(54) УСТЮЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ РАБОЧЕГО ОРГАНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи и воспроиз-ВЕдЕНия пРОгРАММ | 1978 |
|
SU807238A1 |
| Программное устройство для управления перемещением | 1973 |
|
SU490083A1 |
| Устройство управления многокоординатным механизмом | 1981 |
|
SU1001011A1 |
| Программное устройство для управления перемещением исполнительного механизма | 1976 |
|
SU675402A2 |
| Шаговая система программного управления многокоординатным манипулятором | 1977 |
|
SU644617A1 |
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| Устройство для решения обратных задач теории поля | 1984 |
|
SU1164748A1 |
| Устройство для накопления сейсмических сигналов | 1980 |
|
SU989503A1 |
| ГИДРАВЛИЧЕСКОЕ НАЖИМНОЕ УСТРОЙСТВО МНОГОВАЛКОВОЙ РАБОЧЕЙ КЛЕТИ ПОПЕРЕЧНОЙПРОКАТКИ | 1972 |
|
SU414017A1 |
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
Изобретение относится к области автоматики и может быть использовано при создании устройств программного управления в сварочном производстве для направления элерода по линии соединения свариваемых деталей с записью программы путем предварительного обхода траектории линии соединения.
Известны устройства для программного управления перемещением рабочего органа. Устройство 11, содержащее блок памяти, усилители записи и воспроизведения, привод продольной подачи рабочего органа и шаговый двигатель, не обеспечивает определение конца программы в режиме автоматической сварки.
. Наиболее близким техническим рещением к данному изобретению является устройство 2, содержащее блок управления, привод продольной подачи рабочего органа, связанный непосредственно с рабочим оргаиом и через последовательно соединенные сельсийдатчик и сельсин-приемник с блоком памяти первый выход коюрого через первый клич
соединен со входом первого усилителя воспроизведения, усилитель мощности, выход которого через второй ключ подключен к первому входу шагового двигателя, связанного через редуктор с рабочим органом, второй выход щагового двигателя через последовательно соединенные третий ключ, формирователь импульсов, первый усилитель загшси и четвертый ключ подключен к первому входу блока памяти, второй выход которого через последовательно соединенные пятый ключ и второй усилитель воспроизведения соединен с преобразователем частоты, выход генератора импульсов через последовательно соединенные второй усилитель записи и щестой ключ подключен ко второму входу блока памяти.
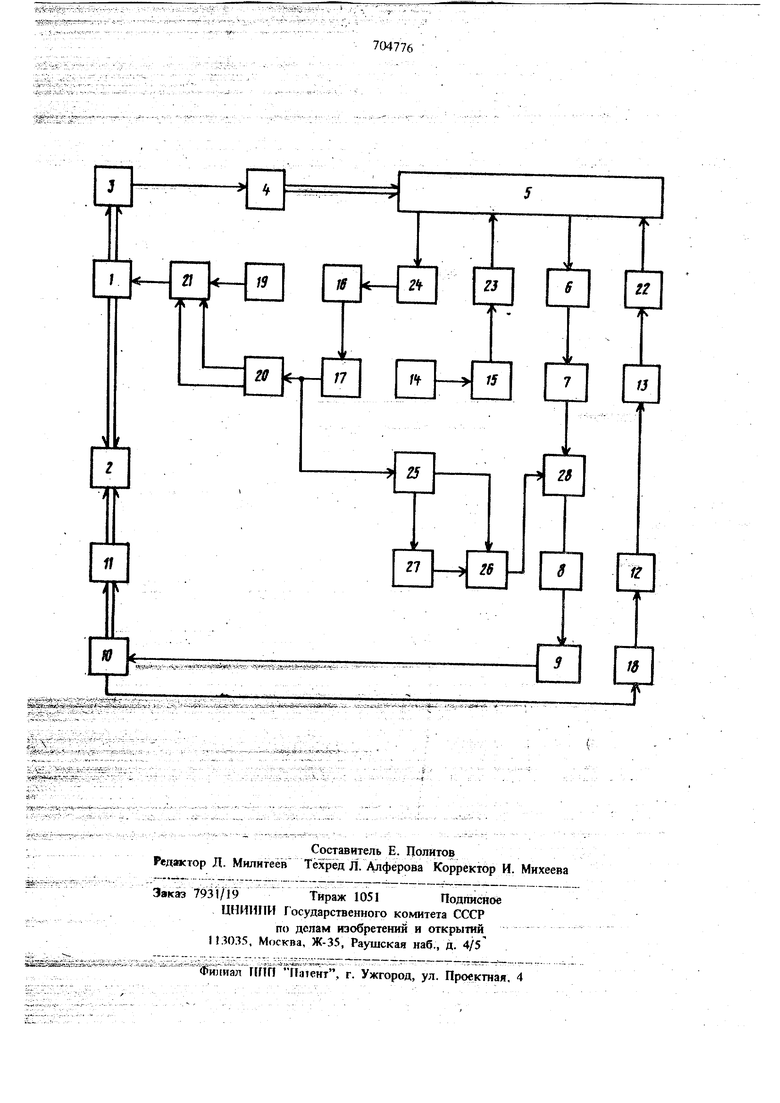
Недостатком известного устройства является то, что в нем не предусмотрена возможность автоматического реверса сварочного аппарата и поперечного смещения электрода При выполнении многослойной С1варки. Это сужает функциональные возможности устройства, в результате чего оператору необходимо перед выполнением сварки каждого последунЗщего слоя производить поперечное смешение электрода н включать сварочный аппарат. Целью изобретения является расширение функциональных возможностей устройства. Сущность изобретения заключается в том, что устройство содержит блок управления реверсом, коммутатор, мультивибратор и последовательно соединенные блок задания поперечного смещения рабочего органа, элемент И и элемент ИЛИ, второй вход которого соединен с выходом первого усилителя воспроизведения, а выход - со входом усилителя мощности, второй выход блока задания поперечного смещения рабочего органа через мультивибратор подключен ко второму входу элемента И, первый и второй выходы бло ка управления реверсом соединены соответст.венно с первым и вторым входами коммутатора, третий вход которого подключен к выходу блока управления, а выход - ко входу привода продольной подачи рабочего органа. На чертеже представлена функциональная схема устройства для программного управления перемещением рабочего органа. Устройство содержит привод 1 подачи рабочего органа рабочий орган 2, сельсин-датчик 3, сельсинприемник 4, блок 5 памяти, первый ключ 6, первый усилитель 7 воспроизведения, усили- , тель 8 мощности, второй ключ 9, щаговый двигатель 10, редуктор 11, формирователь 12 импульсов, первый усилитель 13 записи, генератор 14 импульсов, второй усилитель 15 записи, второй усилитель 16 воспроизведения, преобразователь 17 частоты, третий ключ 18, блок 19 управления, блок 20 управления реверсом, коммутатор 21, четвертый ключ 22, пятый ключ 23, шестой ключ 24, блок 25 задания поперечного смещения рабочего органа, элемент 26 И, мультивибратор 27, элемен 28 ИЛИ. Устройство работает следующим образом. При включении устройства в режим записи программы от блока 20 управления реверсом поступает команда на один из входов коммутатора 21 в зависимости от направлени движения рабочего органа 2. Коммутатор 21 включает нужное направление движения рабочего органа 2. В этом режиме при движении рабочего органа 2, осуществляемого от привода 1 поДачи, приводится в действие син фазный вал, состоящий из сельсин-датчика 3 и сельсин-приемника 4, в результате чего осу ществляется перемещение магнитной ленты бл ка 5 памяти. С помощью синфазного вала происходит синхронизация перемещения рабочего органа 2 с программой его поперечных перемещений. При наличии отклонения линии соединения от оси движения рабочего органа оператор с помощью рукоятки производит сппмещение рабочего органа 2 с линией соединения. Перемещение рабочего органа 2 через редуктор 11 преобразуется в поворот ротора шагового двигателя 10. Наличие зубцов на роторе двигателя приводит к изменению индуктивного сопротивления статорных обмоток двигателя, которые через третий ключ 18 вклю чены в соответствующую схему формирователя 12 импульсов. Изменение индуктивного сопротивления обмоток приводит к измене- нию амплитуды сигнала переменного тока, питающего обмотки шагового двигателя 10. Огибающая сигнала переменного тока, частота которой зависит от скорости вращения ротора шагового двигателя 10, выделяется с помощью детектора и преобразуется в прямоугольные импульсы. С выхода формирователя 12 импульсов прямоугольные импульсь поступают на вход первого усилителя 13 записи. После усиления эти прямоугольные импульсы через ключ 22 поступают в универсальную магнитную головку блока 5 памяти и записываются на магнитную ленту. Одновременно с записью программы перемещений импульсы генератора 14 импульсов поступают на второй усилитель 15 записи. После усиления эти импульсы через шестой ключ 24 поступают в универсальную магнитную головку блока 5 памяти и также записываются на магнитную ленту. После окончания записи программы перемещений в блоке 24 задания поперечного смещения рабочего органа фиксируются по времени, в зависимости от количества слоев сварки, необходимые величины поперечного перемещения рабочего органа 2 и их последовательность Затем устройство включается в режим воспроизведения программы для сварки первого слоя. Режим воспроизведения осуществляется при обратном движении сварочного аппарата. При этом также от блока 20 управления реверсом команда поступает на другой вход коммутатора 21, который подключает привод 1 подачи. Считываемый универсальный магнитной головкой сигнал программы перемещений через первый ключ 6 подается на первый усилитель 7 воспроиэведения, с выхода которого он через элемент 28 ИЛИ поступает на вход усилителя 8 мощности. С выхода усилителя 8 мощности импульсы программы через второй ключ 9 поступают на шаговый двигатель 10, который преобразует импульсы в угол -поворота ротора. Вращение ротора шагового двигателя через редуктор 11 преобразуется в поперечное перемещение рабочего органа 2,
чем обеспечивается его точное совмеше1ше с линией соеданения.
Одновременно с воспроизведением сигнала программы перемещений считываемый второй укиверсальной магнитной головкой сигцал постоянной частоты через пятый ключ 23 подается на второй усилитель 16 воспроизведения, с выхода которого он подается на вход преобразователя 17 частоты. На выходе преобразователя формируется постоянное напряжение, которое через блок 20 управления реверсом поддерживает в замкнутом состоянии контакты коммутатора 21 в зависимости от направления движения рабочего органа 2.
После отработки программы перемещений сигнал на выходе преобразователя 17 частоты , исчезает, коммутатор 21 отключает цепь блока 19 управления и рабочий орган 2 останавливается. Из перепада напряжения на выходе преобразователя 17 в блоке 20 управления реверсом формируется импульс, который з,адерживается на некоторое время, а затем переключает устройство на движение в обратном направлении для сварки очередного слоя.
Из зтого же перепада напряжения на выходе преобразователя 17 в блоке 25 задания поперечного смещения рабочего органа 2 также формируется импульс, который в этом же блоке 25 осуществляет выборку времени поперечного смещения рабочего органа 2, которое в виде прямоугольного импульса необходимой длительности поступает на первый вход элемента 26 И. Элемент 26 И открывается и пропускает на вход элемента 28 ИЛИ импульсы с мультивибратора 27, которые поступают на вход усилителя 8 мощности. В результате 2ТОГО рабочий орган 2 смещается на соответст, вующую величину.. После отработки этого смещения через время задержки срабатывает коммутатор 21 и производится сварка очередного слоя.
Нужное направление смещения электрода осуществляется по команде, поступаюп ей из блока 25 задания поперечного смещения рабо.чего органа 2 на мультивибратор 27.
Применение изобретения позволит i автоматизировать процесс многослойной сварки. Формулаизобретения
Устройство для программного управления перемещением рабочего органа, содержащее
привод продольной подачи рабочего органа, связанный непосредственно с рабочим органом и через последовательно соединенные сельсиндатчик и сельсин-приемник с блоком памяти, первый выход которого через первый ключ соединен со входом первого усилителя воспроизведения, усилитель мощности, выход ко торого через второй ключ подключен к первому входу щагового двигателя, связанного через редуктор с рабочим органом, второй выход шагового двигателя через последовательно соединенные третий ключ, формирователь импульсов, первый усилитель записи и четвертый ключ подключен к первому входу блока памяти, второй выход которого через последовательно соединенные пятый ключ и второй усилитель воспроизведения соединен с преобразователем частоты, выход генератора импульсов через последовательно соединенные второй усилитель записи и шестой ключ подключен ко второму входу блока памяти, отличающееся тем, что, с целью расщирения функциональных возможностей устройства, оно содержит блок управления реверсом. Коммутатор, мультивибратор и последовательно соединенные блок задания поперечиого смещения рабочего органа, элемент И и элемент ИЛИ, второй вход которого соединен с выходом первого усилителя воспроизведения, а выход - со входом усилителя мощности, второй выход блока задания поперечного смещения рабочего органа через мультивибратор подключен ко второму входу элемента И, первый и второй выходы блока управления реверсом соединены соответственно с Первым и вторым входами коммутатора, третий вход которого подключен к выходу блока управления, а выход - ко входу привода продольной подачи рабочего органа, при этом входы блока управления реверсом и блока задания поперечного смещения рабочего органа соединены с выходом преобразователя частоты.
Источники информации, принятые во внимание при экспертизе
N 490083,кл. G 05 В 19/40, 02.07.73.
19
21
i
6
гг
гз
2
Iff
/7
15
fr
ю
.v-i;i f-44:r-« -: a i4,--t.- .-.,i
гв
2У
г
ii
26
J Li.
J
