(Л
со
00
to
о
О)
Изобретение относится к складскому оборудованию, в частности к устройствам для складирования и накопления различного рода грузов на машиностроительных предприятиях.
Цель изобретения - повышение производительности.
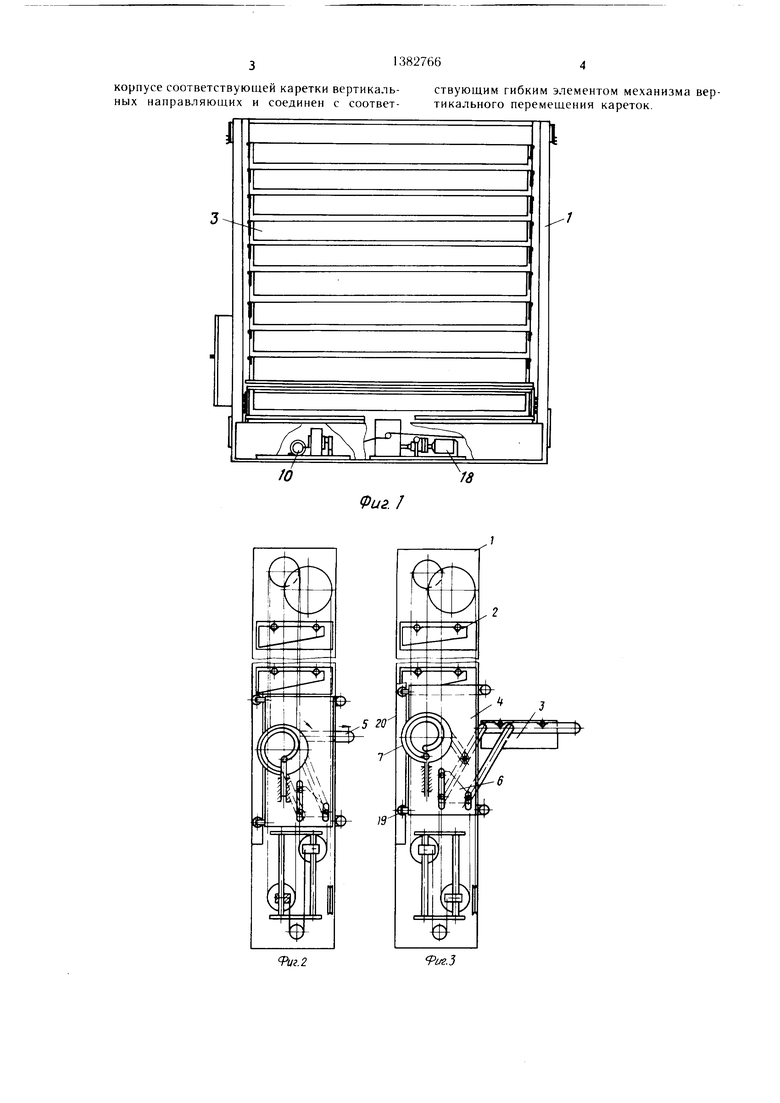
На фиг. 1 показан ме.ханизированный стеллаж, общий вид; на фиг. 2 - то же, вид сбоку в момент съема одной из полок и выдвижения ее за пределы стеллажа; на фиг. 3 - то же, с выдвинутыми полка.ми; на фиг. 4 - кинематическая схема выдвижения захвата; на фиг. 5 вид А на фиг. 4; на фиг. 6 -- график изменения радиусов пазов в зави- симости от угла поворота; на фиг. 7 - циклы передвижения захвата из различного исходного положения.
Механизированный стеллаж содержит корпус 1 с опорными кронп1тейнами 2, съемные полки 3, установленные на кронштей- нах 2, подъемно-опускные каретки 4 с захватами 5 для ЮЛОК, механизмы 6 выдвижения захватов и барабаны 7 со специальными винтовыми пазами 8 и 9 (фиг. 3 и 4) на торцовых поверхностях, связанными с механизмами 6 выдвижения и приводом 10 горизонтального перемеш,ения.
Механизм 6 выдвижения захвата образован двумя параллельными штангами 11 и 12, одни концы которых шарнирно соединены с захватом 5, а другие подвижно раз.мешены в вертикальных прорезях 13 каретки 4.
Штанга 11 связана с соответствующим барабаном 7 поворотным рычагом 14, один конец которого шарнирно соединен с одной из параллельных II, а другой шарнирно закреплен на каретке 4. Кро.ме этого, поворот)1ый рычаг 14 имеет палец 15, который находится в 1азу 8 барабана 7.
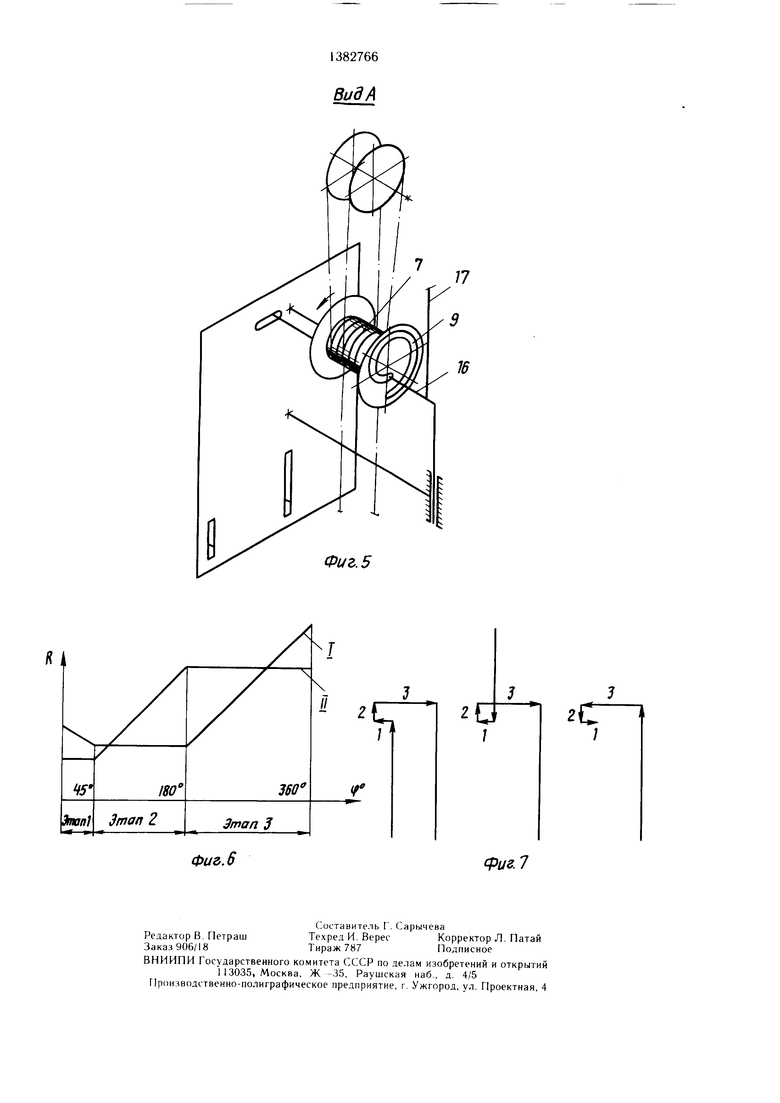
Механизм вертикального перемещения захвата (фиг. 4) содержит палец 16, который подвешен J с помощью троса 17 привода 18 вертикального перемещения и име- ет возможность ограниченного относительно каретки вертикального перемещения, которое задается пазом 9.
Подъемно-опускные каретки 4 имеют катки 19, расположенные в вертикальных на- правляюших 20. Палец 16 установлен с возможностью перемещения в вертикальной направляющей.
Управление стеллажом производи1ся с помощью электросхемы.
Механизированный стеллаж работает следующим образом.
Исходным положением может являться любое положение кареток 4. После нажатия соответствующей кнопки на пульте управления электрошкафа включается привод 18 вертикального перемещения кареток, в результате чего происходит перемещение кареток в направлении выбранной полки, дойдя до которой каретка останавливается.
причем гнезда захвата располагаются несколько ниже цапф полки 3. Привод вертикального перемещения отключается и включается привод 10 горизонтального перемещения захватов, вращение от которого передается барабану 7 с пазами 8 и 9 и происходит вывод полки за пределы стеллажа При этом сложное движение захвата 5 можно разбивать на три простых, по этапам.
Этап 1. Радиус паза 8 уменьшается, действуя на палец 15, механизм захвата перемещается внутрь стеллажа, подводя гнезда под цапфы полки 3. При этом радиус паза 9 остается неизменным и вертикального перемещения кареток не происходит.
Этап 2. Радиус паза 8 не изменяется, а радиус паза 9 увеличивается, в результате чего происходит подъем каретки на определенную величину и захват полок за цапфы.
Этап 3. При неизменном радиусе 9 радиус 8 увеличивается и происходит выдвижение полки за пределы стеллажа.
Зависимость изменения радиусов пазов 8 и 9 от угла юворота барабана 7 показана соответственно кривыми 1 и II (фиг. 5).
По окончании этапа 3 привод 10 гори- зонта.чьного перемещения отключается и включается привод 18 вертикального перемещения, в результате чего каретки 4 с выдвинутой полкой опускаются в нижнее положение, привод 18 вертикального перемещения отключается.
Установка полки 3 на прежнее место в стеллаж производится в обратном порядке.
Формула изобретения
Механизированный стеллаж, содержащий раму, смонтированные на ней опорные кронштейны для съемных полок, установленные в закрепленных на раме вертикальных направляющих каретки с выдвижными захватами для взаимодействия с боковыми частями съемных полок, приводной механизм вертикального перемещения кареток, включающий связанные с последними I ибкие элементы, и приводной механизм выдвижения захватов, включающий рычаги, связанные одними концами с захватами, а другими - с корпусами кареток, отличающийся тем, что, с целью повышения производительности, он снабжен барабанами, каждый из которых связан с соответствующей кареткой посредством пальцев, размещенных в выполненных на его торцах криволинейных пазах, и посредством огибающего его гибкого элемента с приводом механизма выдвижения захватов, при этом первый из пальцев соединен с одним из рычагов упомянутого механизма выдвижения, а второй установлен в закрепленных на
корпусе соответствующей каретки вертикальных направляющих и соединен с соответствующим гибким элементом механизма вертикального перемещения кареток.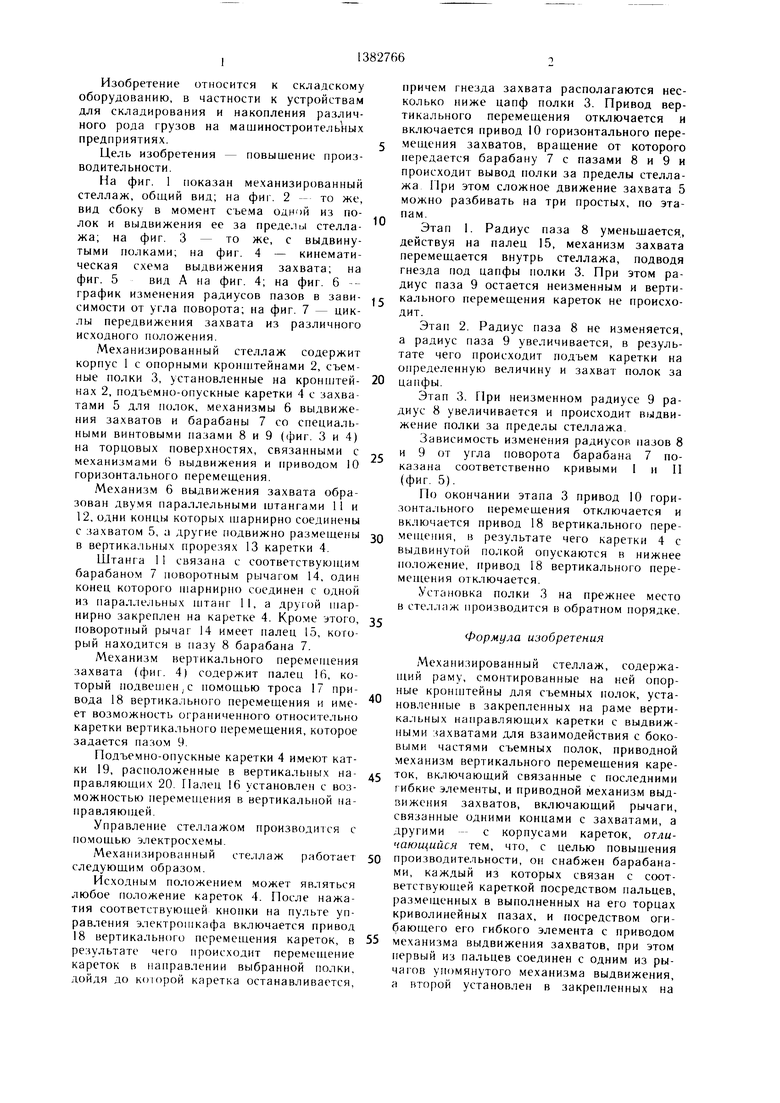
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный многоярусный стеллаж | 1982 |
|
SU1024392A1 |
| Механизированный стеллаж | 1982 |
|
SU1031852A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Механизированный многоярусный стеллаж | 1976 |
|
SU695901A1 |
| Механизированный многоярусный стеллаж | 1977 |
|
SU701872A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| МЕХАНИЗИРОВАННЫЙ МНОГОЯРУСНЫЙ НАКОПИТЕЛЬ | 1990 |
|
RU2029710C1 |
| Многоярусный механизированный стеллаж | 1987 |
|
SU1491769A1 |
| Устройство для шаговой подачи рабочего органа | 1983 |
|
SU1134824A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
Изобретение относится к складскому оборудованию, в частности к устройствам для складирования и накопления различного рода грузов на машиностроительных предприятиях. Цель изобретения - повышение производительности. Механизированный стеллаж содержит раму с опорными кронштейнами для съемных полок и каретки 4 с захватами 5. Механизм вертикального перемещения кареток содержит гибкий элемент, связанный с пальцем 16, размещенным в криволинейном пазу торца барабана 7. Механизм выдвижения захватов 5 включает связанный с одним из рычагов 14 и размещенный в криволинейном пазу на другом торце барабана 7 палец 15. При выдвижении захватов 5 последние при перемещении в пазах барабана 7 пальцев 15 и 16 после подъема и захвата полок выдвигаются за габарит рамы. 7 ил.
.2
Фиг. /
Риг.5
Bi/дА
Фиг. 5
U
/7
5
m
т
Лааа)
Зтап 2
Этап 3
Фи&.б
17
2С
сриг.7
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
