(54) МЕХАНИЗМ ШАРНИРА РУКИ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Мезанизм шарнира манипулятора | 1979 |
|
SU848356A2 |
| Механизм шарнира руки манипуля-TOPA | 1979 |
|
SU848355A2 |
| Механизм шарнира руки манипулятора | 1984 |
|
SU1214411A2 |
| Шарнир манипулятора | 1979 |
|
SU844270A1 |
| Хобот манипулятора | 1979 |
|
SU870107A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| ПЕРЕДАЧА "МИГ" | 2009 |
|
RU2407931C1 |
| Манипулятор | 1982 |
|
SU1065184A1 |
| ВАРИАТОР "МИГ" | 2009 |
|
RU2405115C1 |
1
Изобретение относится к робототехнике и .может быть использовано в промышленных роботах различного назначения, .манипуляторы которых включают шарнирно сочлененные звенья.
Известен механизм шарнира руки манипулятора, содержащий промежуточное звено, соединенное посредство.м крестовин с предыдущим и последующим звеньями 1.
Недостатко.м данного механизма является сложность конструкции, так как предыдущее и последующие звенья содержат больщое число приводов.
Цель изобретения - уменьщение числа приводов при сохранении зоны досягаемости последующего звена, т. е. упрощение конструкции.
Это достигается тем, что в предлагаемом механизме промежуточное звено снабжено двуплечим рычагом, на концах которого смонтированы оси, на одно.м конце - посредством поступательной пары, а на другом - шарнирно, причем первая ось связана с предыдущим звеном щарнирно, а вторая ось с последующим звеном - поступательной парой.
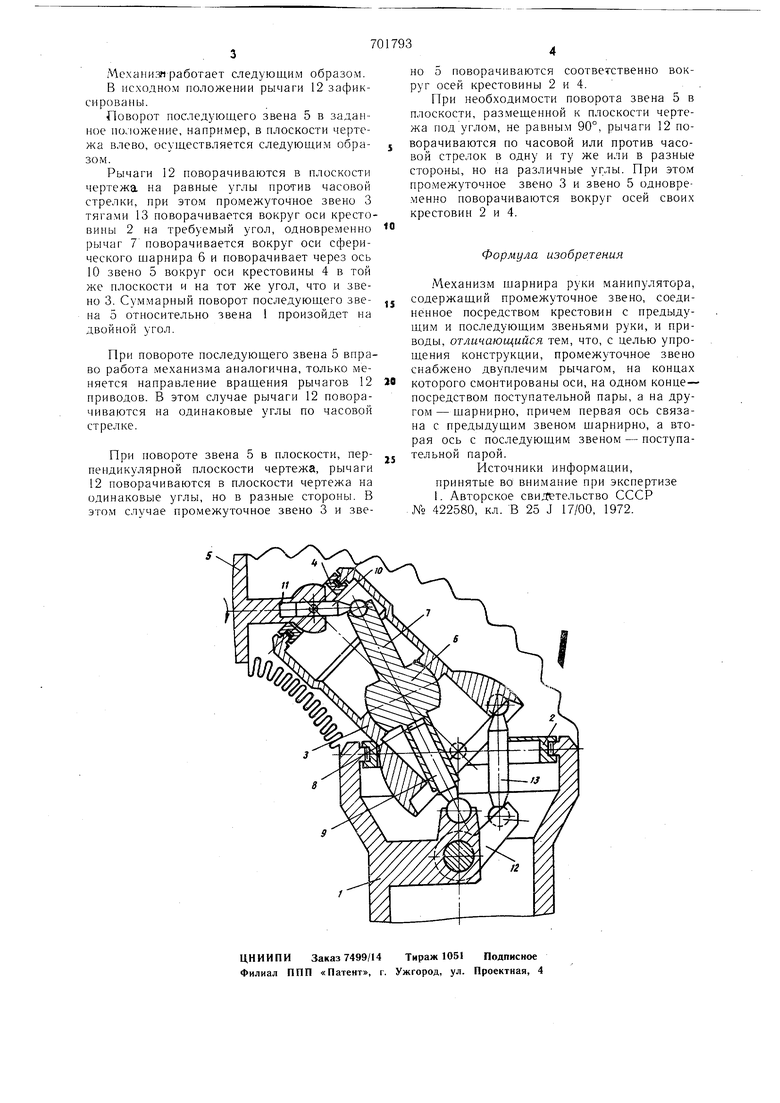
На чертеже показан описываемый механизм шарнира руки манипулятора.
Он содержит предыдуп1ее звено 1. щарнирно связанное посредством крестовины 2 с промежуточным звеном 3. которое, в свою очередь, посредством крестовины 4 также шарнирно связано с последующим звеном 5. В про.межуточном звене при помощи сферической опоры 6 установлен двуплечий рычаг 7, на одном конце которого выполнен паз
Для всех степеней свободы руки манипулятора имеют соответствующие приводы (не показаны).
На звене 1 установлены рычаги 12 с тягами 13, связанными сферическими шарнирами как с тягами 12, так и с промежуточным звеном (число рычагов 12 и тяг 13 не менее двух).
