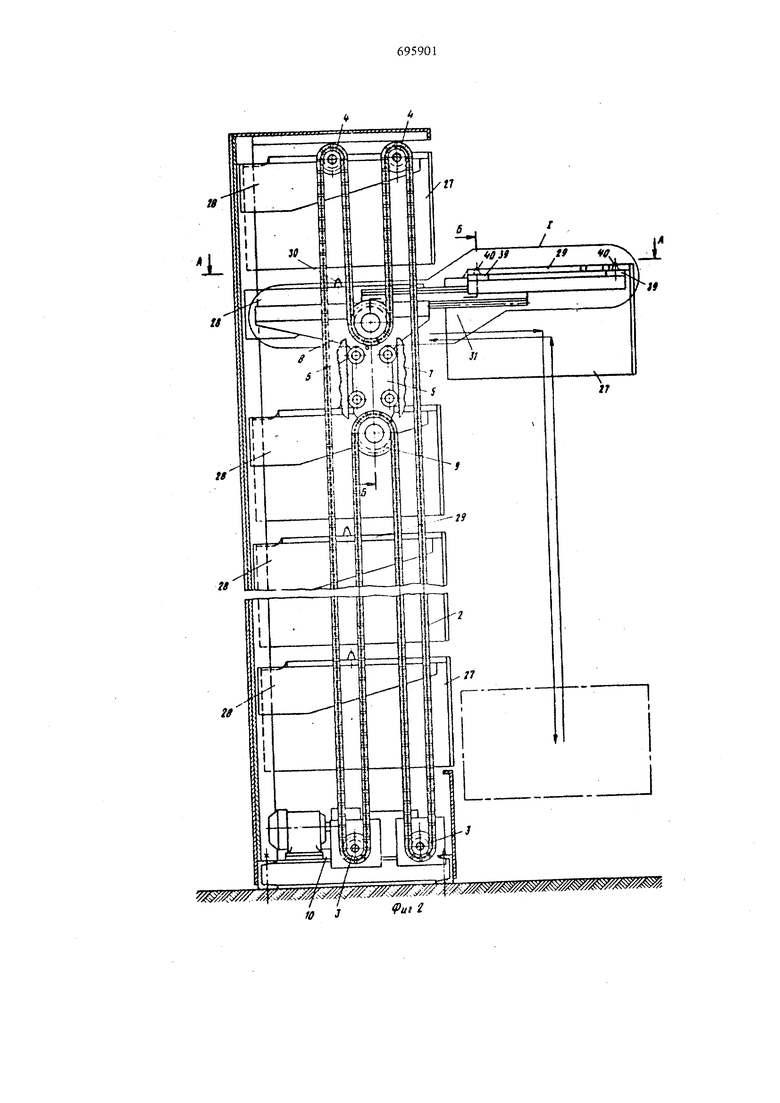
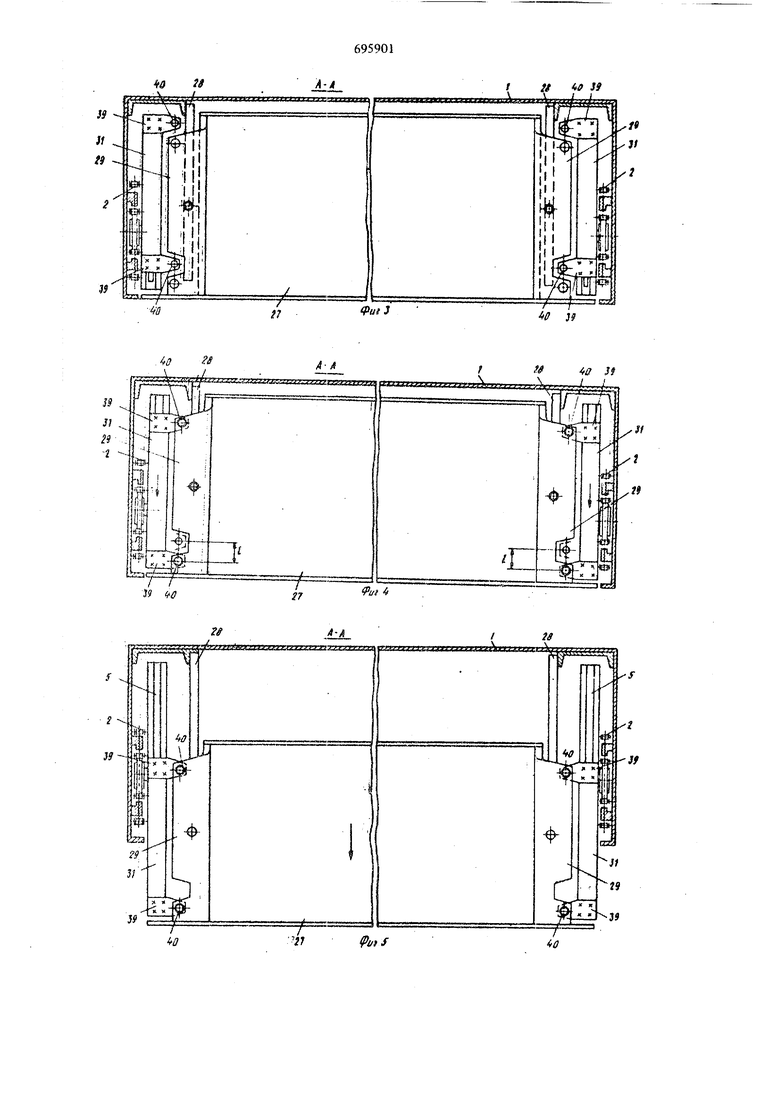
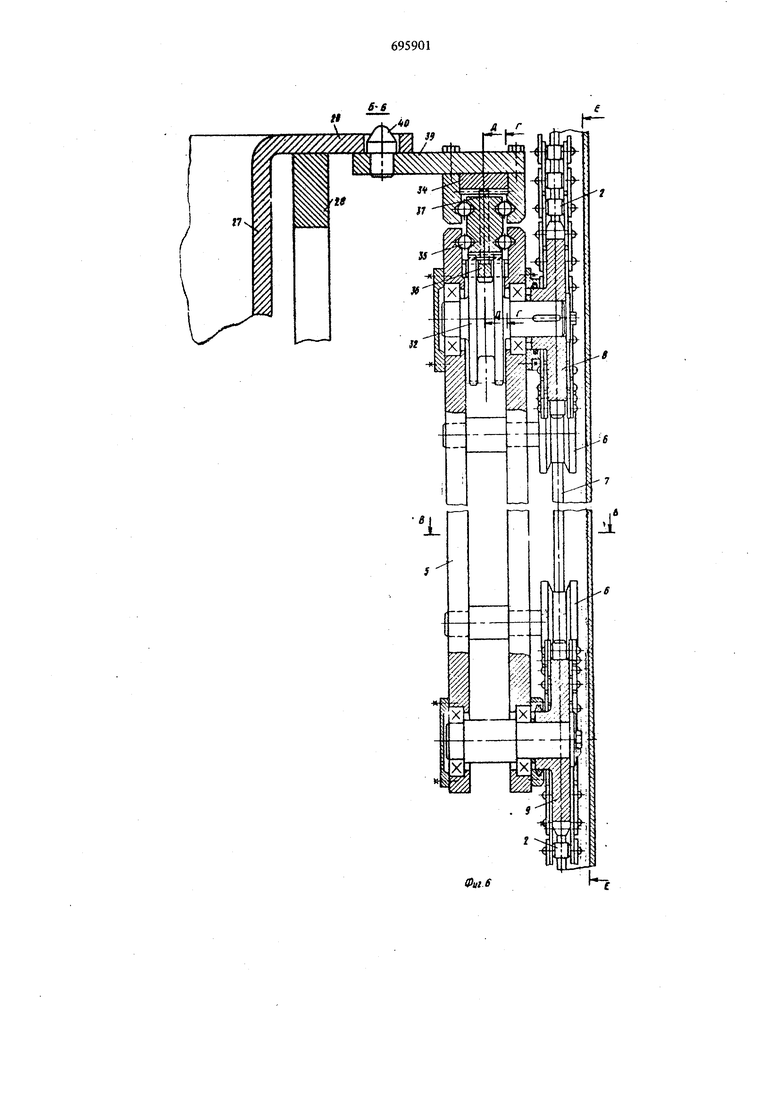
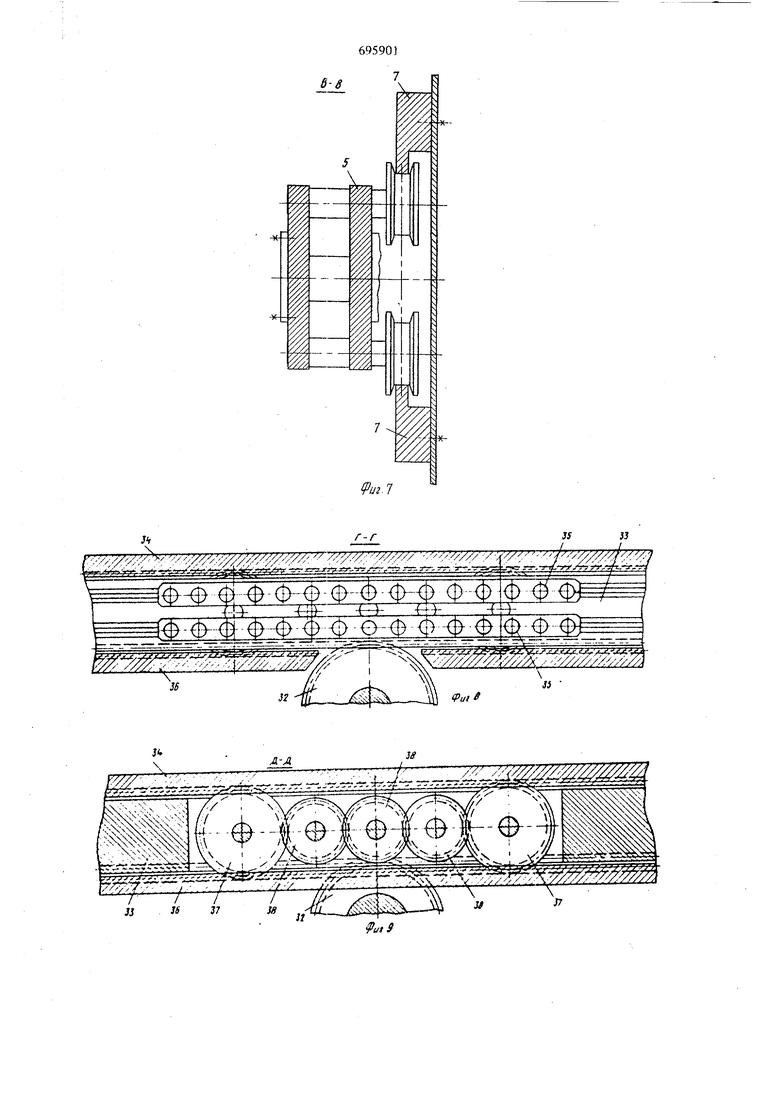
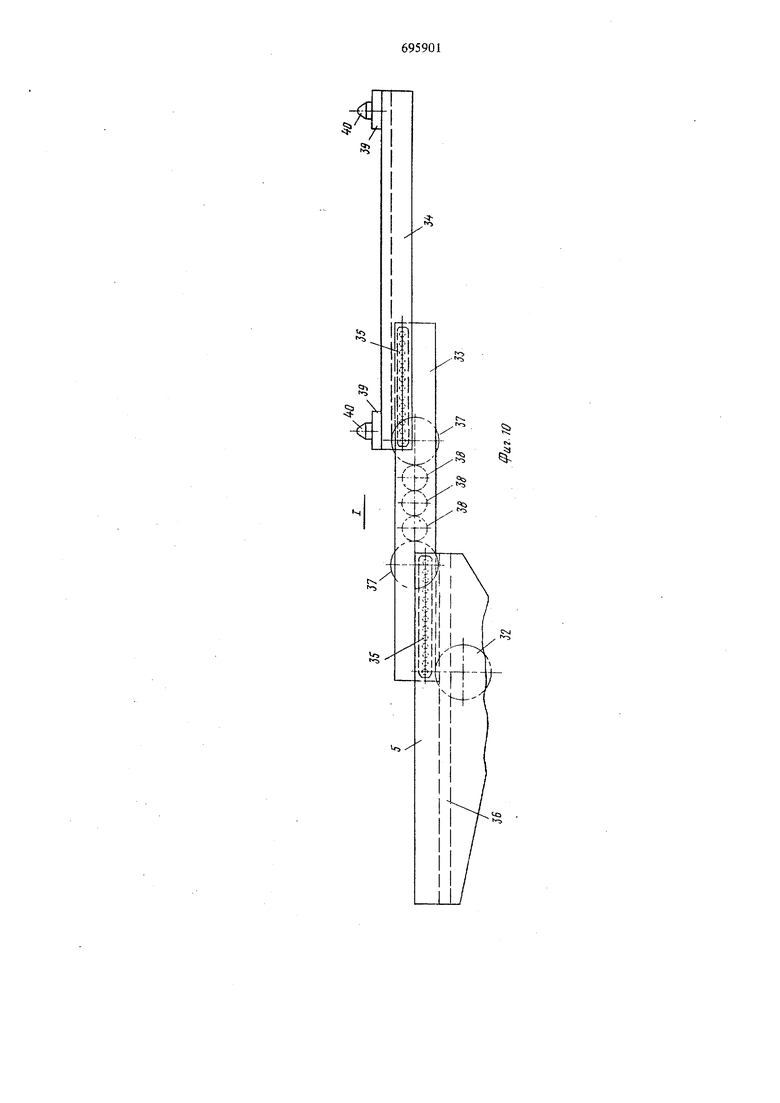
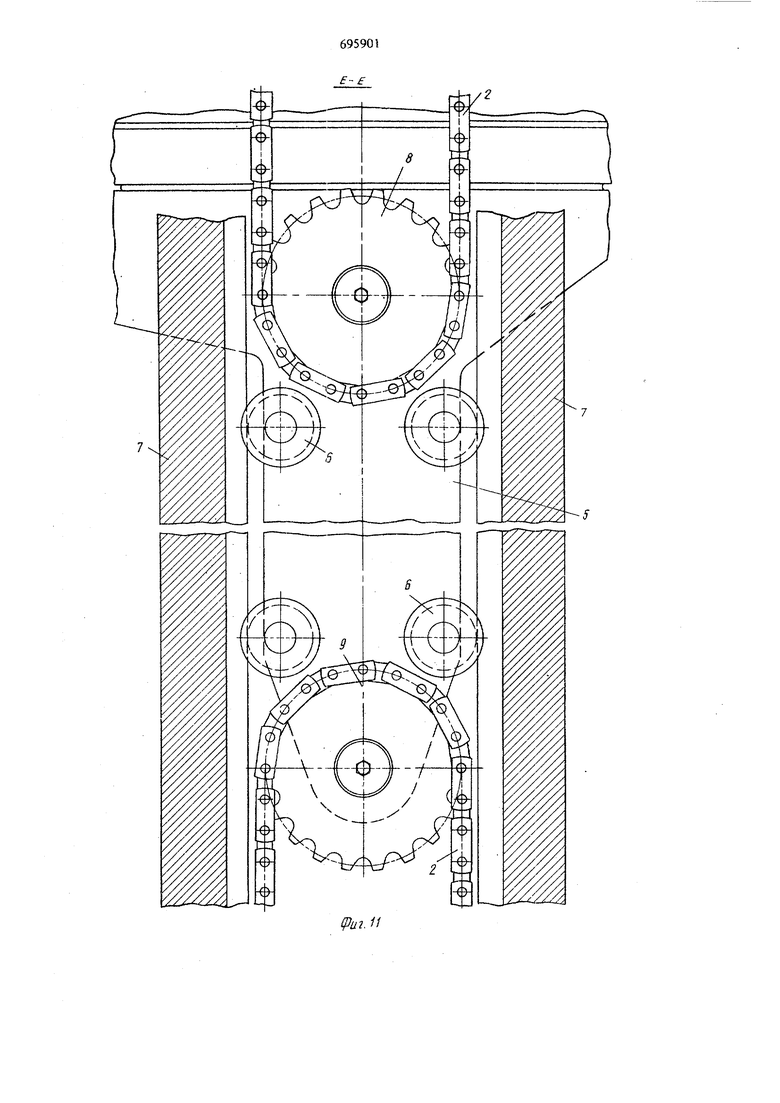
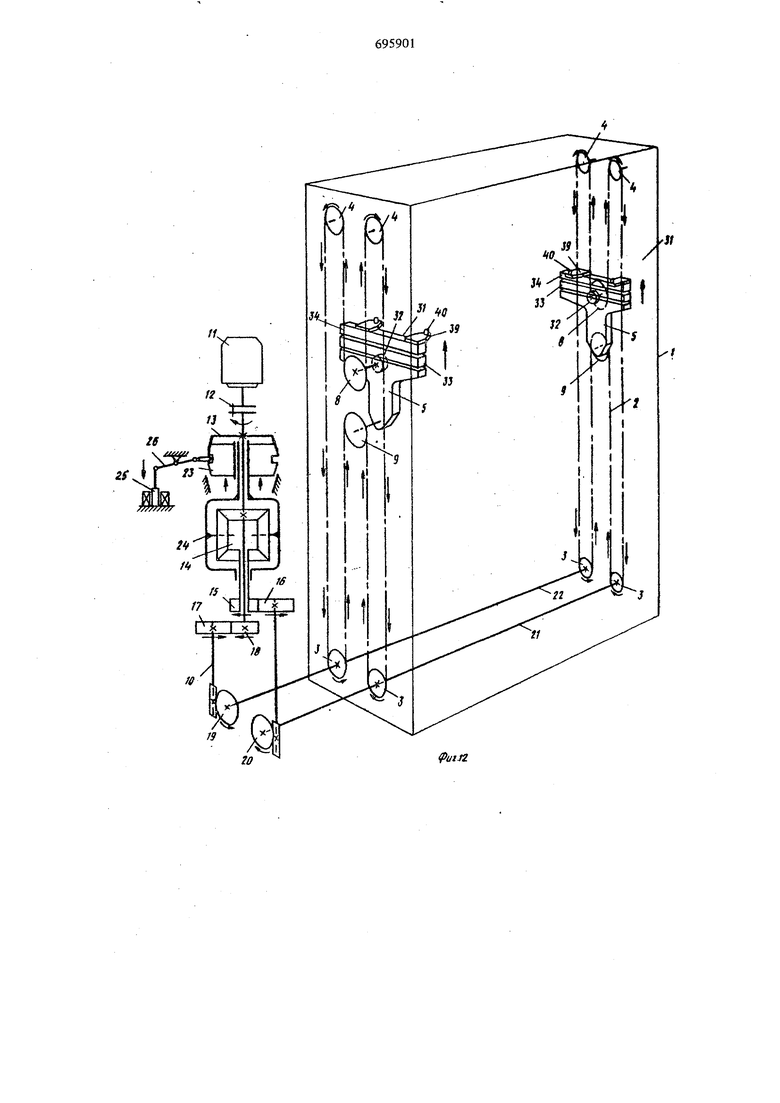
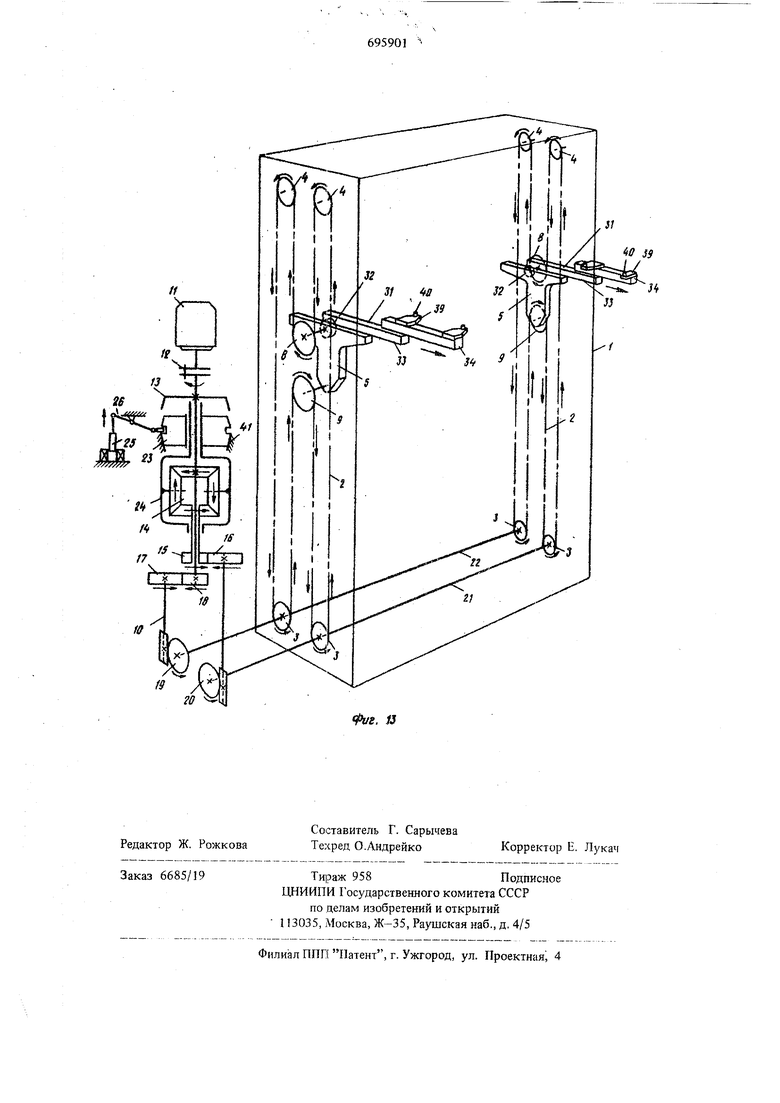
Изобретение относится к складскому хозяйству. Известен механизированный многоярусный стеллаж, содержащий корпус с несущнми кронштейнами, на которых установлены съемные грузонесущие полки, и нодъемио-оплскные каретки 1... Известен также механизированный многоярусный стеллаж, содержащий корпус с несущими кронштейнами, на которых установлены съемные грузонесущие полки, и подъемноопускные каретки, связанные с цепным приводом и снабженные захватами, взаимодействующими с полками 3. Однако эти стеллажи громоздкие и занимают большую площадь. Целью изобретения является уменьшение площади, занимаемой стеллажом. Это достигается тем, что подъемно-опускны каретки с захватами расположены на боковых сторонах полок по их щирине, а захваты снаб жены механизмом их выдвижения, причем контактирующие с полками элементы захватов имеют фиксаторы, взаимодействующие с боковыми CTOpofiarvHi нолок, а механизм выдвижения каждого захвата связан с приводом подъемно-опускных кареток. Иа фиг. 1 показан стеллаж, общий вид; на фун 2 -- то же вид с торца со снятой торцовой ст-енкой; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - то же, в момент перемеики1 я захватов на величушу ; на фиг. 5 то же, в момент выдвих ения грузонесущей полки из корпуса; на фиг. 6 - разрез Б-Б . 2; на фиг. 7 - разрез В-В фиг. в; на фиг. 8 - разрез Т-Т фиг. 6; на фиг. 9 разрез фиг. 6; на фиг. 10 - узел I фиг. 2, захват в вьщвинутом положении; на фиг, И - разрез Е-Е фиг.. 6; на фиг. 12 кинематическая схема стеллажа в момент подъема кареток; на фиг. 13 - кинематическая схема сте.тшажа в момент вьщвижения захвата. В корпусе 1 стеллажа размещены вертикальные цепи 2, огибающие приводные 3 и холостые 4 звездочки. С цепными передачами связаны подъемные каретки 5, которые снабжены роликами 6, взаимодейств а)1дими с нп |равляющими 7, жестко закрепленными на корпусе 1, ч дополнительными звездочками 8 и 9, огибая которые, вертикальные цепи 2 образуют петлевые подвески.
Для перемещения подъемньк кареток 5 стелЛаж снабжен приводом 10, содержащим электродвигатель 11, муфту 12, фрикционную муфту 13 (фиг. 12, 13) дифференциальный механи м 14, связанный с двумя парами цилии)дричёских зубчатых колес 15, 16 и 17, 18. червячными передачами 19 и 20 и валами 21 И 22, на которых жестко закреплены приводные звездочки 8.
Фрикционная муфта 13 имеет среднюю подвижную часть 23, связанную с корпусом 24 дифференциального механизма 14 шлицевым соединением и с электромагнитом 25 - рычагом 26.
Механизированный стеллаж имеет съемные грузонесущие полки 27, установленные на кро гнтейнах 28 с помощью заплечиков 29 (фи1.2) Кронштейны 28 жестко закреплепы на корпусе 1 и имеют фиксаторы 30, входящие в отверстия в заплечиках 29. Этим достигается фиксация грузонесущях полок 27 от самопроизвольного смещения.
Механизировалный стеллаж снабжен размеицснными внутри корпуса 1 и смонтированными на подъемных каретках 5 захватами 31 для выборочного съема и перемещения грузонесущих полок в зону их загрузки и разгрузки. Захвать 31 связаны с приводящими их в действие вертикальными цепями 2 через дополнительные звездочки 8 и вал-пгестерню 32. Каждый захват 31 (фиг. 8, 9 и 10) состоит из среднего реечного звена 33 и грузонесущего реечного звена 34, подвижно соединенньк между собой и относительно подъемной каретки 5 с помощью шариковых опорных элементов 35.
Подвижные звенья 33 и 34 связаны с неподвижной рейкой 36, механизмом выдвижения, содержащим зубчатые колеса 37, закрепленные на среднем реечном звене 33. Зубчатые колеса 37 сблокированы между собой паразитными колесами 38, также закрепленными на среднем реечном звене 33. Среднее реечное звено 33 входит в зацепление с валомшестерней 32.
Грузонесущее реечное звено 34 снабжено захватными элементами 39 с фиксаторами 40.
Управление механизированным стеллажом производится автоматически с помощью электросхемы и концевых выключателей (на чертежах не показаны).
Механизированный стеллаж действует след)юдлим образом.
За исходное состояние принимаем положение подъемных кареток 5 в крайней нижней точке.
Включается электродви -атель 11, и вращение передается через муфту 12 на фрикционную муфту 13 (фиг. 12) с помощью электромагнита 25 и рычага 26. Средняя подвижная часть
23фрикционной муфты 13 перемещается в положение, при котором она соединяет корпус
24дифференциального механизма 14 с валом Ьлектродвигателя 11. В этом положении дифференциальный механизм 14 не участвует в работе, и зубчатые колеса 15 и 18 вращаются
в одном направлении. Далее через зубчатые колеса 17 и 16, червячные передачи 19 и 20, валы 21 и 22 вращение передается на приводные звездочки 3, которые при этом вращаются в разном направлении. В результате этого ветви вертикальных цепных передач 2 двигаются в одном направлении, и подъемные каретки 5 перемещаются по вертикали вверх. Совместно с подъемными каретками по вертикали перемещаются, не вращаясь, дополнительные звездочки 8 и 9.
При достижении заданной высоты в районе грузонесущей полки, требующей разгрузки, срабатывает электромагнит 25 (фиг. 13), который с помощью рычага 26 переводит среднюю подвижную часть 23 фриквдонной муфты 13 в положение тормоза, при котором она прижата к неподвижному корпусному элементу. При этом корпус 24 дифференциального механизма 14 заторможен, зубчатые колеса 15 и 18 вращаются в разные стороны за счет действия дифференциального механизма, приводные звездочки 3 вращаются в одном направлении, а ветви вертикальных цепных передач 2 перемещаются в разные стороны. В результате этого движение кареток 5 по вертикали прекращается, а дополнительные звездочки 8 и 9 начинают вращаться. Звездочки 8, вращаясь, передают крутящий момент на валщестерню 32, которая двигает средние реечные звенья 33, вызывающие, в свою очередь, движение грузонесущих реечных звеньев 34 через зубчатые колеса 37. При смеидении захватнь х элементов 39 на величину . , когда фиксаторы 40 совпадают с отверстиями на заплечиках 29 грузонесущей полки 27 (фиг. 4), срабатывает электромагнит 27, который через рычаг 26 переключает фрикционную муфту 13 на подъем кареток 5, как описано выше.
При соприкосновении захватов 39 с заплечиками 29 грузонесущей полки 27 происходит съем грузонесушей полки с кронштейнов 28 и выход фиксаторов 30 из отверстий в заплечиках 29.
После этого электромагнит 25 снова переключается, и движение -подъемных кареток по вертикали сменяется движением звеньев грузозахватных механизмов по, горизонтали. При максимальном выдвижении грузозахватных механизмов и размещении грузонесущей полки 27 за пределами корпуса 1 снова переключается электромагнит. 25. и вновь происходит смена движения с горизонтального на вер тикальное. Однако в зтом случае в результате переключения электродвигателя 11 на реверс происходит перемещение подъемных кареток с полкой вниз. Когда полка достигнет зоны загрузки и ра грузки, электродвигатель останавливается. Установка грузонесущей полки 27 на прежнее место производится в обратном порядке. Формула изобретения 1. Механизированный многоярусный стеллаж, содержащий корпус с несущими кронщтейнами, на которых установлены съемные грузонесущие полки, и подъемно-опускные ка ретки, связанные с депным приводом и снабженные захватами, взаимодействующими с полками, отличающийся тем, что, с целью уменьщения занимаемой им площади, подъемно-опускные каретки с захватами расположены на боковых сторонах полок по их щирине, а захваты снабжены механизмом их выдвижения, причем контактирующие с полками злементы захватов имеют фиксаторы, взаимодействующие с боковыми сторонами полок. 2. Стеллаж по п. 1, отличающийс я тем, что механизм вьщвижения каждого захвата связан с приводом подъемно-опускных кареток; Источники информации, принятые во внимание при экспертизе 1.Патент-США № 2333097, кл. 214-16.4, 1943. 2.Патент Англии № 996294, кл. А 4 В, 1965. 3.Патент США № 3063769. кп. 312-223, 1962 (прототип).
.т.
10 3
9ui г
-г
17
fpui 3
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный многоярусный стеллаж | 1977 |
|
SU701872A1 |
| Механизированный многоярусный стеллаж | 1982 |
|
SU1024392A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Механизированный стеллаж | 1982 |
|
SU1031852A1 |
| МЕХАНИЗИРОВАННЫЙ МНОГОЯРУСНЫЙ НАКОПИТЕЛЬ | 1990 |
|
RU2029710C1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |
| Механизированный стеллаж | 1986 |
|
SU1382766A1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ, МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА С ХРАНЕНИЕМ АВТОМОБИЛЕЙ НА ПОДДОНАХ, ПРИЁМНО-ПОВОРОТНЫЙ МЕХАНИЗМ ДЛЯ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ С ПОДЪЁМНОЙ КЛЕТЬЮ, КЛЕТЬ ДЛЯ ТРАНСПОРТИРОВКИ ПОДДОНА ВНУТРИ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ, МЕХАНИЗМ СИНХРОННОГО ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩИХ КАРЕТОК КЛЕТИ, АВТОМОБИЛЬНЫЙ ПОДДОН | 2002 |
|
RU2208113C1 |
| ТОРГОВЫЙ АВТОМАТ И УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ТОВАРОВ ДЛЯ ИСПОЛЬЗОВАНИЯ В НЕМ | 2015 |
|
RU2583773C1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |

А-Л
/ /
T 19 (fO гг
/-/«
i™
i -- C -v H4jf f«irT
l
ш
1
)t
0 U
Я.
в
Ф
Й2Э
: J/
J#
/
«
/(С
« J
хЛ
-г ,
с
il
Ш
нэ зес)
4
18
Ecczas
fr l-fv llirittf
/
4i -j/
«
OZi
J/
-Z9
R -JJ
/
W/ -«
Фиг 6
Л Ч
///,- ////.-////У / У ./- У/////
ff f -3S V fSKfi.-ylf/yy 4f Kf grsJr -ia -yr, г.уг-, :m -Ф - Ф-.-Ш- - ф-ф - о --ф - о- ф фх :хдтВуД7 /f/:jejjL /..f.fi.t.f ij-j:.ejffyi Vf.f,f .f / 1 /ЖУхХ: хУ-. .
3f
}3
ТТ/У/, гУ-г Чг-- -/ Цф Ф-о ф
li
it
//
Фиг, 13
