1
Изобретение относится к маишностроению, а и енно , к, манипуляторам для механизации вспомогательных операций на машиностроительных препприятиях при штамповке,механической обработке, литьё под давле- нием и сборкеь
Известен манипулятор для механизации . вспомогательных операций технологических процессов машиностроительного производства ll .
Известный манипулятор имеет сложную конструкцию вследствие громоздкого привода и устройств управления при увеличении зоны обслуживаемого пространства.
наиболее I близок к предлагаемому изобретению манипулятор, содержащий механическую руку с приводом от силовых цилиндров
ЧЭтот манипулятор икгеет небольшую зону
обслуживаемого пространства.
.Цель изобретения - увеличение зоны обслуживаемого пространства.
Достигается она тем, что рука выполнена в виде телескопического механиз ла, а привод его внутреннего эвена снабжен пополг
нительным цилиндром, установленным последовательно основному цилиндру, при этом цилиндры смонтированы в полости этого звена.
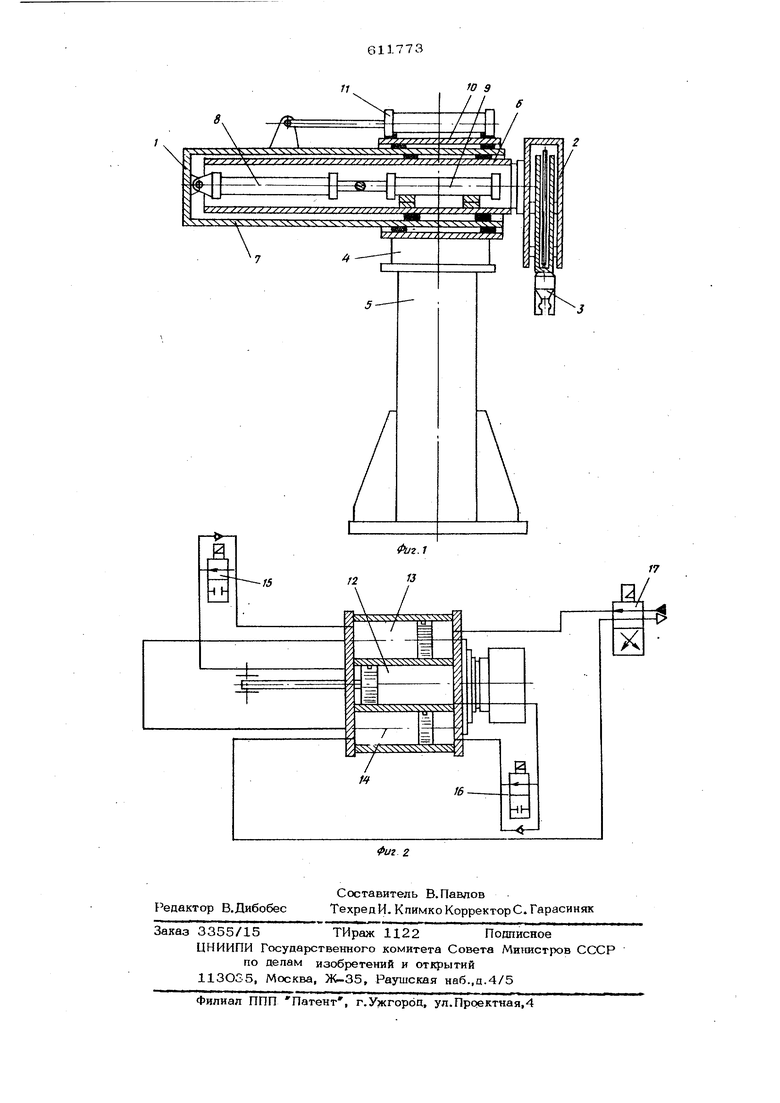
На фиг. 1 изображен описываемый манипулятор, продольный разрез ; на фиг.2 - ег гидравлическая .
Механическая рука манипулятора несет кисть 2 со схватом 3. Рука установлена на поворотный стол 4, смонтированный на cToiiKe 5. содержит внутреннюю пиноль
6,подвижную относительно средней пиноли
7.Внутри пиноли 6 установлены два пневмоцилиндра 8 и 9, ход которых равен 1/3 общего хода руки. Цилиндр 9 закреплен на пиноли 6, цилиндр 8 установлен между цилиндром 9 и пинолью 7. На неподвижной части Ю руки 1 установлен блок 11 пневмогидравлического привода.
Блок содержит гидроцилиндр 12, шток которого соединен L, пинолью 7 и два пнев- могидравлических цилиндра 13 и 14. Правая полость цилиндра 13 соединена с воздушной магистралью, а левая полость - с гидравлической магистралью с левой по -
лостью гидроцилиндра 12, /1свой полость шшиндра 14 соединена с поздуи;ной ма. гнст{)алью, а правая полость гидравлической маг;1стралью - с правой полостью гидропилиндра 12. Ход гидроцилиндра 12 равен 1/3 общего хода руки. В гидрома гистралях установлены элект})оупра вляемые двухпозидионные клапаны 15 н 16, в пневмомагистрали - электроуправляеьгый двух- позинионнын четырехходовой jiacnpeделитель 17.
При подаче воздуха в правую полость цилиндра 13 он нь1тесняет жидкость в гид- рошшиндр 12, и вместе с его штоком пи- 7 начинает двигаться из исходного положения вместе с пиноль.ю G. Жидкость из правой полости цилиндра 12 вытесняется в правую полость цилиндра 14. При команде на остановку подаётся электрический сиг нал на клапан 6, При закрытии клапана 6 жидкость запирается в гидроцилиндре 12,. и рука останавливается. При переклЬэчении распределителя 17 так же происходит движение в обратную сторону. Так осуществляется движение руки в пределах 1/3 её рабочего хода. Если следующие точки остаТ овки находятся на расстоянии от 1/3 до 2/3 полного хода руки, считая от её исходтшго положения, то вместе с блоком 11 включается пневмоцилиндр 9.
При подаче воздуха в поршневую полость цилиндра 9 его корпус вместе с пннолью 6 смещается вправо на 1/3 хода руки. Даль- ней1иее движение руки в пределах 2/3 её хода происходит за счёт движения пиноли 7 от гидроцилиндра-12. Если точки остановки находятся на расстоянии, более 2/3 полного хода руки, последовательно включаются
цилит дры 9 и 8. При подаче воздуха в неи1токовую полость шшиндра 8 он смешает вп|)аво цилиндр 9 вместе с пинолью 6 на величину 1/3 хода руки. Па следующую
треть хода руки пиноль 6 смешается под действием цилиндра 9.
Движение в пределах последней трети хода руки осуществляется посредством гид- роцилиндра 12, Движение полностью вытянутой руки в обратную сторону осуществляет ся при подаче воздуха в щтоковые полости цилиндров 8 и 9. При этом, в зависимости от заданного положения остановки, щток гидроцилиндра может двигаться вперед,например, если предыдущая точка остановки была на расстош1ии, несколько превыщающем 2/3 хода руки, а следующая точка остановки - на расстоянии, несколько меньшем 1/3 хода руки.
Формула изобретения
Манипулятор, содержащий механическую руку с приводом от силовых цилиндров, отличающийся тем, что, с целью увеличения зоны обслуживаемого пространства, рука выполнена в виде телескопического механизма, а привод его внутреннего звена снабжен дополнительным цилиндром, установленным последовательно основному цилиндру, при этом цилиндры смонтированы в полости этого звена.
Источн ики информации, принятые во вни- мание при экспертизе :,
1.Етелянин n.F. Промышленные роботы, Л1., Машиностроение, 1975.
2.Патент CUJA №3572519, кл, 214-1, 1971.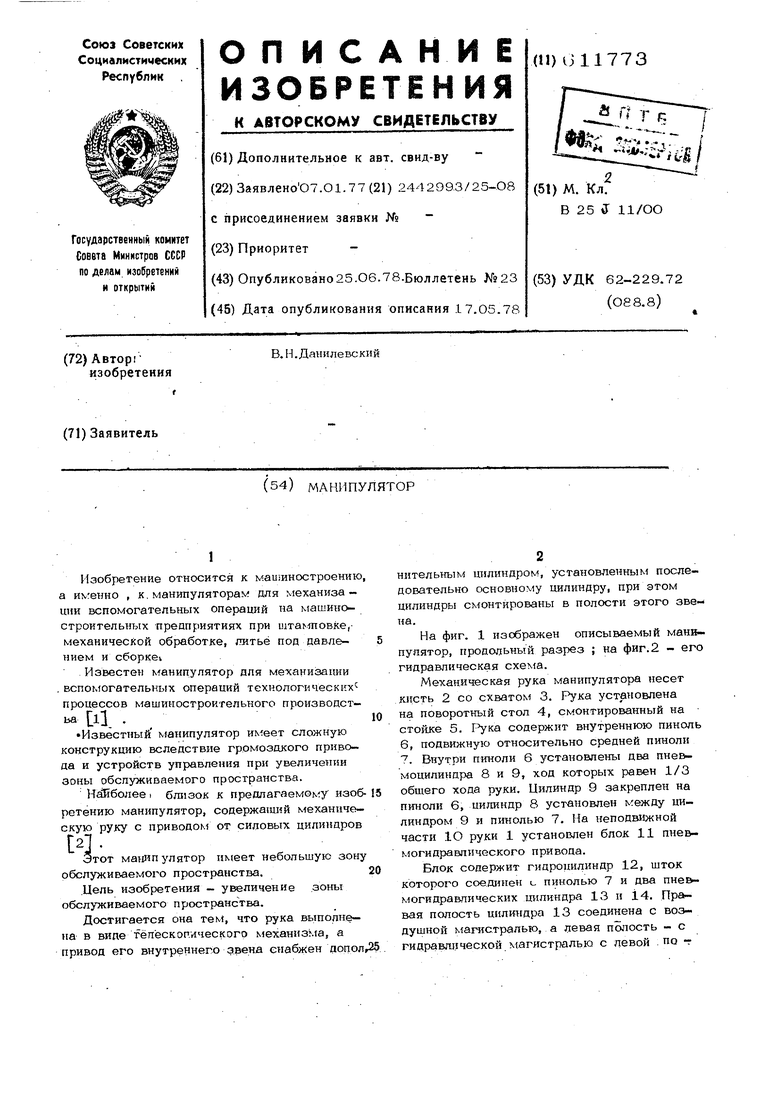
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1977 |
|
SU611774A1 |
| Манипулятор | 1976 |
|
SU598753A1 |
| Манипулятор | 1974 |
|
SU503713A1 |
| Промышленный робот | 1978 |
|
SU719865A1 |
| Автоматический манипулятор | 1981 |
|
SU963846A1 |
| Бухтосъемный манипулятор трубоволочильного стана с вертикальным барабаном | 1983 |
|
SU1168310A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Промышленный робот | 1984 |
|
SU1684019A1 |
| Пневмопривод | 1986 |
|
SU1404692A1 |