1
Изобретение относится к области автоматизации производственных процессов методами числового программного управления и может быть использова но для управления перемещениями инструментов по контуру.
Известна контурная система числового программного управ.пения с шаговым приводом 1, содержащая считывающее устройство, устройство ввода, буферную память,многокоординатный интерполятор, блок круговой координаты, генератор задания кррости, блок управления приводом и пульт упрешления.
Из известных устройств для контурного числового программного управления наиболее близким техническим решением к изобретению является устройство для программного управления .приводом 2 , содержащее лентопротяя ный механизм, блок считывания и контроля программы, блок памяти, блок управления, интерполятор, шаговые двигатели, блоки управления шаговыми двигателями и сумматор.
Ведостатком известных устройств является то, что по координатам с меньшими приращениями шаговые двигатели находятся во включенном, срстоя.нии и тогда, когда отработка шагов не производится. Следствием этого является ухудшение энергетических ха рактеристик системы и снижение ее надежности из-за верациснальных потерь потребляемой энергии, которая расходуется на перегрев шаговых двига влей и их схем управления,-йаходящихся в статическом состоянии, i Целью изобретения является повышение надежности устройства.
Поставленная цель достигается тем, что в устройство для программного управления приводом, содержащее блок управления и ввода программы, выход которого подсоединен ко входу коммутатора, и усилители, подключены к шаговому двигателю, введены генератор стробирующих импульсов и последовательно соединенные триггер, элемент ИЛИ и блок элементов И, выходы которого подключены ко входам усилителей, а вторые входы - к выходам коммутатора Входы триггера соелянены с соответствующими выходами блока управления и ввода программы, а второй вход элемента ИЛИ - с ВЫХО.ЦОМ генератора
СТрОбИрУЮЩИХ ИМПУЛЬСОВ.
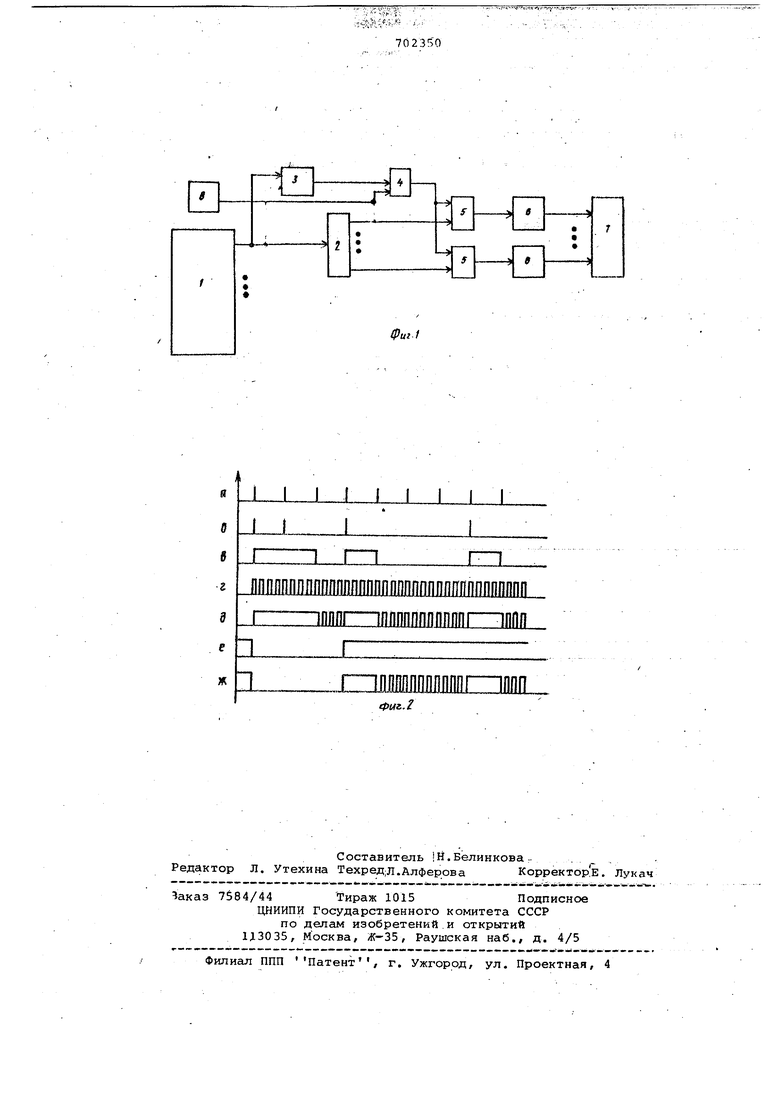
На фиг. 1 представлена структурная схема устройства.
УстрЬйство, содержит блок упра:вления и ввода программы 1, коммутатор 2, триггер 3, элемент ИЛИ 4, блок элементов И 5, усилители 6, шаговый двигатель 7 и генератор стробирую1цих импульсов 8.
На фиг. 2 показаны временные диаграммы работы устройства для одной обмотки шагового двигателя, где а импульсы генератора задающей частоты .интерполирования, входящего в состав. блока 1; б - импульсы интерполирования; в - сигналы на единичном выходе триггера 3; г - сигналы генератора 8; д - сигналы на выходе элемента ИЛИ 4 е - сигналы на выходе одной из фаз коммутатора 2j ж - сигналы на выходе блока элементов И 5.
Устройство работает следующим образом.
Из блока 1 на нулевой установочный вход триггера 3 поступают импульсные сигналы генератора задающей частоть1 интерполирования (фиг. 2,а), сбрасывая триггер 3 в нулевое состояние. Импульсы; интерполирования (фиг. 2,6) поступаютиз блока 1 на входы соответствуюдего данной координате канала. коммутатора 2 и единичные установо чные входы соответствующего триггера 3. При этом коммутатор 2 изменяет свое со стояние, а триггер 3 устана вл ива ется в единичное состояние (фиг. 2, в); через элемент ИЛИ 4 (фиг. 2, д) открывает элементы И блока 5, благодаря чему сигналы коммутаЬ тора 2 (фиг. 2,е) поступают через элементы И блока 5 (фиг. на усилителей Ь.При 11с:)ступлении слёдующего импуль са интерполирования через время, большее одного периода задающей частоты интерполирования, триггер 3, уста навливается в нулевое состояние очередным И1.тульсом генератора задающей частоты. При этом импульсы ь-енератора. 8 поступают на входы блока элементов; И 5, стробируя сигналы коммутатора 2; Частота стробирующих импульсов выбйраетсйнапорядок больше, чем задающая частота интерполирования. .. За счет стробирования усилителей 6 потребляемая мощЖсзсть снижается. Гак, при скважности этих импульсов, равнЪй двум, потребляемая мощность также снижается в два раза.
При поступления второго ймпульса
интерполирования через время, равное
одному периоду следования импульсов генератора задагацей частоты интерпо- . лирования, .триггер 3 остается в единичном состоя 1ии и через элемент ИЛИ 4 и блок элементов И 5 сохраняет разрешение на поступление сигналов коммутатора 2 на входы усилителей 6;
Таким образом, при отработке пере4 мейения коммутация обмоток шагового двигателя осуществляется импульсами длительности, равной периоду генератора задающей частоты интерполирования, а в статическом положении шагового двигателя до прихода очередного, импульса интерполирования питания erci обмотки осуществляется стробированНьоми сигналами высокой частоты гене- ; ратора 8, что обеспечивает удержание двигателей в заданном положении.
Предложенное устройство позволяет обеспечить экономичный режим питания шаговых двигателей и уменьшить перегрев оборудования, что повышает го надежность. Экономичность режима1 питания шаговых двигателей определяется количеством каналов управлений и величинами отрабатываемых приращений.
Формула изобретения
Устройство для программного управ- пения приводом, содержащее блок управления и ввода программы, выход кото- ; рого подсоединен ко входу коммутатора, и усилители, подключенные к шаговому двигателю, отл ич ающ еес я тем, что, с целью повышения надежности устройства, в него введены генера-; тор стробирующих импульсов и последовательно соединенные триггер, элемент ИЛИ- и блок элементов и, выходы которого подключены,ко входам усилителей, а вторые входы - к выходам коглмутатора, входы триггера соединены с соответствующими выходами блока управления и ввода программы, а второй вход элемента ИЛИ -с выходом генератора стробирукщйХ импульсов.
Источники йнформации, принятые ВО внимание при экспертизе
1.Сб. Способы подготовки программ и интерполятора для контурных систем числового управления станками. М., Машиностроение, 1970, с. 40.
2.Авторское свидетельство СССР
:f 327449, кл. G 05 В 19/04, 1972 (прЬТОТИП ;
i
Ж1С111Ш111Ш1Ш1ПППП ГДЕ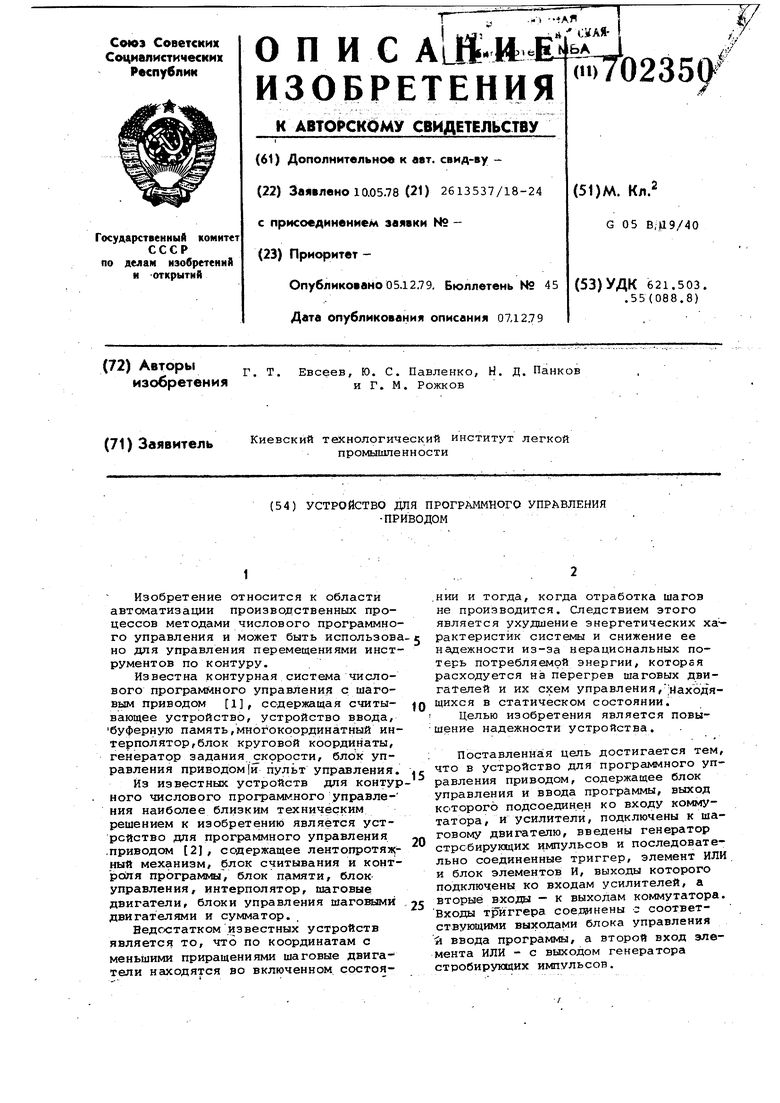
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Цифровой круговой интерполятор | 1985 |
|
SU1327064A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1615744A2 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Линейный интерполятор | 1976 |
|
SU651318A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1980 |
|
SU959036A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |