(54) МЕХАНИЗМ ШАРНИРА РУКИ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Мезанизм шарнира манипулятора | 1979 |
|
SU848356A2 |
| Механизм шарнира руки манипулятора | 1984 |
|
SU1214411A2 |
| Механизм шарнира руки манипулятора | 1978 |
|
SU701793A1 |
| Манипулятор | 1984 |
|
SU1273243A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| МУФТА РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ И РЕГУЛИРУЮЩАЯ СИСТЕМА ДЛЯ НЕЕ | 2002 |
|
RU2292494C2 |
| Шарнирный механизм манипулятора | 1985 |
|
SU1268412A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403144C2 |
| Манипулятор | 1990 |
|
SU1722807A1 |
1
Изобретение относится к робототехнике и может быть использовано в .промышленных роботах различного назначения, манипуляторы которых включают шарнирно-сочлененные звенья.
По основному авт.сз. № 701793 известен механизм гиарнира руки манипулятора, содержащий промежуточное звено, соединенное посредством крестовин с предыдущим и последующим звеньями руки и привода Tl.
Недостатком известного механизма является ограниченность суммарного угла отклонения исполнительного звена манипулятора,т.е. недостаточная маневренность.
Цель изобретения - повышение маневренности.
Цель достигается тем, что точка шарнирного крепления рычага с предыдущим звеном расположена выше точки пересечения осей крестовины, соединяющей промежуточное и предыдущее звенья.
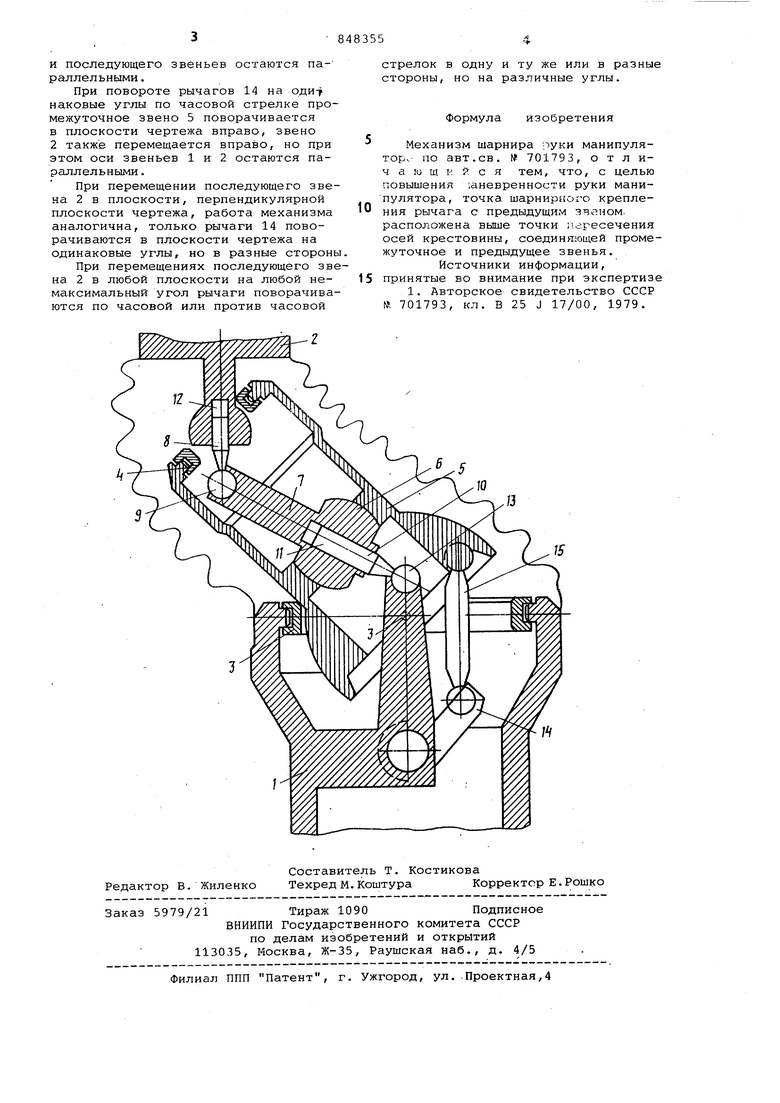
На чертеже показана конструкция механизма шарнира руки манипулятора.
Механизм шарнира содержит предыдущее звено 1, последующее звено 2 и соединенное с ними посредством крес.товин 3 и 4 промежут 6чное Звено 5.
На звене 5 закреплен сферическим шарниром 6 двуплечий рычаг 7. На концах рычага установлены оси: ось 8 - посредством сферического шарнира 9, а ось 10 - посредством поступательной пары 11. Ось 8 соединена поступательной парой 12 с последующим звеном 2. Ось 10 соединена шарниром
13с предьщущим звеном 1. Точка соеди10нения оси 10 и шарнира 13 размещена выше точки пересечения осей крестовя-ны 3, соединяющей звенья 1 и 5. Механизм шарнира приводится в движение приводами (не показаны) через рычаги
ts
14и тяги 15.
Устройство работает следукяцим
образом.
t
В исходном положении рычаги 14
20 зафиксированы. При повороте рычагов 14 в плоскости чертежа на равные углы против часовой стрелки промежуточное звено 5 тягами 15 поворачивается вокруг оси крестовины 3
25 на требуемый угол влево, одновременно рычаг 7 поворачивается вокруг оси сферического шарнира 6 и поворачивает через ось 8 звено 2 вокруг оси крестовины 4 в противоположную
30 сторону. При этом оси предыдущего
