(54) CHCTEf-lA УПРАВЛЕНИЯ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционный копирующий манипулятор | 1979 |
|
SU823115A1 |
| Дистанционный копирующий манипулятор | 1976 |
|
SU590136A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Устройство для управления копирующим манипулятором | 1981 |
|
SU987573A1 |
| Обратимая следящая система | 1980 |
|
SU903800A1 |
| Устройство для управления электромеханическим копирующим манипулятором | 1980 |
|
SU928297A1 |
| Следящая система | 1981 |
|
SU999016A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU286916A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Синхронно-следящая система | 1956 |
|
SU119566A1 |
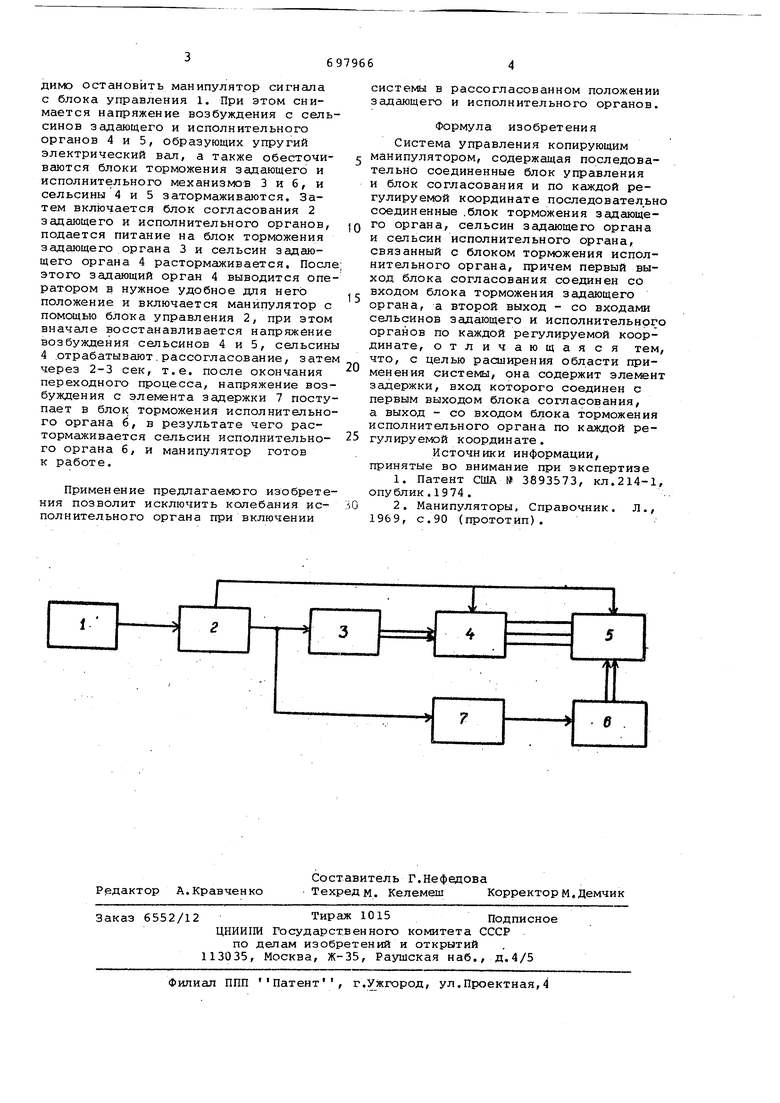
Изобретение относится к автоматике и может быть использовано при создании систем управления копирующим манипулятором с сельсикной передачей угла. Известна система управления ко пирующим манипулятором, содержащая задающий и исполнитечьный органы с установленными на них сельсинами и устройство, обеспечивающее различное соотнощение длин задающего и исполнительного органов 1, Однако известная система не допус кает углового рассогласования задающего и исполнительного органов. Наиболее близка предлагаемой по технической сущности система, содержащая последовательно соединенные блок управления и блок согласования и по каждой регулируемой координате последовательно соединенные блок торможения задающего органа, сельсин за,цающего органа, сельсин исполнительного органа, связанный с блоком торможения исполнительного органа, причем первый выход блока согласования соединен со входом каждого блока торможения задающего органа, а второй выход - со входаь-ш сельсинов задающего и исполнительного органов по каждой регулируемой координате 2. Недостатком этой систег- является наличие колебаний задающего и исполнительного механизмов (исполнительного в большей степени), вызываемые синхронизацией сельсинов при включении рассогласованных задающего и исполнительного механизмов. Цель изобретения - расширение области применения система. Указанная цель достигается тем, что система содержит элемент задержки, вход которого соединен с первым выходом блока согласования, а выход со входом блока торможения исполнительного органа по каждой регулируемой координате. На чертеже изображена функциональная схема предлагаемой система. Система содержит блок управления 1, блок согласования 2, блок торможения задающего органа 3, сельсин задающего органа 4, сельсин исполнительного органа 5, блок торможения исполнительного органа 6, элемент задержки 7. Система работает следу ощим образом. Для рассогласования осей задающего и исполнительного механизма необходиглэ остановить манипулятор сигнала с блока управления 1. При этом снимается напряжение возбуждения с сельсинов задающего и исполнительного органов 4 и 5, образующих упругий электрический вал, а также обесточиваются блоки торможения задающего и исполнительного механизмов 3 и 6, и сельсины 4 и 5 затормаживаются. Затем включается блок согласования 2 задающего и исполнительного органов, подается питание на блок торможения задающего органа 3 и сельсин задающего органа 4 растормаживается. После этого задающий орган 4 выводится оператором в нужное удобное для него положение и включается манипулятор с помощью блока управления 2, при этом вначале восстанавливается напряжение возбуждения сельсинов 4 и 5, сельсины 4 .отрабатывают, рассогласование, затем через 2-3 сек, т.е. после окончания переходного процесса, напряжение возбуждения с элемента задержки 7 поступает в блок торможения исполнительного органа б, в результате чего растормаживается сельсин исполнительного органа 6, и манипулятор готов к работе.
Применение предлагаемого изобретения позволит исключить колебания исполнительного органа при включении
системы в рассогласованном положении задающего и исполнительного органов.
Формула изобретения Система управления копирующим
манипулятором, содержащая последовательно соединенные блок управления и блок согласования и по каждой регулируемой координате последовател.ьно соединенные .блок торможения задающего органа, сельсин задающего органа и сельсин исполнительного органа, связанный с блоком торможения исполнительного органа, причем первый выход блока согласования соединен со входом блока торможения задающего органа, а второй выход - со входами сельсинов задающего и исполнительного органов по каждой регулируемой координате, отличающаяся тем, что, с целью расширения области применения системы, она содержит элемент задержки, вход которого соединен с первым выходом блока согласования, а выход - со входом блока торможения исполнительного органа по каждой ре5 гулируемой координате.
Источники информации, принятые во внимание при экспертизе
1969, с.90 (прототип).
1
