(54) УСТРОЙСТВО ДЛЯ ЗАПИСИ ПРОГРАММЫ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
| Устройство для автоматического копирования линии сварного соединения | 1983 |
|
SU1133060A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программного управления | 1986 |
|
SU1416938A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
| Устройство для позиционирования и контроля размерного износа режущего инструмента в станках с ЧПУ | 1982 |
|
SU1055627A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Ассоциативная однородная обучаемая среда для распознавания объектов | 1983 |
|
SU1149287A1 |
| Тренажер оператора радиоэлектронной аппаратуры | 1989 |
|
SU1658193A1 |
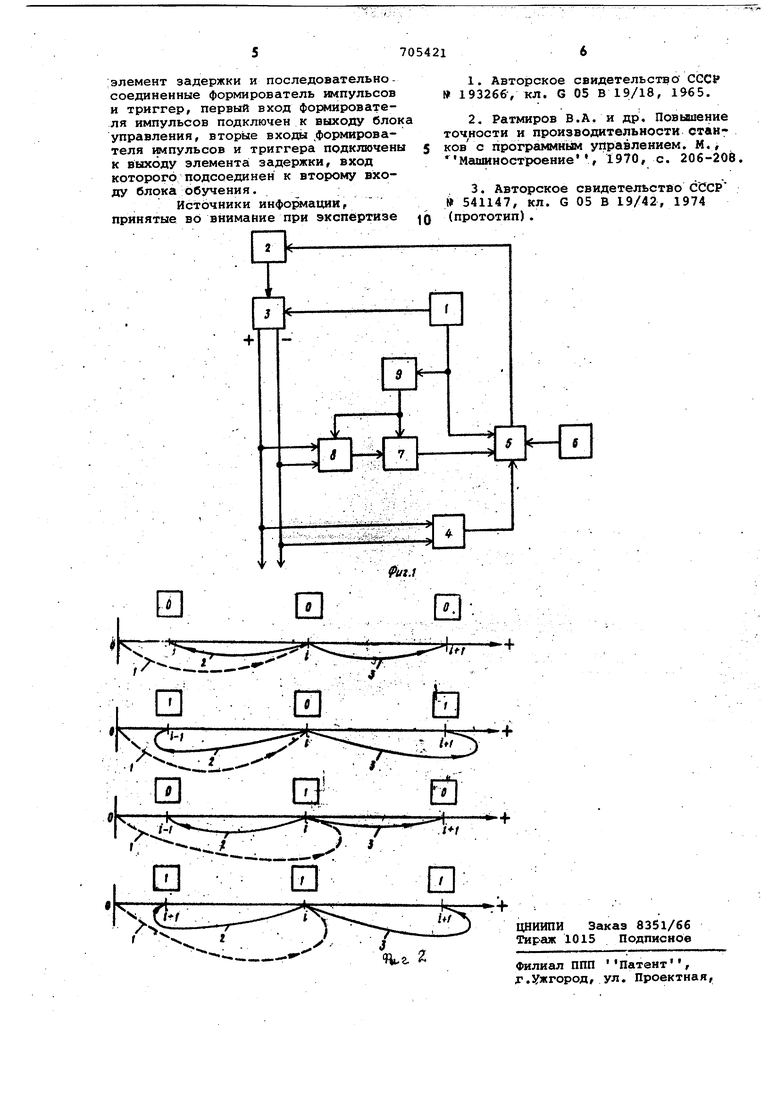
Изобретение относится к области автоматизации в машиностроении и может быть использовано в системах управления роботами для записи программы . В станках с программным управлением широко применяются устройства компенсации погрешности,.вызываемой ИЗНОСОМ инструмента. Известно устройство для компенса ции износа инструмента в системах программного управления фрезерньлми ;станками, содержащее счетчики-наколители, устройство сравнения, долговременное запоминающее устройство, устройство распределения выходных импульсов И сумматор 1. В указанном устройстве осуществляется сложение с командными импульсами дополнительной последовательности импульсов, формируемой по pe3y.nbTaT измерения износа инструмента. Недостатком известного устройства ЯВЛЯЮТСЯ недостаточные технологические ВОЗМОЖНОСТИ, поскольку оно не позволяет осуществлять компенсацию знакопеременной погрешности, во никающей за счет люфта в механизмах робота в процессе позиционирования рабочего органа при записи программы по методу обучения от точки к точке, который преимущественно используется в прбмьрЛёнЙых роботах. Известно также устройство, содержащее отдельную систему воспроизведения коррекцииj записанной на дополнительной дорожке магнитной ленты 2. Данному устройству присущ тот же недостаток, и, кроме того, оно отличается СЛОЖНОСТЬЮ, ПОСКОЛЬКУ содержит дополнительный канал управления двиraTejieM коррекции. Наиболее близким к изобретению является устройство для программного управления, содержащее устройство обучения, подключенное к устройству управления, а также логическое запоминающее устройство, соединенное с устройством управления 3. Устройство обеспечивает запи.сь в запоминающее устройство величин приращений в интервалах между точками позициониро.вания рабочего органа.. Недостатком устройства является невысокая точность записи, поскольку при позиционировании рабочего органа в циклах записи не учитывается знакепёрём нная погрешность, возникающая из-за люфта в механизмах робота. Целью изобретения является повышение точности-устройства. Поставленная цель достигается тем, ЧТО в устройство введены элемен задержки и последовательно соеди нёйные фоТрйЙЕ Ьёатель импульсов и три fep, первый вход,формирователя им- рульсов подключен к выходу блока упVaвлeния, вторые входы формироватеЬя йМйульсов и триггера подключены «выходу элемента задержки, вход которого подсоединен к второму входу блока: обучения. .. На фиг.. 1 изображена блок-схема устройства для записи программы упpaJSjfeHHH промешшенным роботЬм;на фиг. 2 изображены траектории перемещения рабочего органа в -ю точку и воз1можные случаи его последующего перемещения в (i + 1) -ю или в (i-I) точки. , . устройство содержит блок 1 обучен и эаноминающий блок 2, которые подключены ,к блоку 3 управления. Выходы блока 3 управления через реверсивный Усчетчйк 4 соединены с сумматором 5, к которому подключены,регистр 6 памя и блок 1 обучения. Выход сумматора связан с запоминающим блоком 2. Триг гер 7 подключен через формирователь 8 импульсов к выходу блока 3 управле нйя, а его выход связан с сумматором 16ыхрды сброс триггера 7 и формйройателя 8 импульсов через элемент 9 задержки соединен с блоком 1 обучения. Устройство Для записи программы.. работает следующим образом. в процессе обучения робота при воздействии оператора через блок 1 обучения на блок 3 управления с вы .хода; последнего поступают импульсы на координат робота. Эти импульсы поступают также на входы реверсивного счетчика 4 и триггера 7. Смысл работыустройства для записи программы сводитсяк тому, чтопо око чайии процесса позиционирования в каждой точке в -запоминающем блоке 2 с выхода сумматора 5 записываются либо только импульсы, накопленные в реверсивном счетчике .4, либо к ним добавляется дополнительное постояниоё число импульсов,храняющееся в регистре 6 памяти и соответствующее средней величине люфта в Диапазо перемещений по данной оси координат. Триггер 7 работает таким , что обавлением импульсов из регистра 6 памяти к импульсам реверсивного счетчика 4 осуществляётся, только в тех точках, направление последнего перемещения в которых при позйцйонировании не совпадает с направлением перемещения в интервале между данной и предыдущей точками. На фиг. 2 цифрами 1 и О над точ нами позиционирования рабочего органа обозначено состояние триггера 7 по окончании цикла позиционирования перед подачей команды на занесение результата перемещения в запоминающий блок 2. Триггер 7 устанавливается вместе с формирователем 8 импульсов ;в нулевое состояние .по окончании каждого цикла позиционирования по сиг:налу записи с блока 1 обучения, пос;Тупающему через элемент 9 задержки.. ;РН изменяет свое состояние только при изменении направления перемещения по данной координате, такой режим рабоФы обеспечивается формирователем 8 импульсов. Запись результата суммирования в запоминающий блок 2 по окончании цикла позиционирования в очередной точке осуществляется по сиг- , налу от блока 1 обучения. По этому сигналу результат перемещения рабочего органа, накопленный в реверсивном счетчике 4, передается в сумматор 5,.где в зависимости от наличия сигнал на выходе триггера 7 к этому результату может добавляться или не добавляться содержимое регистра б памяти. / : . .;... .:.- .-- : . Таким образом, в процессе обучения робота после позиционирования в каждой очередной точке осуществляется запись в запоминающий блок 2,:поступающей в сумматор 5 из реверсивного счетчика 4 информации о перемещении между точками с учетом/величины люфта по каждой коор;цйнатё. За счет это о при воспроизведении записанной программы обеспечивается .более высокая точность перемещения рабочего органа, поскольку на его положении не будет сказываться знакопеременная погрешности, врзникающая при позиционировании из-за ,наличия люфта в механизмах робота, Технико-экономическая эффективность выразится прежде всего в повьлиении качества сварных соединений за счет повышения точности записи и воспроизведения программы. Формула изобретения Устройство для записи программы управления промышленным роботом, со держащее регистр памяти, блок обучения и последовательно соединенные запоминающий блбкг,блок управления, реверсивный счетчик и сумматор, выход которого подключен к входу запоминающего блока, первый и второй выходьГ блока обучения подсоединены к вторым входам блока управления и сумматора соответственно, третий вход сумматора подсоединен к выходу регистра памяти, отличающеес я тем, что, с целью повышения точности устройства, в него введены
;элемент задержки и последовательносоединенные формирователь импульсов и триггер, первый вход формирователя импульсов подключен к выходу блок управления, вторые входы .формирователя импульсов и триггера подключены к выходу элемента задержки, вход которого подсоединен к второму входу блока обучения.
Источники информации, принятые во внимание при экспертизе
