Изобретение относится к робототехнике и может быть использовано в промышленных роботах различного назначения, манипуляторы которых „включают шарнирно сочлененные звенья.
Цель изобретения - повышение. маневренности руки манипулятора.
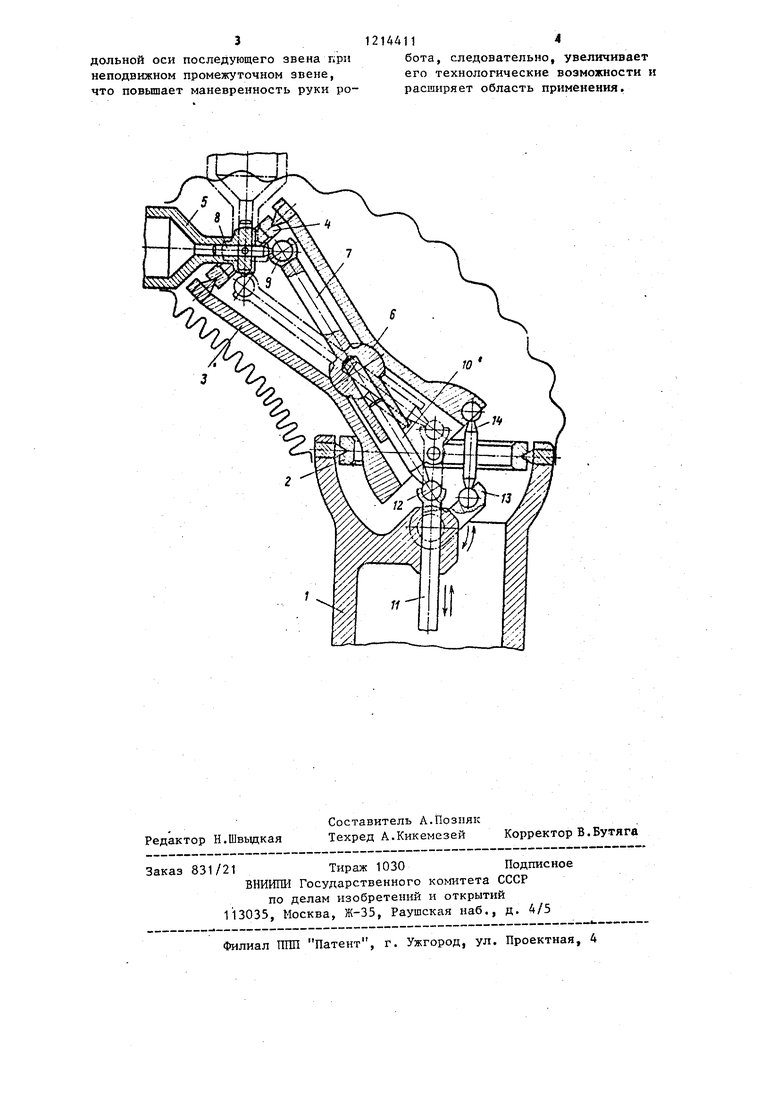
На чертеже схематически показан предлагаемьй механизм.
Механизм шарнира руки манипулятора содержит предыдущее звено 1, связанное шарнирно посредством кретовины 2 с промежуточным звеном 3, которое также шарнирно посредством крестовины 4 соединено с последующим звеном 5.
В промеж точном звене 3 при помощи сферической опоры и шарнира б закреплен двуплечий рычаг 7. На концах рычага установлены ось 8 посредством сферического шарнира 9 и ось 10 посредством поступательной пары. Ось 8 соединена также поступательной парой с последующим звеном 5, На предыдущем звене 1 с возможностью перемещения вдоль оси звена смонтирован приводной толк атель 1
Ось 10 одним из кондов соединена посредством сферического шарнира 12 с толкателем 11.
Механизм шарнира приводится в :движение двумя приводами (не показаны) через рычаги 13 у. тяги 14 и дополнительньм приводом - (не показан) через толкатель 11.
Механизм работает следующим образом.
С исходном положении рычаги 13 и тяги 14 зафиксированы. Толкатель 11 находится в нижнем положении и зафиксирован. Поворот последующего звена 5 на. максимальный угол, например, в плоскости чертежа влево осуществляется следующим образом. Рычаги 13 поворачиваются в плоскости чертежа на равные углы против часово стрелки, при этом промежуточное звено 3 тягами 14 поворачивается вокруг оси крестовины 2 на требуемьй угол. Одновременно рычаг 7 поворачивается вокруг оси сферического шарнира б и поворачивает через сферический шарнир 9 звено 5 вокруг оси крестовины 4 в той же плоскости, что и звено 3.
.
2144112
Для поворота последующего 5 п плоскости чертежа вправо без изменения положения промежуточного звена 3 включают прийод, связанный J с толкателем 11, который перемещает его вверх вдоль оси звена 1 (тяги 14 зафиксированы).
При перемещении толкателя ось 10 перемещается вдоль рычага 7 и пово- 1Q рачивается в шарнире, при этом
рычаг 7 поворачивается относительно опоры влево, ось 8 поворачивается в шарнире 9 и перемещается вдоль после дующего звена 5, поворачивая его 15 вправо (показано пунктирной линией).
Если толкатель 11 зафиксирован в верхнем положении в начале движения, то последующее звено 5 при повороте рычагов 13 перемещается 2Q параллел ьно предыдущему звену.
При повороте последующего звена вправо работа механизма аналогич5
0
5
0
5
0
5
вращения рычагов 13 привода. В этом случае рычаги поворачиваются на одинаковые уг.пы по часовой стрелке.
При повороте звена 5 на максимальный угол в плоскост°и, перпендикулярной плоскости чертежа, рычаги 13 поворачиваются в плос кости чертежа на одинаковые углы, но в разные стороны. В этом случае промежуточное звено 3 и звено 5 поворачиваются вокруг осей крестови 2 и 4 соответственно.
Для изменения направления продольной оси последующего звена при различных положениях промежуточного звепа вкл1очают привод, перемещающий толкатель 11.
При необходимости поворота звена 5 в любой плоскости под углом, не равным максимальному, рычаги 13 поворачиваются по или против часовой стрелки в одну и ту же или в разные стороны на различные углы. При этом промежуточное звено 3 и звено 5 одновременно, поворачиваются вокруг осей своих крестовин 2 и 4.
При необходимости изменения направления продольной оси последующего эвена 5 перемещают толькатель 11.
Таким образом, предлагаемый механизм шарнира руки манипулятора помимо перемещения последующего звена в любой плоскости обеспечивает возможность изменения направления про312144114
дольной оси последующего звена при бота, следовательно, увеличивает неподвижном промежуточном эвене, его технологические возможности и что повышает маневренность руки ро- расширяет область применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мезанизм шарнира манипулятора | 1979 |
|
SU848356A2 |
| Механизм шарнира руки манипуля-TOPA | 1979 |
|
SU848355A2 |
| Манипулятор | 1984 |
|
SU1273243A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| Манипулятор | 1990 |
|
SU1722807A1 |
| Механизм шарнира руки манипулятора | 1978 |
|
SU701793A1 |
| Механическая рука | 1978 |
|
SU738863A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| МЕХАНИЗМ ШАРНИРА МАНИПУЛЯТОРАВ П ТБ | 1972 |
|
SU422580A1 |
| УПРАВЛЯЕМЫЕ САНИ ДЛЯ НАТУРБАНА | 1991 |
|
RU2051056C1 |
Редактор Н.Швьщкая
Составитель А.Позняк
Техред А.Кикемезей Корректор В.Бутяга
Заказ 831/21Тираж 1030Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.в....,в..-.-.-.-.,. - -- - - - ---- - --- ------- - -
Филиал гаШ Патент, г. Ужгород, ул. Проектная, 4
| Механизм шарнира руки манипулятора | 1978 |
|
SU701793A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
