(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ
1
Изобретение относится к робототехнике и может быть использовано в системах управления промышленным роботом, в частности, при записи программы.
Известно устройство для управления промышленным роботом, содержащее счетчики, блок сравнения, блок памяти, сумматор и блок управления I.
Устройство не позволяет осуществлять компенсацию знакопеременной погрешности, возникгиощей из-за люфта в механизмах робота.
ч
Наиболее близким к предлагаемому является устройство, содержащее датчик положения и последовательно соединенные блок обучения, элемент задержки, формирователь импульса, триггер, сумматор, блок памяти и блок управления, выходы которого подключены к вторым входам формирователя импульса и входс1м привода и первого реверсивного счетчика, выходом соединенного с вторым входом сумматора, третий вход которого подключен к первому выходу блока обучения, вторым входом соединенного с вторым входом блока управления, причем выход элемента задержки подключен к второму входу триггера 2. РОБОТОМ
Недостатком устройства является невысокая точность записи программы, так как компенсация люфта в исполнительном механизме робота осуществляется с помощью постоянного импульсов, хранящегося в р егистре памяти. Это число импульсов соответствует средней величине люфта в диапазоне перемещений по каждой из
10 осей координат, а не фактической величине люфта, которая непостоянна в диапазоне перемещений по данной оси координат, и изменяется со временем по мере износа исполнительного 15 механизма.
Цель изобретения - повышение точности устройства.
Указанная цель достигается тем, что устройство содержит дополнительно
20 коммутатор, последовательно соединенные первый ключ и двоичный счетчик, а также последовательно соединенные элемент ИЛИ, второй ключ и второй реверсивный счетчик, второй вход
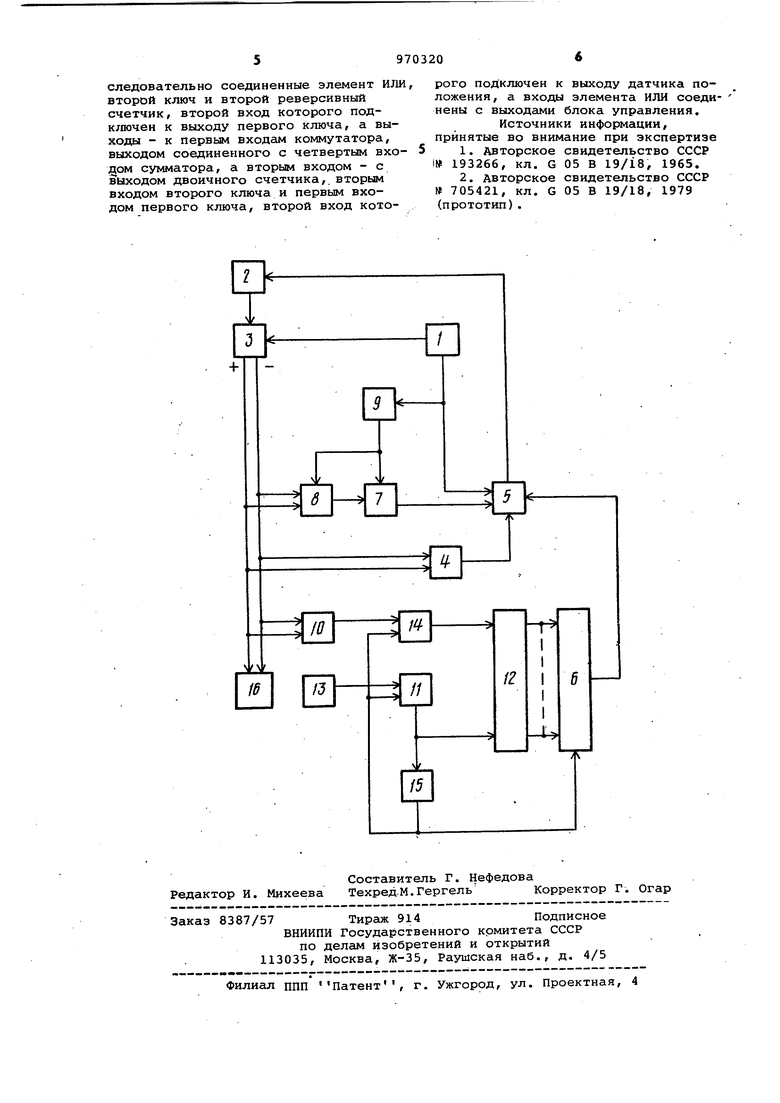
25 которого подключен к выходу первого ключа, а выходы - к первым входам коммутатора, выходом соединенного с четвертым входом сумматора, а вторым входом - с выходом двоичного 30 счетчика, вторым входом второго клю-, ча и первым входом первого ключа, второй вход которого подключен к вы ходу датчика положения, а входы элемента ИЛИсоединены с выходами блока управления. На чертеже представлена функциональная схема устройства для управ ления промышленным роботом. I Устройство содержит блок 1 обучения, блок 2 памяти, блок 3 управления, первый реверсивный счетчик 4 сумматор 5, коммутатор 6, триггер 7 формирователь 8 импульса,.элемент 9 задержки, элемент ИЛИ 10, первый ключ 11, второй реверсивный счетчик 12, датчик 13 положения, второй ключ 14, двоичный счетчик 15, привод 16. Устройство работает следующим об разом. В процессе обучения робота при воздействии оператора через блок 1 обучения на блок 3 управления с цыхода последнего поступают импульсы на привод 16. Эти импульсы поступаю также на входы первогореверсивного счетчика 4 и триггера 7. Сущность работы устройства заключается в том что по окончании процесса позиционирования в каждой точке в блоке 2 памяти с выхода сумматора 5 записываются либо только импульсы, накопленные в первом реверсивном счетчике 4 либо к ним добавляется дополнительное число импульсов из второго реверсивного счетчика 12, соответствующее фактической величине люфта данной оси координат в данной точке и в данное время. Триггер 7 работает таким образом, что добавление импульсов из второго реверсивного счет чика 12 осуществляется только в тех точках, направление последнего перемещения в которых при позиционировании не совпадает с направлением перемещения в интервале между данной и предыдущей точками. Триггер 7 устанавливается вместе с формирователем 8 импульса в нулевое состояние по окончании каждого цикла позициони рования по сигналу записи с блока 1 обучения, поступающему через элемент 9 задержки. Он изменяет свое состояние только при изменении направления перемещения по данной координате Такой режим работы обеспечивает формирователь 8 импульса. Запись резуль тата суммирования в блок 2 по окончании цикла позиционирования в оче редной точке осуществляется по сигналу от блока 1 обучения. По этому сигналу результат перемещения рабочего органа, накопленный в первом реверсивном счетчике 4, передается в сумматор 5, где в зависимости от наличия сигнала на выходе триггера 7 к атому результату может добавляться или не добавляться содержимое второго реверсивного.счетчика 12. Соответствие числа импульсов, поступающих от второго реверсивного счетчика 12 в сумматор 5, фактической величине люфта обеспечивается тем, что импульсы компенсации люфта через элемент ИЛИ 10 и второй ключ 14 накапливаются во втором реверсивном счетчике 12 до тех пор, пока при позиционировании в данной точке не будет выбран люфт в механической передаче и на второй (вычиталощий) вход реверсивного счетчика 12 не начнут поступать импульсы с датчика 13 положения через первый ключ 11. Те же импульсы датчика 13 положения затем поступают в двоичный счетчик 15, который своими выходами с момента поступления первого импульса запирает первый и второй ключи 11 и 14 и открывает коммутатор 6, разрешающий выдачу с второго реверсивного счетчика 12 накопленных импульсов. Это число соответствует фактической величине люфта данной оси координат в данной точке и в данное время. Разрядность двоичного:счетчика 15 выбирается из условия максимально возможной величины люфта. Таким образом, в процессе обучения робота после позиционирования в каждой очередной точке осуществляется запись в блок 2 информации о перемещении междуточками с учетом фактической, величины люфта по каждой координате во всем диапазоне перемещения. Благодаря этому при воспроизведении записанной программы обеспечивается более высокая точность перемещения рабочего органа, поскольку на его положении не сказывается переменная величина люфта. Применение изобретения позволяет повысить точность устройства. формула изобретения Устройство для управления промышленным роботом, содержащее датчик положения и пос;1едоватедьно соединенные блок обучения, элемент задержки, формирователь импульса, триггер, сумматор, блок памяти и блок управления, выходы которого подключены к вторым входам формирователя импульса и входам привода и первого реверсивного счетчика, выходом соединенного с вторым входом сумматора, третий вход которого подключен к первому выходу блока обучения, вторым входом соединенного с вторым входом блока управления, причем выход .элемента задержки подключен к второму входу триггера, отличающееся тем, что, с целью повышения точности, оно содержит коммутатор, последовательно соединенные первый ,ключ и двоичный счетчик, а также по
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи программы управления промышленным роботом | 1977 |
|
SU705421A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для автоматического копирования линии сварного соединения | 1985 |
|
SU1318356A1 |
| Устройство для программного управления | 1986 |
|
SU1416938A1 |
| Устройство для автоматического копирования линии сварного соединения | 1983 |
|
SU1133060A1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Тренажер сварщика | 1984 |
|
SU1217151A1 |
| Устройство для программного управления промышленным роботом | 1980 |
|
SU894675A1 |
| Устройство для считывания графической информации | 1986 |
|
SU1481813A1 |
