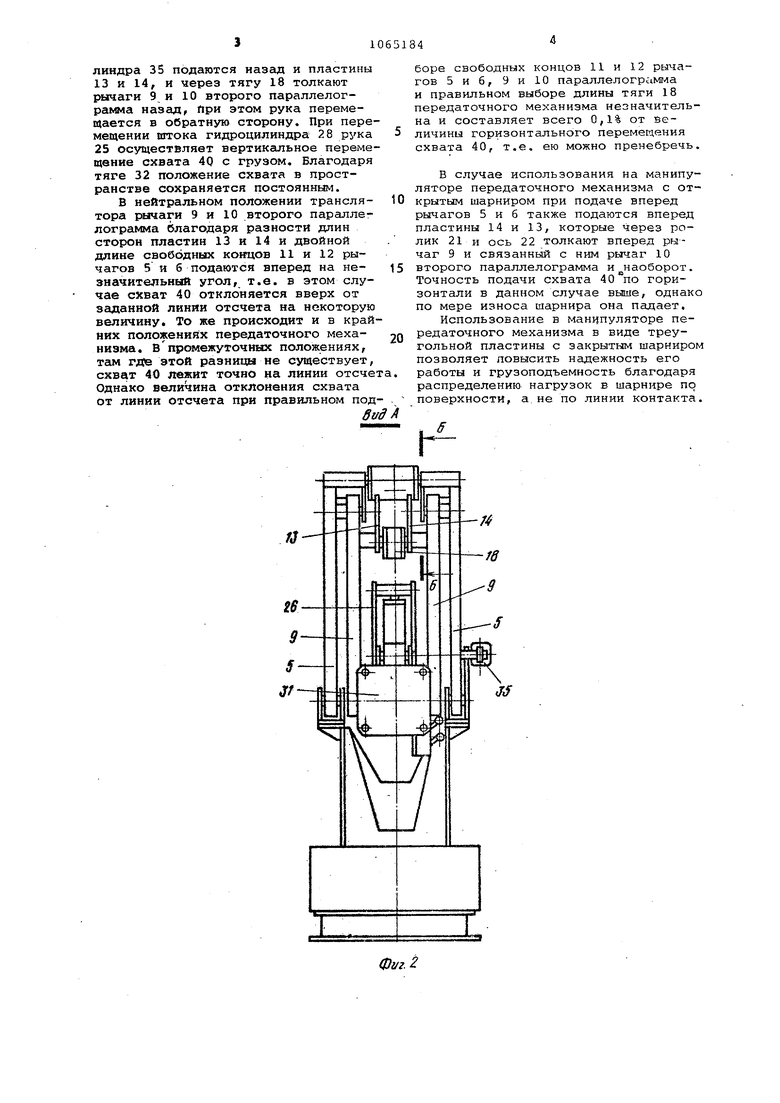
Изобретение относится к подъемно транспортному машиностроению, а име но к манипуляторам с ручным управле нием. Известен манипулятор, содержащий опорно-поворотное устройство с корпусом, на котором установлен транслятор в виде двух шарнирно соединен ных и кинематически связанных между собой передаточным механизмом парал лелограмме j, рычаги одного из которык шарнирно соединены с корпусом, а другого - с рукой схвата, параллелограммы связаны между собой зубчатыми секторами, а горизонтальное перемещение схвата происходит при одновременном раздвижении или сдвиге параллелограммов с переходом их через нейтральное положение il . Недостатком данного манипулятора является наличие зубчатых секторов в качестве передаточного устройства между параллелограммными механизмами транслятора, что усложняет конструкцию и снижает надежность манипулятора. Цель изобретения - повышение надежности работы манипулятора. Указанная цель достигается тем, что в манипуляторе, содержащем опор но-поворотное устройство с корпусом на котором установлены параллелогра мы, выполненные в виде двух шарнирно соединенных и кинематически связанных между собой передаточным механизмом рычагов, причем рычаги одного параллелограмма шарнирно соеди нены с корпусом, а рычаги другого с ручкой схвата, передаточный механизм выполнен в виде треугольных пластин, каждая из которых углами шарнирно соединена с рычагами одного параллелограмма, а третий угол каждой пластины связан дополнительно введенной тягой с одним из рычагов второго параллелограмма, соединенного с рукой, На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид Л на фиг. 1; на фиг. 3 - разрез Б-Б на фиг, 2; на фиг, 4 - передаточный механизм (вариант выполнения). Манипулятор содержит опорно-поворотное устройство 1 с корпусом 2, к которому посредством шарнирных опор 3 и 4 прикреплены рычаги 5 и 6 первого параллелограмма, К этим рычагам 5 и 6 посредством шарниров 7 и 8 прикреплены рычаги 9 и 10 второ го паргшлелограмма, равные по длине piJ4ary 5,. Рычаги 5 и б имеют свобод ные концы 11 и 12. Параллелограммы кинематически связаны между собой передаточным механизмом, выполненны в виде треугольных пластин 13 и 14, которые двумя углами крепятся иарни рами 15 и 16 к свободным концам 11 и 12 рычагов 5 и 6, а третий угол связан закрытым шарниром 17, тягой 18 и шарниром 19 с рычагом 10 (фиг,3) Расстояние между шарнирами 8 и 19 рычага 10 равняется длгне свободного конца 12, Длина малой стороны пластин 13 и 14 равняется среднему арифметическому расстоянию между шарнирами 16 и 19 в нейтральном положении и в любом крайнем положении транслятора. Возможен другой вариант соединения пластин 13 и 14 с параллелограммами (фиг, 4), В этом случае третий угол пластин соединен с рычагом 9 открытым шарниром 20, представляющим собой овальный паз, выполненный в пластинах, внутри которого размещен полйй ролик 21, насаженный на ось 22, жест ко закрепленную на рычаге 9. Расстояние между шарниром 7 и осью 22 равняется расстоянию между шарнирами 7 и 15, Длина овального паза равна разности расстояний между шарниром 15 и осью 22 в нейтральном и любом крайнем положениях передаточного механизма. Верхнее положение паза соответствует положению ролика 21 в любомкрайнем положении. К концам рычагов 9 и 10 второго параллелограмма через шарниры 23 и 24 крепятся рука 25 манипулятора и корпус 26 привода руки. Рука 25 манипулятора представляет собой двуплечий рычаг, на малое плечо которого через шарнир 27 действует гидроцилиндр 28, ,закрепленный на корпусе 26 через шарнир 29, К большому плечу руки через шарнир 30 крепится кронштейн 31, который посредством тяги 32 и шарниров 33 и 34 связан с корпусом 26, Длина тяги 32 равняется длине большого плеча руки 25. Перемещение руки 25. производится посредством гидроцилиндра 35, шток которого прикреплен к рычагу .через шар- НИР 36, а корпус цилиндра крепится к корпусу манипулятора через опору 4 и шарнир 37, Манипулятор имеет выносную станцию гидропривода 38, К кронштейну 31 руки манипулятора крепятся пульт 39 управления и схват 40, Манипулятор работает следующим образом. При выдвижении штока гидроцилиндра 35 рычаги 5 н 6 параллелограмма подаются вперед на заданный угол. Соответственно вперед подаются пластины 13 и 14 передаточного механизма, который через тягу 18 тянет рычаг 10 и связанный с ним рычаг 9 второго параллелограмма вперед на тот же заданный угол. Благодаря совместному движению рычагов рука 25 и корпус 26 подаются вперед по горизонтали. При втягивании штока гидроцилиндра 35 подаются назад и пластины 13 и 14, и через тягу 18 толкают рчлчаги 9 и 10 второго параллелогpaNQvia назад, При этом рука переметается в обратную сторону. При перемещении штока гидроцилиндра 28 рука 25 осуществляет вертикгшьное nepeiMeщение охвата 4Q с грузом. Благодаря тяге 32 положение схвата в пространстве сохраняется постоянным.
В нейтральном положении транслятора рмчаги 9 и 10 второго параллелограмма благодаря разности длин сторон пластин 13 и 14 и двойной длине свободных концов 11 и 12 рычагов 5 и б подаются вперед на незначительный угол, т.е. в этом случае схват 40 отклоняется вверх от Зс1данной линии отсчета на некоторую величину. То же происходит и в крайних положениях передаточного механизма. В промежуточных положениях, там где этой разницы не существует, схват 40 лежит точно на линии отсче Однако величина отклонения схвата от линии отсчета при правильном под/J
гв
боре свободных концов И и 12 рычагов 5 и 6, 9 и 10 параллелограмг.1а и правильном выборе длины тяги 18 передаточного механизма незначительна и составляет всего 0,1% от величины горизонтального перемещения схвата 40, т.е. ею можно пренебречь.
В случае использования на манипуляторе передаточного механизма с открытым шарниром при подаче вперед рычагов 5 и б также подаются вперед пластины 14 и 13, которые через ролик 21 и ось 22 толкают вперед рычаг 9 и связанный с ним рычаг 10 второго параллелограмма и наоборот. Точность подачи схвата горизонтали в данном случае выше, однако по мере износа шарнира она падает.
Использование в манипуляторе передаточного механизма в виде треугольной пластины с закрытым шарниром позволяет повысить надежность его работы и грузоподъемность благодаря распределению нагрузок в шарнире по поверхности, а не по линии контакта.
8 и
15
П
S-6
rs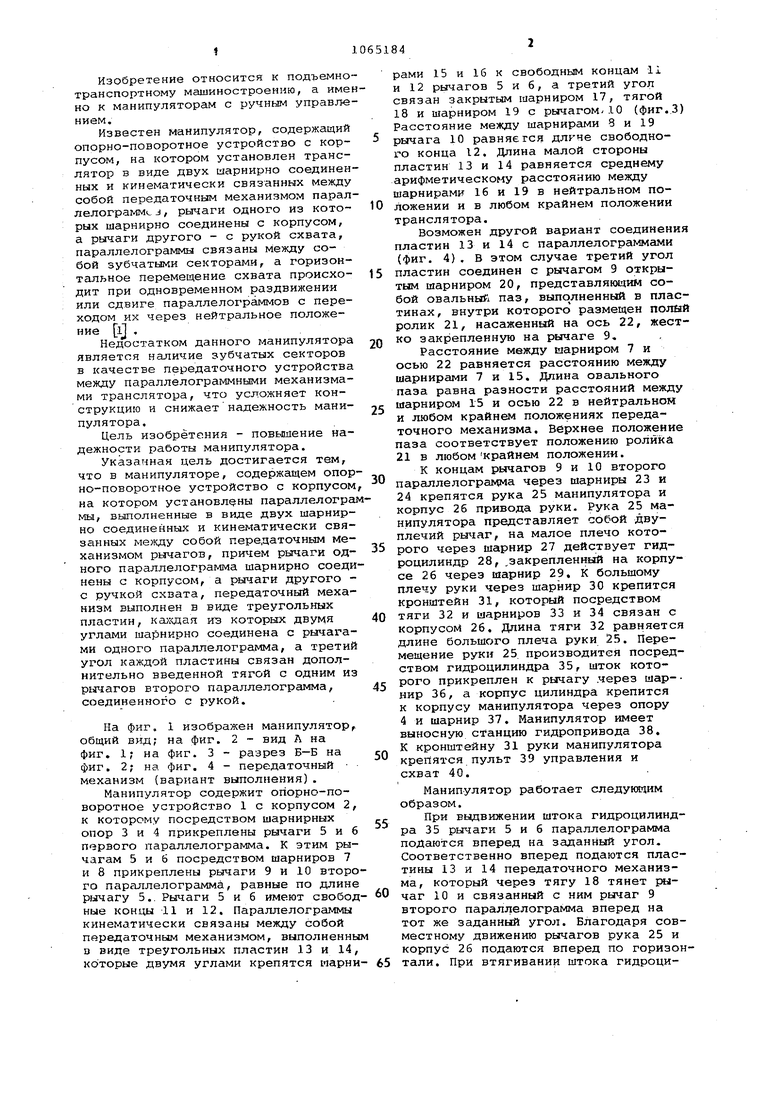
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1364467A1 |
| Кисть манипулятора | 1987 |
|
SU1421532A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1974 |
|
SU602366A1 |
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |
| Манипулятор для плоских стеклоизделий | 1987 |
|
SU1549743A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |

МАНИПУЛЯТОР,, содержащий опорно-поворотное устройство с кор- пусом, на котором установлены параллелограммы, выполненные в виде .двух шарнирно соединенных и кинематически связанных между собой передаточным механизмом, причем, рычаги одного параллелограмма шарнирно соединены с корпусом, а рычаги другого - с рукой, отличающийс я тем, что, с целью повышения надежности работы манипулятора, передаточный механизм содержит треугольные пластины, каждая из которых двумя углами шарнирно соединена с рычагами одного параллелограмма, а третий угол каждой пластины связан дополнитель-но введенной тягой с одним из рычагов второго параллелограмма, соединенного с рукой.
п. :
21
fff4 rs
фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1974 |
|
SU515635A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
