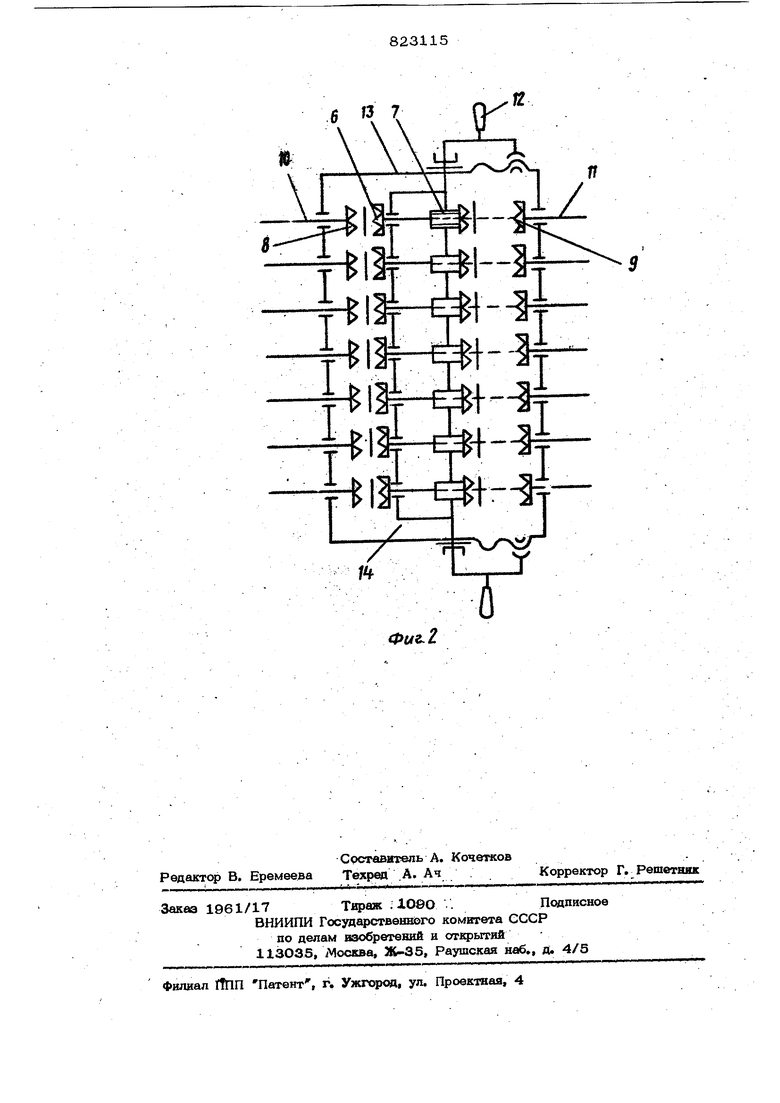
; ,.1 Изобретение относится к манипупяторо(Гфоеввю и может быть использовано в дястшвшонных коащ ующш1: манипупяторах. . Для повышения удобства обслуживания MammynflTqpa оп атором необходимо вв доЁше рассогласования в попожениях задаюшего и исполнительнсхго органов манипуля . Известен дистанционный копирующие мацвпулятор, содержащий задающий и исполнительный органы, соединенные 1саж даай помощи валов с сельсинами, располоисенными в моторных блоках, и устройство рассогласования .Ц}. Недостаток манипулятора - наличие колебаний задающего органа, выз1№аемые скшфонизацивй сельсинов, при включении рассогласова1Шых задающего и исполнител шлю органов. Что приводят к преждевременному изнашиванию механических чао тей задакяцего органа. Цель изобретения - повьпиенне надежности работы манипулятора за счет устранешш колебаний, возникающих 1фи пуске манипулятора с реюсог ласованш 1МИ задающим, и исполнительным органами. Указанная цель достигается тем, что устройство рассогласования содержит зубчатые муфты, расположенные на валах между задаюишм органом и его сельсинами, и штурвал, жестко соединенный с корпусом зубчатых муфт и соединенный с корпусом устройства рассогласования с возможностью перемещения относительно него. На фиг. 1 изображен щюдлагаемый манипулятор, общий вед; на фиг. 2 - функциональная схема устройства рассогласования. Манипулятор содержит рельсин 1 и 2 на задающем и исполнвтельном органах соединенные между собоА электрическими связями 3, и устройство 4 рассогласовав ВИЯ, установленное между ввдакйцим qpганом 5 и его сельсвнамк 1. Устройство рассогласования содержит рубчатые муфты 6 расположенные на валах 1О н 11 между задагкшям органом и его сельсинами штурвала 12, имеющего винтовое соединение с ксдэпусом 13 устройства рассогяасования и корпусом 14 зубчатых муфт 6 и 7, с помощью которого осуществляется зацепление и расцепление зубчатых муфт 6-9. Манипулятор работает следующим образом. Если в процессе работы оператору требуется произвести рассогласование задающего и исполнительного органов, то . необходимо вращением штурвала 12 переместить корпус 14 до расцепления муфт 6 и 8 и зацепления муфт 7 и 9. При этом механические валы 11 застопорены через муфты 7 и 9 на корпус 13, а валы 1О имеют свободное вращени относительно этого корпуса. Таким образом, оператсф получает вос;можность вывести задающий орган в любоо удобно для работы положение. При этом исполниташыоый орган своего положения не меняет, так как сельсины задающего органа заторможены. После выведения задающего органа в нужное положение «aiepaTqp вращает штурвал 12 в обратном направлении. При этом происходит расцепление муфт 7 и 9 и сцепление муфт 6 и 8. Таким образом, валы 11 имеют возможност ь свободно вращаться относительно корпуса 14, и движение пе редается от вала 11 к валу 1О. 54 Манипулятор готов к с рассогласованными, как удобно оператору, задающим и исполнительным органами При необходимости можно аналогично произвести согласование задающего и исполнительного органов. Формула изобретения Дистанционный копирующий манипулятор, содержащий задающий и исполнительный органы, соединенные каждый при помощи валов с сельсинами, расположенными в моторых блоках, и устройство рассо171асования, о т л. и ч а ю щ и И с я тем, что, с целью повьпиения надежности манипулятора, устройство рассогласования содержит зубчатые муфты, расположенные на валах между задающим органом и его сельсинами, и штурвал, жестко соединенный с корпусом зубчатых муфт и соединенный с корпусом устройства расссягласоваяия с возможностью перемещения относительного него. Источники инфс мации, Щ)И11ятые во внимание при экспертизе 1. Авторское сввдетельство СССР по заявке № 2591876/18-24, кл. В 253 13/ОО, 1978.
/
tW-l
б « 7
П

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления копирующим манипулятором | 1978 |
|
SU697966A1 |
| Дистанционный копирующий манипулятор | 1976 |
|
SU590136A1 |
| Обратимая следящая система | 1980 |
|
SU903800A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ ЧЕРЕЗ ГЕРМЕТИЧНУЮ СТЕНКУ | 1995 |
|
RU2156904C2 |
| Копирующий манипулятор | 1976 |
|
SU580979A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1977 |
|
SU627959A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Система дистанционного управления агрегатом | 1959 |
|
SU128923A1 |
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Привод манипулятора | 1972 |
|
SU436733A1 |