(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU919804A1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1986 |
|
SU1399111A1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| Сбалансированный манипулятор | 1988 |
|
SU1517251A1 |
I
Изобретение относится к машиностроению и может быть использовано в манипуляторах и промышленных работах.
Известен манипулятор, соаержащий основание и приводы вращатальйоРодействия для перемещения и ориентации кисти в вертикальной плоскости, установлен- , ные на основании f1.
Недостатком известного устройства является еложнЬсть консгруктивной схемы, обеспечивающей перемещение кисти в вертикальной плоскости.
Цель изобретения - упрощение конструкции манипулятора.
Этодостигается тем, что предлагаемый манипулятор снабжен двумя парами шарнирных.звеньев, причем tiepBEie ёвенья каждой пары жестко соединены с выходными валами приводов, перемещения кисти, вторые -шарнирно соединенымежду собой, а вал одного из этих приводов снабжен рычагом - противовесом.
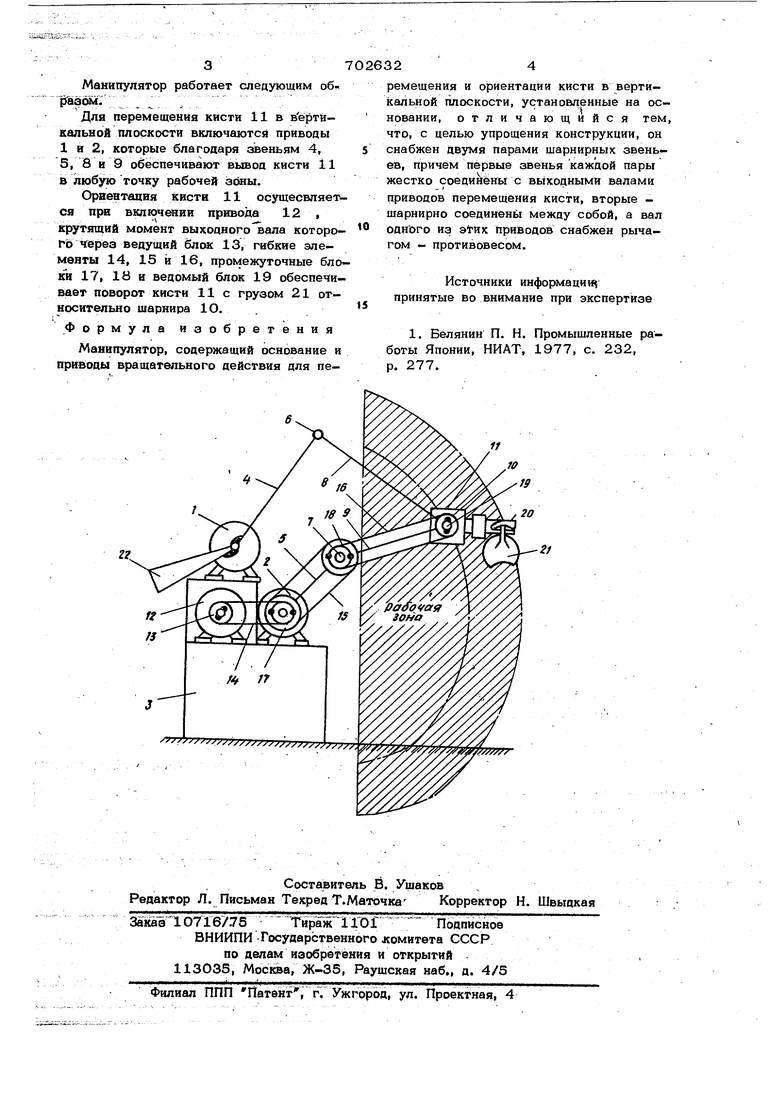
На чертеже изображена кинематическая схема манипулятора,
Манипулятор сйДбрнсит приводы 1 и 2 вращательного действия, установленные на основании 3, выходные валы которых жестко связаны со званьями 4 и 5. Концы звеньев 4 и 5 с помощью ниров 6 и 7 связаны со звеньями 8 я 9, соединенными меЖцу собой шарниром ip, на оси которого смонтирована кисть 11.
Для ориентации кисти в вертикальной Шосксзстй на оснЬваййи 3 установлен
o прнвоп 12 вращательного действия. На выходном валу привода 12 жестко закреплен ведущий блок 13, который благодаря гибким элементам 14, 15 и 16 через промеж Ьчн:ыё блоки 17 и 18,
S шарнирно установленные соответственно на оси вы5содноРЬ 1в&ла прй:боДа 2 и на шарнире 7, связан с ведомым блоком 19, жестко связанным с кистью 11, снабженной схватом 20 для подъема и ориентации груза 21. Для компенсации веса груза 21 выходной вал привода 1 жестко связан с рычагом - противовесом 22.
