(54) ПНЕВМОВОЗ ТРУБОПРОВОДНОГО
КОНТЕЙНЕРНОГО ПНЕВМОТРАНСПОРТА

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для трубопроводного контейнерного пневмотранспорта | 1973 |
|
SU482372A1 |
| Пневмовоз трубопроводного контейнерного пневмотранспорта | 1977 |
|
SU1022910A1 |
| СИСТЕМА ОЧИСТКИ И ЭЛЕКТРОМАГНИТНОЙ ДИАГНОСТИКИ ТЕХСОСТОЯНИЯ СТАЛЬНЫХ ТРУБОПРОВОДОВ | 2018 |
|
RU2694466C1 |
| Устройство для остановки составаКОНТЕйНЕРОВ уСТАНОВКи ТРубОпРОВОд-НОгО пНЕВМОТРАНСпОРТА | 1976 |
|
SU793900A1 |
| Устройство для пневматического обрушения сыпучих материалов в бункере | 1980 |
|
SU901212A2 |
| УСТРОЙСТВО для ТРАНСПОРТИРОВАНИЯ ГРУЗОВв | 1972 |
|
SU335188A1 |
| Пневмовоз для транспортирования контейнеров по трубопроводам пневмотранспортных установок | 1980 |
|
SU878696A1 |
| СКВАЖИННЫЙ ИМПЛОЗИВНЫЙ ИСТОЧНИК СЕЙСМИЧЕСКИХ КОЛЕБАНИЙ | 2009 |
|
RU2447461C2 |
| Камерный питатель для пневматического транспортирования сыпучего материала | 1989 |
|
SU1687541A1 |
| ВНУТРИТРУБНЫЙ ПРОФИЛОМЕТР | 2014 |
|
RU2572221C1 |
1
Изобретение относится к области трубопроводного контейнерного пневмотранспорта, а именно к конструкции пневмовоза.
Известен пневмовоз трубопроводного кон-тейнерного пневмотранспорта, содержащий цилиндрический обтекаемый корпус на колесном ходу, зластичные подвижные манжеты, резервуар со сжатым воздухом, расположенный внутри корпуса, и электронный блок )травления, элекрически связан1а,1Й с блоком приема сигналов и с приводом клапанов подачи сжатого воздуха 1. Эластичные подвижные манжеты yicpenлены на поворотных рычагах, шаргшрно связанных со штоком пневмоцилиндра, питаемого от резервуара со сжатым воздухом.
Однако этот пневмовоз имеет сложную-конструкцию привода манжет и узкий диапазон регулирования скорости и изменения тягового усилия, так как он не обеспечивает аварийную остановку, торможение состава транспортируемых им контейнеров в заранее установленных местах трубопровода или замедление движения состава в любой произвольной точке трубопровода.
Целью изобретения является упрощение конструкции и расширение диапазона регулирования скорости движения пневмовоза.
Эта цель достигается тем, что манжеты выполнены в виде складных пневматических шин с изменяюш мися протекторами, внутренние полости которых соединены с клапанами подачи сжатого воздуха. Корпус охвачен трубой, имеющей перфорированные ушстки и образующей кольцевой промежуток с поверхностью корпуса для перепуска потока воздуха, в котором установлен эластичный затвор, внутренняя полость которого соединена с клапанами подачи сжатого воздуха, а пневматические ппшы смонтированы на наружной поверхности трубы между ее перфорированными участками.
По обоим концам корпуса расположены отсеки, сообщенные с внутренней полостью трубопровода и через обрат1п 1е клапаны с резервуаром сжатого воздуха.
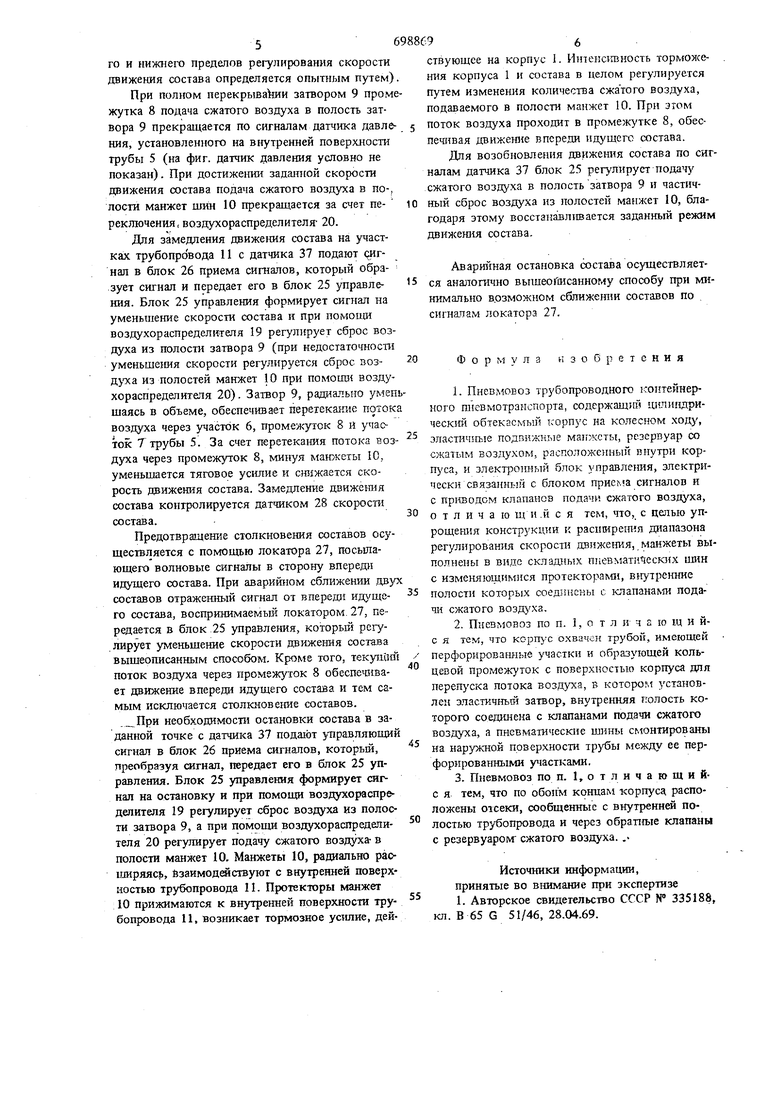
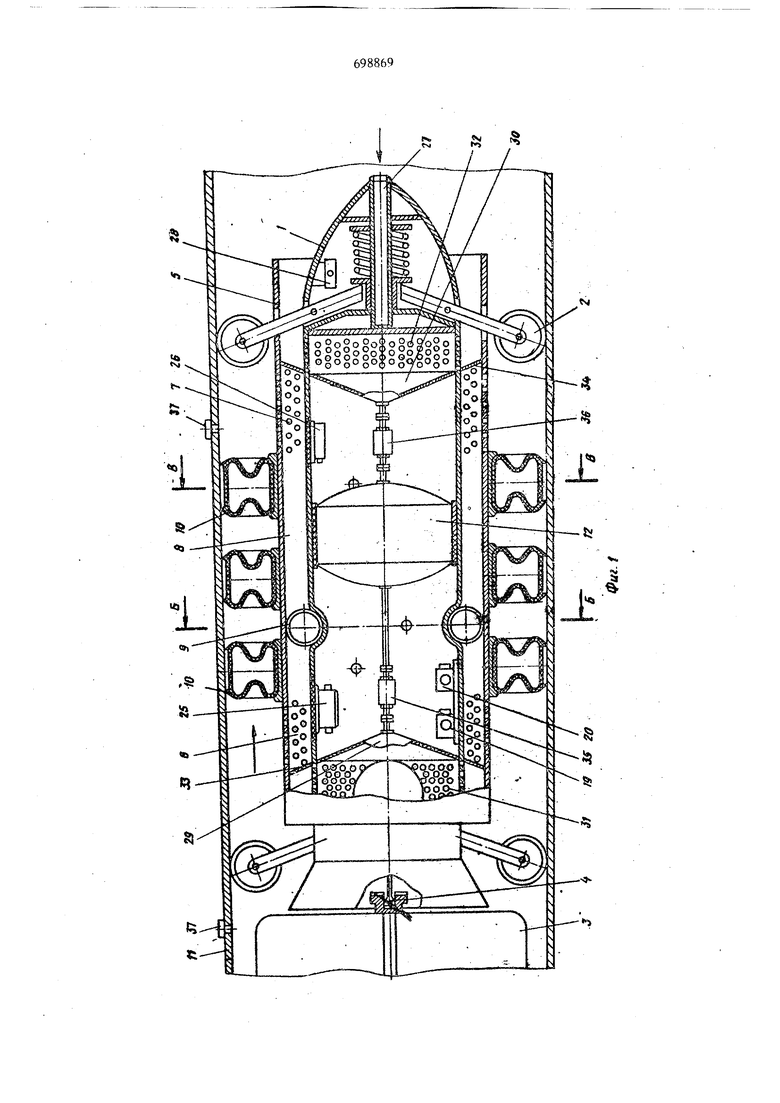
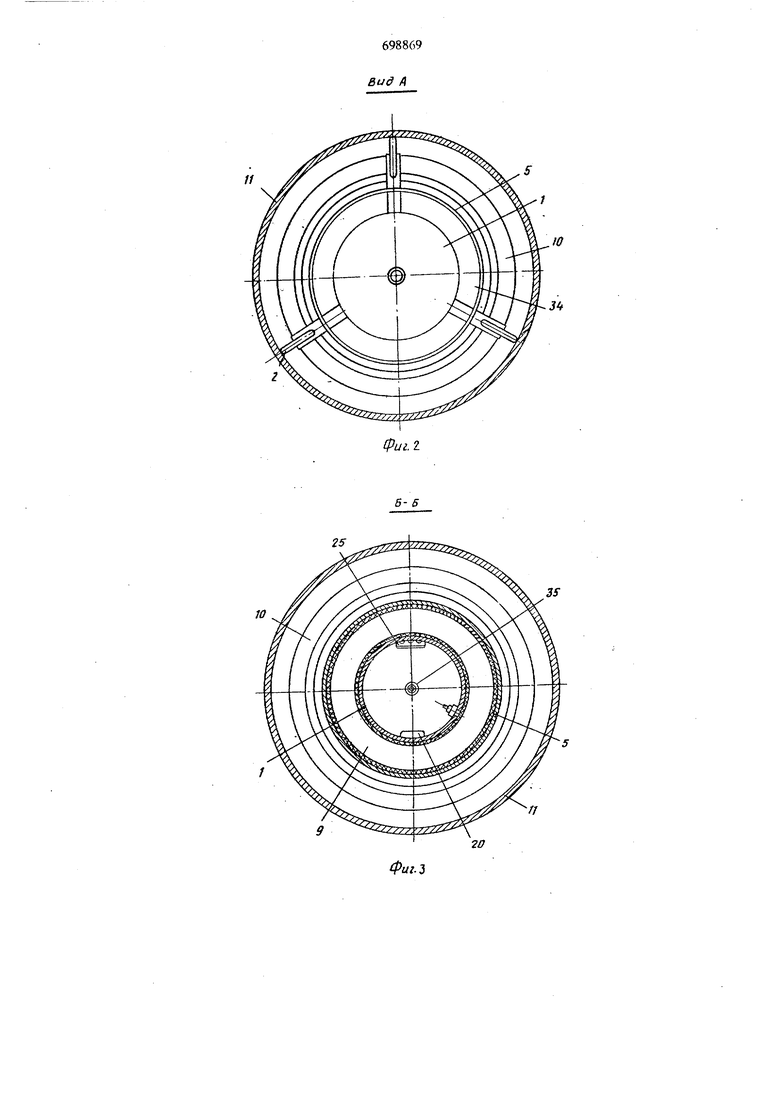
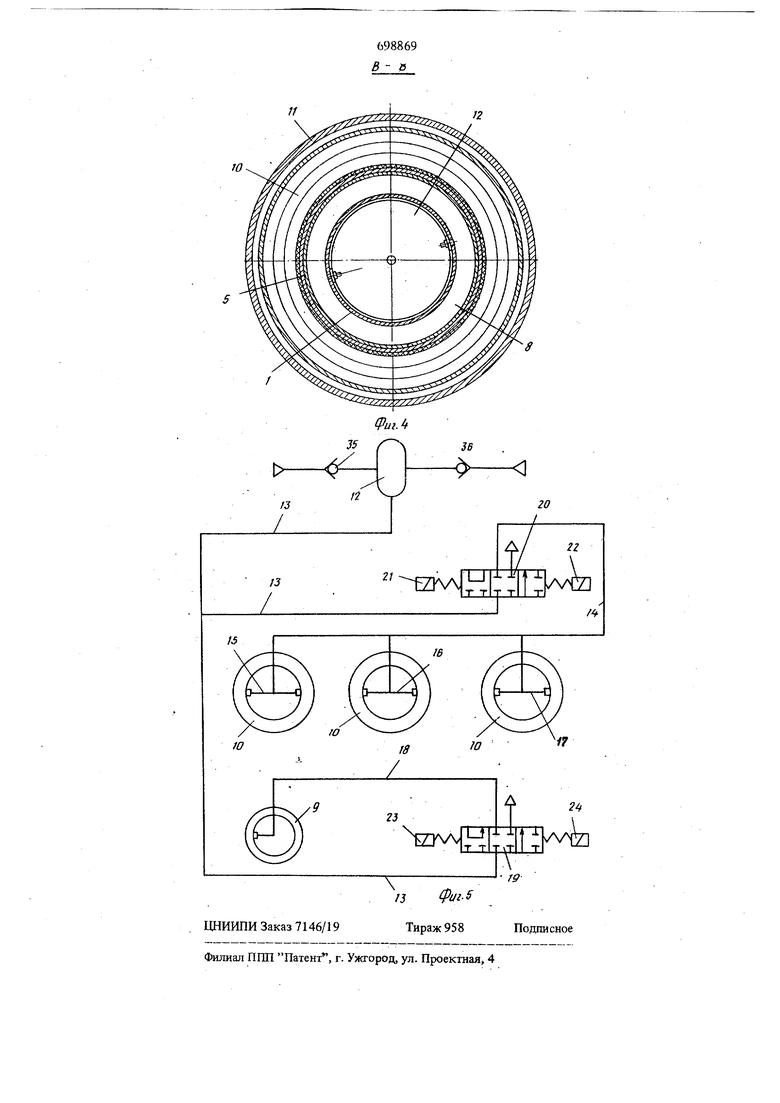
На фиг. 1 изображен предлагаемый пневмовоз в разрезе; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 369принципиальная пневматическая схема управления шинами и затвором. Пневмовоз имеет цилиндрический обтекаемый корпус 1, смонтированный на самоцентрируюпдахся роликах 2 и установленный, в гоЛОБНОЙ части состава контейнеров 3, шарнирно соеданенных между собой. Корпус 1 прикреплен: к составу контейнеров 3 с помощью шаровой сцепки 4. Корпус 1 охвачен трубой 5 с пер форированными участками 6 и 7, образующей кольцевой промежуток 8 с поверхностью корпуса 1 для перепуска потока воздуха при торможении. Труба 5 прикреплена к корпусу 1 при помощи стоек, обеспечивающих коаксиальное расположение трубы 5 с корпусом 1. В промежутке 8 установлен эластичный затвор 9 для регулирования скорости движения состава. На наружной поверхности трубы 5 между ее участками 6 и 7 у реплены эластичные подвижные манжеты 10, выполненные в виде склад пых пневматических шин с изме 1яющимися про текторами. Шины предназначены для перемещения по трубопроводу 11 цилиндрического корпуса и присоединенного к нему состава из контейнеров, для регулирования скорости движения состава и тягового усилия. Шипы взаимодействуют с внутренней поверхностью трубопро вода 11 при остановках или торможеггаи состава в заранее;установленных местах трубопровода. Внутри корпуса 1 размещен резервуар со сжатым воздухом, выполненный в виде пневмо аккумулятора 12. Пневмоаккумулятор 12 связан системой трубопроводов 13-18 с полостями затвора 9 и манжет 10 через клапаны, выполненные в виде-воздухораспределителей 19 и 20 с пртодами 21, 22 и 23, 24. Приводы 21-24 электрически связаны с электронным программным блоком 25 управления. Блок 25, кроме того, электрически связан с блоком 26 приема сигналов, локатором 27, расположенным в головной части корпуса 1, и датчиком 28 ско рости состава. Датчик 28 скорости состава связан с роликом 2 (связь дат1шка 28 скорости состава с роликом 2 условно не показана). В корпусе 1 вьшолнено два отсека 29 и 30 которые расположены в задней и передней частях копруса. Отсеки 29 и 30 сообщены через перфорированные участки 31 и 32 корпуса 1 с промежутком 8. В промежутке 8 установлены герметизированные кольцевые перегородки 33 и 34, отделяющие участки 6 и 7 дополнител ной трубы от перфорированных участков 31 и 32 корпуса 1. Отсеки 29 и 30 сообщены через обратные клапаны 35 и 36 с пневмоаккумулятором 12. Отсеки 29 и 30 совместно с перегородками 33 и 34 и участками 31 и 32 корпуса 1 предназначены для подзарядки пневмоаккумулятора 12 за счет давления сжатого воздуха агнетательной компрессорной.установки, переключаемой на режим подзарядки пневмоаккумуляторов 12, или при образовании в трубопроводе пневмобуфера. Подзарядка (основная) невмоаккумулятора 12 осуществляется иа риемно-отправочных станциях. Давление сжаого воздуха в пневмоаккумуляторе 12 контролируется измерительным прибором давления (условно на фиг. не показан), который электрически связан с блоком 25 управления. В корпусе 1 установлена аккумуляторная батарея (условно не показана) для питания постоянным током пиевмоаккумулятора 12 (подогрев воздуха), блоков 25, 26, локатора 27 и датчика 28 скорости состава. На трубопроводе 11 расположены путевые функциональные датчики 37 для управления движением составов. Датчики 37 электрически связаны с центральным пультом управлешш, расположенным на одной из приемно-отправочных станций.. Пневмовоз работает следуюш гм образом. В исходном состоянии затвор 9 и манжеты 10 занимают минимальные объемы, из внутренних полостей которых воздух сброшен в полость трубопровода 11. Для приведения в действие пневмовоза с центрального пульта управления включается нагнетательная компрессорная установка (на фиг.1 условно не показана). При этом поток воздуха перетекает между внутренней поверхностью трубопровода II и наружными поверхностями корпусов контейнеров 3, наружными поверхностями манжет 10 корпуса I, а также через промежуток 8, образованный корпусом 1 и трубой 5. Для разгона и вьшода состава на заданный режим движения с заданной скоростью и тяговым усилием от датчика 37 поступает управляющий сигнал, который воспринимается блоком 26 приема сигналов. Блок 26 приема сигналов преобразует и передает его в блок 25 управления. Блок 25 управления в соответствии с заданным алгоритмом управления в импульсном режиме переключает воздухораспределители 19 и 20. Воздухораспределители 19 и-20, переключаясь, подают сжатый воздух из пнеемоаккумулятора 12 по системе трубопроводов 13-18 во внзгфешше полости затвора 9 и манжет 10. Затвор 9 и манжеты 10, радиально расширяясь, перекрьшают промежуток 8 и кольцевой зазор между наружной поверхностью манжет 10 и внутренней поверхностью трубопровода 11. Подача сжатого воздуха из пневмоаккумулятора 12 контролируется по сигналам датчика 28 скорости состава. При увеличении скорости движения состава подача сжатого воздуха в полости затвора и шин возрастает до обеспечения заданной скорости движения состава (уставки верхнего и нижнего пределов регул 1рования скорости движения состава определяется опытным путем) При полном перекрывании затвором 9 пром жутка 8 подача сжатого воздуха в полость затвора 9 прекращается по сигналам датчика давле ния, установленного на внутренней поверхности трубы 5 (на фиг. датчик давления условно не показан). При достижении заданной скорости движения состава подача сжатого воздуха в полости манжет шин 10 прекращается за счет переключения, воздухораспределителя- 20. Для замедления движения состава на участках трубопровода 11с датчика 37 подают сигнал в блок 26 приема сигналов, который образует сигнал и передает его в блок 25 управления. Блок 25 управления формирует сигнал на уменьшение скорости состава и при помощи воздухораспределителя 19 регулирует сброс воз духа из полости затвора 9 (при недостаточности уменьше1шя скорости регулируется сброс возлуха из полостей манжет 10 при помощи воздухораспределителя 20). Затвор 9, радиально умен щаясь в объеме, обеспечивает перетекание поток воздуха через участок 6, промежуток 8 и участок Т трубы 5. За счет перетекания потока воз духа через промежуток 8, ми1гуя манжеты 10. уменьшается тяговое yciume и сш1жается скорость движения состава. Замедление движеш1я состава контролируется датчиком 28 скорости состава. Предотвращею5е столкновегшя составов осуществляется с помощью локатора 27, посьшающего волновые сигналы в сторону впереди идущего состава. При аварийном сближении .дву составов отражешгый сигнал от впереди идущего состава, воспринимаемый локатором. 27, передается в блок 25 управления, который регулирует уменьщение скорости движе шя состава выщеописанным способом. Кроме того, текуг-Шш поток воздуха через промежуток 8 обеспечивает движение впереди идущего состава и тем самым исключается столкновение составов. ..При необходимости остановки состава в заданной точке с датчика 37 подшот -правллющий сигнал в блок 26 приема сигналов, которьш, преобразуя сигнал, передает его в блок 25 управления. Блок 25 управления формирует CHI нал на остановку и при помощи воздухораспределителя 19 регулирует сброс воздуха из полости затвора 9, а при помощи воздухораспределителя 20 регулирует подачу сжатого воздуха- в полости манжет 10, Манжеты 10, радиально расширяясь, йзаимодетствуют с внутренней поверхностью трубопровода П. Протекторы манжет 10 прижимаются к внутренней поверхности трубопровода 11, возникает тормозное усилие, дей96ствующее на корпус i. Ин1енс1тиость торможения корпуса 1 и состава в целом регулируется путем изменения количества сжатого воздуха, подаваемого в полости манжет 10. При этом поток воздуха проходит в промежутке 8, обеспечивая дви.жение впереди идущего состава. Для возобновлеЕШя движения состава по сигналам датчика 37 блок 25 регулирует-подачу сжатого воздуха в полостьзатвора 9 и частичный сброс воздуха из полостей манжет 10, благодаря этому восстанавл гоается заданный режим движеш1я состава. Аварийная остановка состава осуществляется аналогично вышеоГшсанному способу при минимально в.озможном сближении составов по сигналам локатора 27. Формула изобретения 1.Пневмовоз трубопроводного ютптейнерного пневмотранспорта, содержащий щлиндрический обтекаемый к-орпус на колесном ходу, эластичные подпижкые манжеты, резервуар со сжатым воздухом, расположенный шгутри корпуса, и злектропньтй блок управления, злектрнчески связанный с блоком приела сигналов и с приводом клапанов сжатого воздуха, отличаю щ н.й с я тем, что, с целью упрощеьшя конструкции к расншре шя диапазона регулирования скорости движения, манжеты выполнены в виде складных пневматических шин с изменяющимися протекторами, В1тутренние полости которых соед П5екы с клапанами подачи сжатого воздзха. 2.Пневмовоз но п. 1, о т л и ч а ю щ и йс я тем, что Kopnjc охвачен трубой, имеющей перфорироваш1ые участки и образующей кольцевой промежуток с поверхностью корпуса для перепуска потока воздуха, в которол установлен эластичный затвор, внутренняя полость которого соединена с клапанами подачи сжатого воздуха, а пневматические шины смонтированы на наружной поверхности трубы между ее перфорированными участками. 3.Пневмовоз по п. 1, о т л и ч а ю щ и йс я тем, что по обоим концам -корпуса расположены отсеки, сообщенные с внутренней полостью трубопровода и через обрат1П)1е клапаны с резервуаром сжатого воздуха... Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 335188, кл. В 65 G 51/46, 28.04.69.
25
10 вид А
J«
3f
//
