(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Манипулятор | 1981 |
|
SU1038219A1 |
| Автозагрузчик | 1980 |
|
SU1057269A1 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
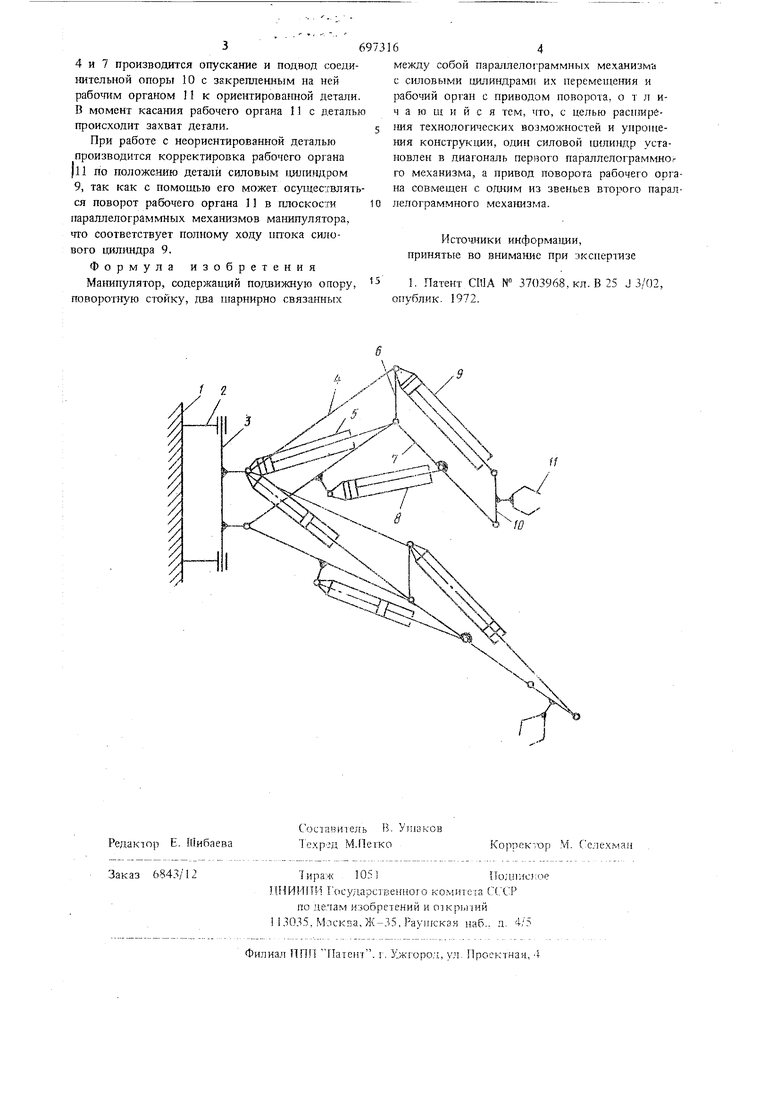
Изобретение относится к области машиностроения и может быть использовано в манипуляторах. Известен манипулятор, содержащий подвижную опору,-поворотную стойку, два шарнирно связанных между собой параллелограммных механизма с силовыми цилиндрами их перемещения и рабочий орган с приводом поворота 1 Недостатком известного устройства является сложность конструктивной схемы и небольшие технологические возможности. Цель изобретения устранение указанных недостатков. Это достигается благодаря тому, что один силовой ЦИЛ1ШДР установлен в диагональ первого параллелограммного механизма а привод поворота рабочего органа совмещен с одним из звеньев второго па)1ллелограммного механизма. Сундаогть изобретения поясняется чертежом, где представлена кинематическая схема манипулятора. Манипу 1лтор содержит подвижную опору 1, на кроннгтейяе 2 которой в подпгииниках установлсиа поворотная стойка 3. Крон1итейн пово (ютной стойки 3 с помощью двух пальцев uiapюфно связан с первым параллелограммным механизмом 4, в диагональ которого встроен силовой цилиндр 5. Ось проущинь корпуса силового цилиндра 5 совпадает с осью верхнего пальца кронштейна поворотной:стойки 3, а ось проушины его илока совпадает с нижней осью передаточного звена 6. которое является также стороной второго параллелограмлшого механизма 7. Оба параллелограммных механизма 4 и 7 соед1шекы посредством силового цилиндра 8, с помощью которого производится выдвигание механизма 7. Сторонами механизма 7 являются также силовой цилиндр 9 и соединительная oiropa 10, на которой крепится рабочий орган 11. Работа манипулятора заключается в следующем. Подвижная опора 1 останавливается около предмета подлежащего транспоргиронке. После чего производится поворот манипулятора в необхоД1 му10 сторону, а с помощью силовых цнпинДров 5 и 8 и параллелограммных механизмов
4 и 7 производится опускание и подвод (;оединителытой опоры 10 с закрепленным на ней органом 11 к ориентированной детали. В момент касания рабочего органа 11с деталью происходит захват детали.
При работе с неориентированной деталью производится корректировка рабочего органа
(И по 1юложе.нию детали силовым цилиндром 9, так как с помощью его может осуществляться поворот рабочего органа 1 в плоскости
параллелограм шых мехатшзмов ма1шпулятора,
что соответствует полному ходу пггока СШЕОвого цилиндра 9.
Формула изобретения Ма1шпулятор, содержащий подвижную опору.
поворотную стойку, два шарнирно связанных
i 2
между собой параллелограммных механизм с силовыми цилиндрами их перемещения и рабочий орган с приводом поворота, о т л ичающийся тем, что, с целью распшре1шя технологических возможностей и упрощения конструкции, о/дин силовой шшиндр установлен в диагональ первого пapaллeлoгpaм шoг го механизма, а привод поворота рабочего органа совмещен с одним из звеньев второго параллелограммного механизма.
Источники информации, принять е во внимание при экспертазе
N 3703968, кл. В 25 J 3/02,
ff
