1
Изобретение относится к области автоматики и вычислительной техники и может быть использовано при создании импульсных систем управления манипулятором.
Известная шаговая система программного управления многокоординатным манипулятором , содержащая блок памяти, блока записи и воспроизведения, блок формирования команд, коммутатор и шаговый двигатель, имеет в блоке памяти две магнитные дорожки по каждой регулируемой координате, что ограничивает число регулируемых координат.
Наиболее близким к изобретению техническим решением является система , содержащая последовательно соединенные блок памяти, ключ и блок воспроизведения, последовательно соединенные коммутатор и шаговый двигатель, связанный через исполнительный орган с датчиком положения исполнительного органа, блок записи, выход которого через ключ подключен ко входу блока памяти, и формирователь исполнительных команд.
В этой системе по каждой координате используется только одна магнитная дорожка, что позволяет использовать систему в многокоординатных манипуляторах. Однако реализация этой системы на двоичных элементах при использовании информации в троичной системе счисления (+1.0-1) является весьма сложной.
Целью изобретения является упрощение системы.
Сущность изобретения заключается в том, что система содержит первый элемент
ИЛИ, первый элемент задержки, одновибратор, последовательно соединенные первый элемент И и триггер и последовательно соединенные второй элемент задер|Жки, третий элемент задержки, второй элемент
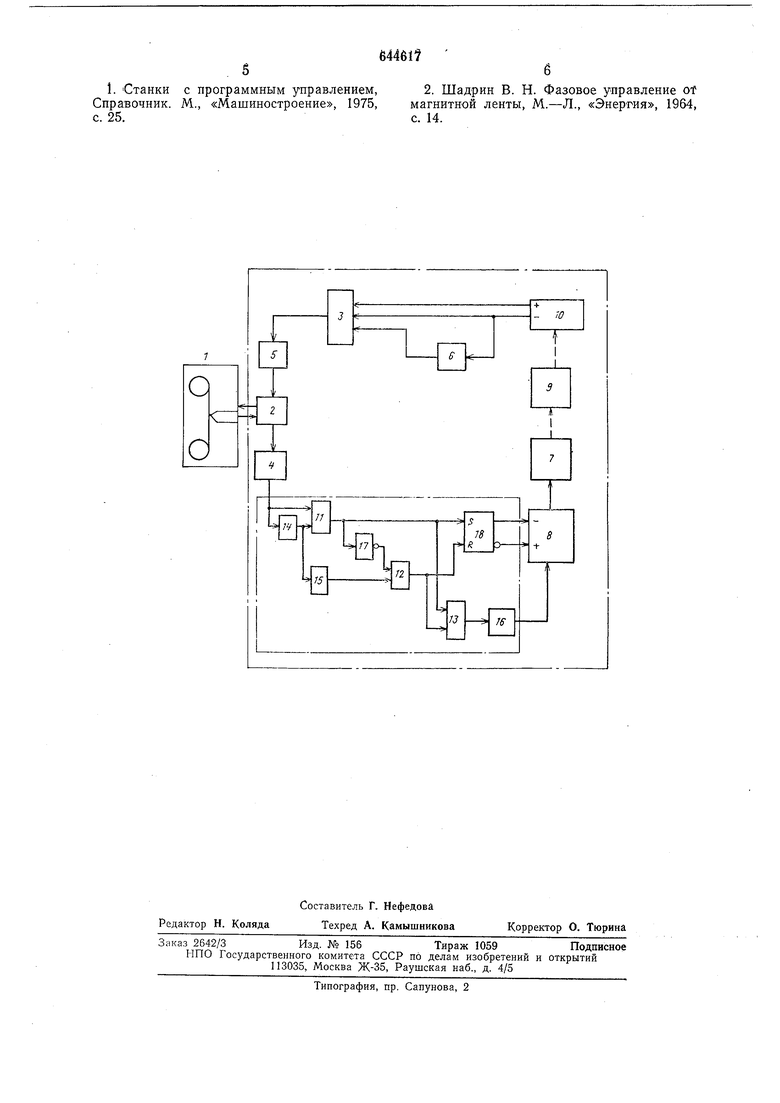
И, второй элемент ИЛИ и четвертый элемент задержки, выход которого подключен к первому входу коммутатора, второй и третий входы которого соединены соответственно с первым и вторым выходами триггера, -первый вход которого подключен ко второму входу второго элемента ИЛИ, а второй вход - к выходу второго элемента И, второй вход которого через одновибратор соединен с выходом первого элементаИ, первый вход которого подключен ко входу второго элемента задержки и выходу блока воспроизведения, а второй вход - к выходу второго элемента задержки, первый выход датчика положения исполнйтельного органа соединен с первым входом первого элемента ИЛИ, второй вход - непосредственно со вторым входом первого элемента ИЛИ и через первый элемент задержки с третьим входом первого элемента ИЛИ, выход которого подключен ко входу блока записи. На чертеже представлена функциональная схема предлагаемой системы. Схема содержит блок 1 памяти, ключ 2, первый элемент ИЛИ 3, блок 4 воспроизведения, блок 5 записи, первый элемент 6 задержки, шаговый двигатель 7, коммутатор 8, исполнительный орган 9, датчик 10 полол ения исполнительного органа, первый элемент И 11, второй элемент И 12, второй элемент ИЛИ 13, второй 14, третий 15 и четвертый 16 элементы задержки, одновибратор 17, триггер 18. Система работает следующим образом. Для записи программы устанавливают ключ 2 в положение «Запись и вручную производят необходимые перемеш;ения исполнительного органа 9, при этом с датчика 10 положения исполнительного органа имПульсы поступают через первый элемент ИЛИ 3 на блок 5 записи и программа записывается на магнитную ленту блока памяти 1. Импульсы обратного перемещения поступают на вход первого элемента ИЛИ 3непосредственно с датчика 10 и через первый элемент задержки 6, поэтому программа обратного перемещения записывается двойными смещенными на время задержки импульсами. В положении ключа 2 «Работа считанные с магнитной ленты блока 1 памяти одиночные и двойные импульсы через блок 4воспроизведения поступают на элементы формирования управляющих команд. При реализации программы обратного перемещения сдвоенные импульсы выделяются первым элементом И -и вторым элементом 14 задержки при наличии сдвоенных импульсов на выходе первого элемента И 11 формируются одиночные импульсы, которые следуют с соответствующими программе интервалами и поступают через второй элемент ИЛИ 13, на четвертый элемент 16 задержки. Эти же импульсы поступают на вход триггера 18, устанавливают триггер 18 в единичное положение. Управляемый триггером 18 коммутатор 8 переключает обмотки шагового двигателя 7 в положение обратного перемещения. После этого задержанные импульсы с четвертого элемента 16 задержки поступают через вход коммутатора 8 на шаговый двигатель 7, который перемещает исполнительный орган 9 в соответствии с программой. Импульсы с выхода первого элемента И 11 запускают одновибратор 17, формирующий сигналы, закрывающие второй элемент И 12. При поступлении с блока воспроизведения 4 одиночных импульсов (прямое перемещение) через элементы задержки 14 и 15 на второй элемент И 12, второй вход которого, подключенный к одновибратору 17, открыт, на выходе второго элемента И 12 появляются импульсы, которые переключают триггер 18 в положение логического нуля, коммутатор 8 переключает обмотки шагового двигателя 7 на прямое перемещение. Эти же сигналы через второй элемент ИЛИ 13 и элемент 16 задержки проходят на коммутатор 8 и отрабатываются шаговым двигателем 7. Описанная система обеспечивает работу одной регулируемой координаты и при работе с многокоординатным манипулятором должна быть увеличена соответственно по количеству регулируемых координат. Применение изобретения позволит упростить щаговую систему программного управления многокоординатным манипулятором при реализации ее на двоичных элементах. Формула изобретения Шаговая система программного управления многокоординатным манипулятором, содержащая последовательно соединенные блок памяти, ключ и блок воспроизведения, последовательно соединенные коммутатор и шаговый двигатель, связанный через исполнительный орган с датчиком положения исполнительного органа, и блок записи, выход которого через ключ соединен со входом блока памяти, отл ич а ющаясятем, что, с целью упрощения системы, она содержит первый элемент ИЛИ, первый элемент задержки, одновибратор, последовательно соединенные первый элемент И и триггер и последовательно соединенные второй элемент задержки, третий элемент задержки, второй элемент И, второй элемент ИЛИ и четвертый элемент задержки, выход которого подключен к первому вхоДУ коммутатора, второй и третий вход которого соединены соответственно с первым и вторым выходами триггера, первый вход которого подключен ко второму входу второго элемента ИЛИ, а второй вход - к выходу второго элемента И, второй вход которого через одиовибратор соединен с выходом нервого элемента И, первый вход которого подключен ко входу второго элемента задержки и выходу блока воспроизведения, а второй вход - к выходу второго элемента задержки, первый выход датчика положения исполнительного органа соединен с первым входом первого элемента ИЛИ, второй вход - непосредственно со вторым входом первого элемента ИЛИ и через первый элемент задержки с третьим входом первого элемента ИЛИ, выход которого подключен ко входу блока записи. Источники информации, принятые во внимание при экспертизе 1. Станки Справочник. с. 25. 5б с программным управлением,2. Шадрин В. Н. Фазовое управление of М., «Машиностроение, 1975, магнитной ленты, М.-Л., «Энергия, 1964, 64461 с. 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программного управления перемещением рабочего органа | 1977 |
|
SU704776A1 |
| Устройство управления многокоординатным механизмом | 1981 |
|
SU1001011A1 |
| Устройство для управления многозвенным манипулятором | 1985 |
|
SU1257613A1 |
| Устройство для программногоупРАВлЕНия МНОгОКООРдиНАТНыММАНипуляТОРОМ | 1977 |
|
SU819794A1 |
| Контурная система программного управления многокоординатным манипулятором | 1977 |
|
SU740491A1 |
| Устройство для управления манипулятором | 1980 |
|
SU903807A1 |
| Устройство для программного управления | 1978 |
|
SU734617A1 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
