1
Изобретение относится к области вычислительной техники и может быть использованогпри построении цифровых вычислительных машин, а также в качестве самостоятельного устройства, например, при решении задач навигации.
Известное устройство для вычисления трнгонометрическизс функций обладает низкой скоростью вычислений,что делает его неприменимьам при решении навигационных задач в реальном масштабе времени 1.
Наиболее близким по технической сущности к предложенному изобретению является устройство, содержащее два регистра координат, два сдвигателя, блок управления, два сумматора координат и сумматор аргумента, блок памяти, выход которого подключен к первому входу сумматора аргумента, к первым входам сумматоров координат подключены выходы соответствующих регистров координат, ко второму входу первого сумматора координат под ключен выход первого сдвигателя, а ко второглу входу второго сумматора координат подк.гаочен выход второго сдвигателя, выходы первого и второго регистров координат подключены к
первым входам второго и первого сдвигателей,соответственно 2.Это устройство обеспечивает более высокую скорость вычислений, но все же его быстродействие является недостаточным. Во-первых, количество итераций не зависит от величины аргумента.Во многих случаях, в частности, при ма.лых приращениях аргумента не все
0 итерации являются необходимыми. При этсм независимость числа итераций от величины приращения приводит к потере быстродействия. Во-вторых, после выполнения итераций модуль векто5ра увеличится, в результате чего требуется соответствующая коррекция результатов вычислений.
Цель изобретения - повышение быстродействия.
0
Поставленная цель в устройстве достигается тем, что в него введены дешифратор и блок экстраполяции, к первому входу которого подключен лервый выход сумматора аргумента, а ко
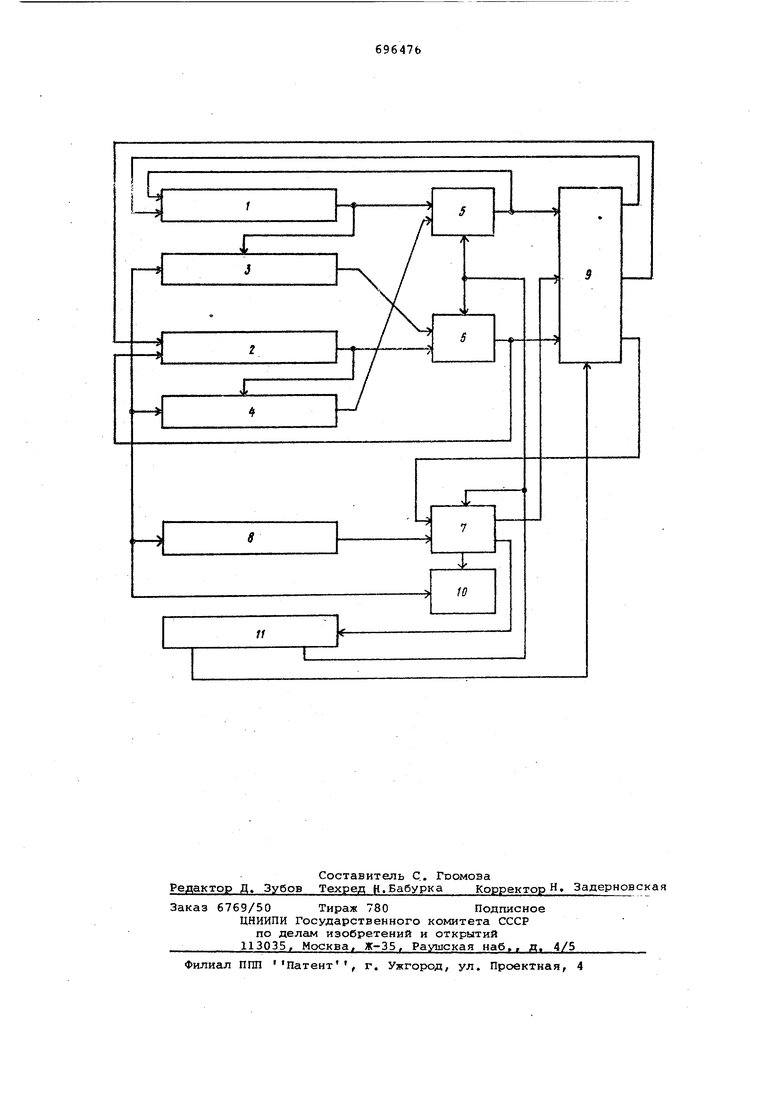
5 второму входу - выход первого сумматора координат и первый вход первого регистра координат, к третьему входу - выход второго сумматора координат и перЕчй вход второго регист0ра координат, к четвертому входу первый выход блока управления, к первому выходу - второй вход первого регистра координат, ко второму выходу - второй вход второго регистра координат, а к третьему выходу вшорой вход сумматора аргумента,третий вход которого соединен со вторым выходом блока управления, и третьими входами сумматоров координат, второй выход - со входом блока управления, а третий выход - со входом дешифратора, выход которого соединен со вхо дом блока памяти и вторыми входами сдвигателей. Йа чертеже представлена блок-схе. ма устройства. Устройство для вычисления тригоно метрических функций содержит регист « координат 1, 2, сдвигатели 3, 4, сумматоры координат 5,6, сумматор 7 аргумента, блок 8 памяти, блок 9 экс траполяции, дешифратор 10, блок 11 управления. Устройство работает следующим образом. в блоке экстраполяции 9 хранятся значения координат и угла, соответст вующие Некоторому количеству предшес вующих положений вектора.В блоке про изводится вычисление экстраполирован ных значений коордийат и угла вектор которые заносятся в регистры 1,2 и сумматор 7, причем в сумматор запись происходит с инверсией знака. Далее на вход сумматора 7 поступает код нового значения аргумента, и в сумматоре образуется разность действительного и экстраполированного значе ний аргумента. Дешифратор 10 определяет номер наибольшей угловой-константы в этой разности и выдает соответствующий сигнал на сдвигатели 3 и 4 и в блок 8 памяти. По сигналам с блока 11 про исходит передача содержимого регистров 1 и 2 на первые входы сумматоров 5 и 6. Одновременно с этим содержимое регистров 1, 2 передается на вхо ды сдвигателей 3, 4, выходы которых соединены со вторыми входс1ми суммато ров 6 и 7. Величина сдвига определяется состоянием выходных шин дешифра тора 10. На сумматорах 5, 6 производится сложение или вычитание кодов в зависимости от состояния знакового разряда сумматора 7, который анализи руется блоком 11. Полученные значения передаются из сумматоров 5 и б в регистры 1 и 2. Одновременно с эти производится выборка угловой констан ты из блока 8 в сумматор 7, где вычисляется новое значение разности. Затем дешифратор 10 определяет нсялер следуклдей угловой, константы и производится вычисление новых значений координат и угла. После выполнения необходимого чис ла итераций результаты вычислений из егистров 1, 2 и сумматора 7 передатся на выход ycTpofljTBa и в блок кстраполяции, где участвуют в вычисении следующих экстраполированных начений координат и угла. Использоание новых элементов - дешифратора блока экстраполяции позволяет ислючить ненужные итерации в обработе заданных аргументов, устранить перацию коррекции результата и, как ледствие этого, увеличить быстроействия устройства. Формула изобретения Устройство для вычисления триго- . неметрических функций, содержащее два регистра координат, два сдвигателя, блок управления, два сумматора координат и сумматор аргумента,блок памяти, выход которого подключен к первому входу сумматора аргумента,к первым входам сумматоров координат подключены выходы соответствующих регистров координат,, ко второму входу первого сумматора координат подключен выход первого сдвигателя, а ко второму входу второго сумматора координат подключен выход второго сдвигателя, выходы первого и второго регистров координат подключены к первым входам второго и первого сдвиат ел ей, соответственно, о т л и ч а ющ е е с я тем,что,с целью повышения него введены быстродействи я, дешифратор и блок экстраполяции, к первому входу которого подключен первый выход сумматора аргумента,а ко второму входу - выход первого сумматора координат и первый вход первого регистра координат, к третьему входу - выход второго сумматора координат и первый вход второго регистра координат,к четвертому входу - первый выход блока управления, к первому выходу - второй вход первого регистра координат, ко второму выходу - второй вход второго регистра координат, а к третьему выходу второй вход сумматора аргумента,третий вход которого соединен со вторым выходом блока управления, и третьими входами сумматоров координат, второй выход со входом блока управления, а третий выход - со входом дешифратора , выход которого соединен со входом блока памяти и вторыми входами сдвигателей. Источники информации, принятые во внимание при экспертизе . 1. Малая универсальная вычислительная машина Наири-К. Техническое описание ПЫ 1. 700,000.ТО, часть 1У, 1970. 2. Оранский A.M. Быстродействующее устройство для вычисления синусно-косинусных функций. Вестник БГУ, Минск, 1969, сер. 1, 3 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислитель тригонометрических функций | 1978 |
|
SU746538A1 |
| Цифровой вычислитель обратного гиперболического тангенса | 1978 |
|
SU698002A1 |
| Устройство для поворота вектора | 1982 |
|
SU1076910A1 |
| Арифметическое устройство | 1978 |
|
SU780004A1 |
| Цифровой преобразователь координат | 1981 |
|
SU1076903A1 |
| Многоканальное операционное устройство | 1982 |
|
SU1124292A1 |
| Устройство для вычисления квадратного корня | 1979 |
|
SU883897A1 |
| Преобразователь координат | 1988 |
|
SU1566345A1 |
| Устройство для поворота вектора (его варианты) | 1982 |
|
SU1078431A1 |
| Цифровое устройство для вычисления синусно-косинусных функций | 1980 |
|
SU926651A1 |