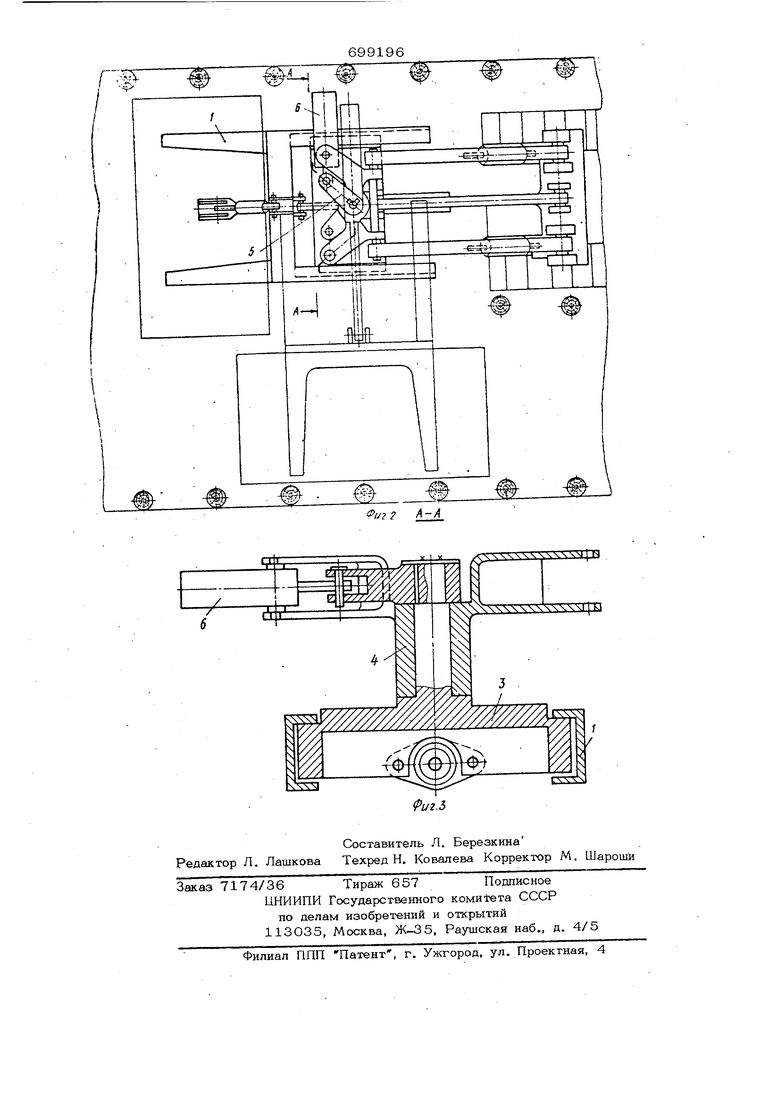
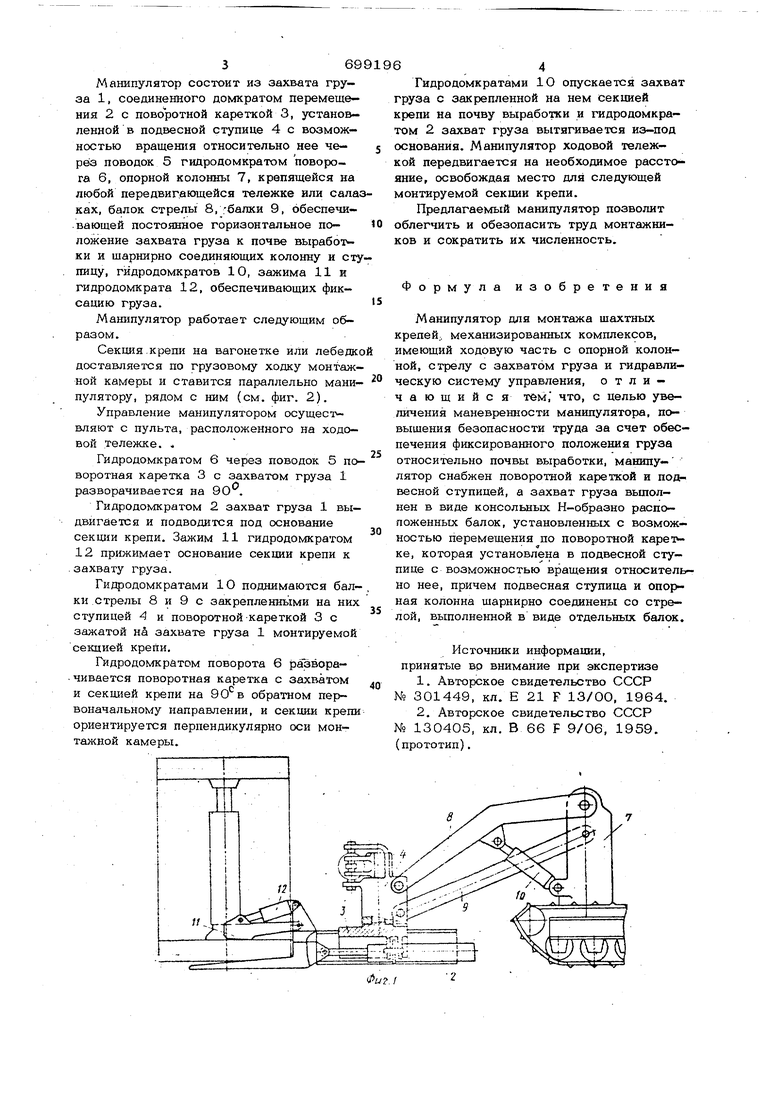
i Изобретение относится к оборудованию для горной промъ1шленности. Известны устройства для монтажа шахтных крепей механизированных компле сов, имеющие ходовую часть, поворотную платформу, стрелу и рабочий орган. Стре ла снабжена дополнительной стрелой, шарнирно соединенной с ней, и гидродомкратом, .расположенным в вертикальной плоскости. Корпус гидродомкрата шарнирно соединен со стрелой, а шток - с дополнительной стрелой l. Наиболее близким к изобретению явлеятся манипулятор для монтажа шахтных крепей механизированных комплексов, имеюгций ходовую часть с опорной колонной, стрелу с захватом груза и гидравлическую систему управления 2. Одаако в таких устройствах отсутствие фиксированного положения груза уве- личивает опасность обрушения освобожден ной от крепления кровли и срът с захватом, что снижает безопасное ведение монтажных работ. Цель изобретения - увеличение маневренности ма1шпулятора, повышение безо- пасноста труда за счет обеспечения фиксированнйго положения груза относительно почвы вырабощи. Это достигается тем, что манипулятор снабжен поворотной кареткой и подвесной ступидей, а захват груза выполнен в виде консольных Н-образно расположенных балок, установленных с возможностью перемещения по поворотной каретке, которая установлена в подвесной стутшце с возможностью вращения относительно нее, причем подвесная ступица и опорная колонна шарнирно соединены со стрелой, выполненной в виде отдельных балок. Это обеспечивает увеличение маневренности и повышение безопасности в стесненньрс условиях горных вьфаботок. На фиг. 1 изображен предлагаемый манипулятор, вид сбоку; на фиг. 2 То же, -вид в плане; на фиг. 3 - разрез А - А на фиг. 2. Манипулятор состоит из захвата груза 1, соединенного домкратом перемещения 2 с поворотной кареткой 3, установленной в подвесной ступице 4 с возможностью вращения относительно нее через поводок 5 гидродомкратом поворота 6, опорной колонны 7, крепящейся на любой передвигающейся тележке или сала ках, балок стрелы 8, -балки 9, обеспечи. веющей постоянное горизонтальное положение захвата груза к почве вырабо- ки и шарнкрно соединяющих колонну и сту пицу, гйдродомкратов 10, зажима 11 и гидродомкрата 12, обеспечивающих фиксацию груза. Манипулятор работает следующим образом. Секция.крепи на вагонетке или лебедк доставляется по грузовому ходку монтаж ной камеры и ставится параллельно манипулятору, рядом с ним (см. фиг. 2). Управление манипулятором осущест вляют с пульта, расположенного на ходовой тележке. Гидродомкратом 6 через поводок 5 по воротная каретка 3 с захватом груза 1 разворачивается на ЭО. Гидродомкратом 2 захват груза 1 выдвигается и подводится под основание секции крепи. Зажим 11 гидродомкратом 12 прижимает основание секции крепи к .захвату груза. Гидродомкратами 1О поднимаются балки стрелы 8 и 9 с закрепленнь1ми на них ступицей 4 и поворотной-кареткой 3 с зажатой ни захвате груза 1 монтируемой секцией крепи. Гидродомкратом поворота 6 развора.чивается поворотная каретка с захватом и секцией крепи на 90 в обратном пер воначальному направлении, и секции крепи ориентируется перпендикулярно оси монтажной камеры. Гидродомкратами 10 опускается захват груза с закрепленной на нем секцией крепи на почву выработки и гидродомкратом 2 захват груза вытягивается из-под основания. Манипулятор ходовой тележкой передвигается на необходимое расстояние, освобождая место для следующей монтируемой секции крепи. Предлагаемый манипулятор позволит облегчить и обезопасить труд монтажников и сократить их численность. Формула изобретения Манипулятор для монтажа шахтных крепей., механизированных комплексов, имеющий ходовую часть с опорной колонной, стрелу с захватом груза и гидравлическую систему управления, отличающийся тем, что, с целью увеличения маневренности манипулятора, повышения безопасности труда за счет обеспечения фиксированного положения груза относительно почвы выработки, машшулятор снабжен поворотной кареткой и подвесной ступицей, а захват груза вьшолнен в виде консольных Н-образно расположенных балок, установленных с возможностью перемещения по поворотной Kapei ке, которая установлена в подвесной ступице с возможностью вращения относительно нее, причем подвесная ступица и опорная колонна шарнирно соединены со стрелой, выполненной в виде отдельных балок. Источники информации, принятые вр внимание при экспертизе 1.Авторское свидетельство СССР № 301449, кл. Е 21 F 13/00, 1964. 2.Авторское свидетельство СССР № 130405, кл. В 66 F 9/06, 1959. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтный кран | 1980 |
|
SU883472A1 |
| Шахтный кран | 1978 |
|
SU804840A1 |
| КРЕПЬ СОПРЯЖЕНИЯ | 1992 |
|
RU2072050C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| Станок для монтажа и демонтажа механизированной крепи | 1987 |
|
SU1461978A1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| Монтажный станок для механизированнойКРЕпи | 1979 |
|
SU840382A1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1982 |
|
SU1084455A1 |
| Устройство для монтажно-демонтажных работ в горной выработке | 1990 |
|
SU1719653A1 |