Изобретение относится к устройстиам управления печатной машины.
Целью изобретения является повьшение эффективности управления.
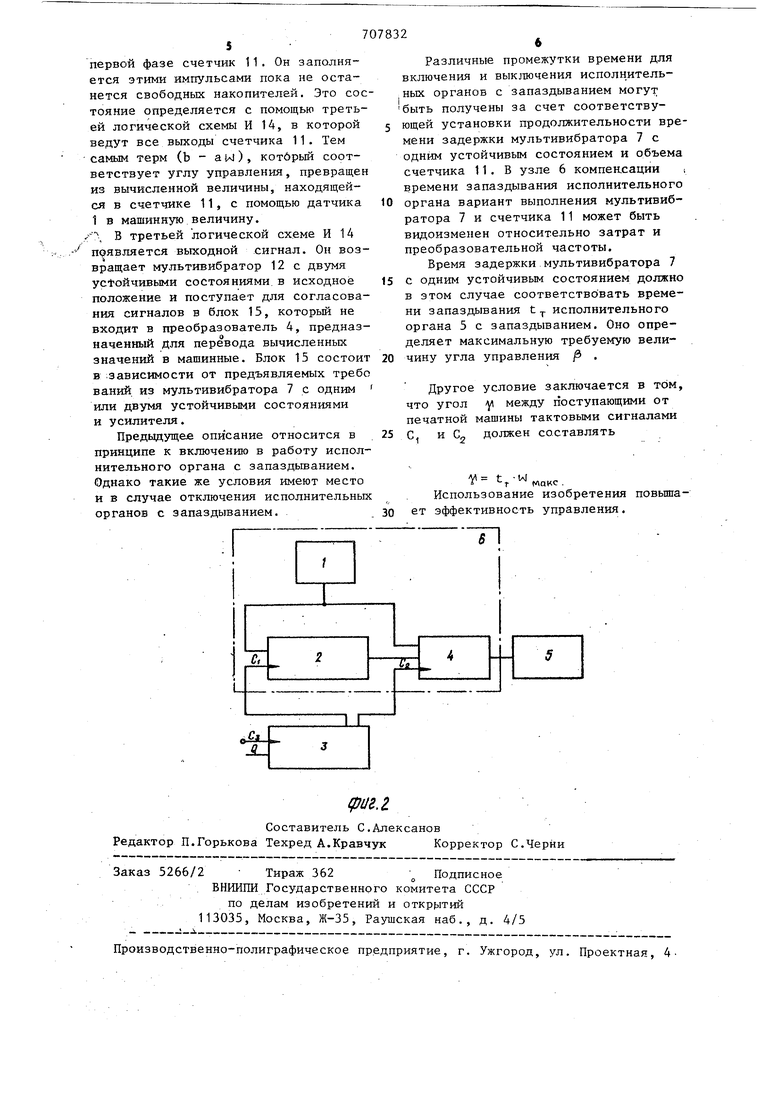
На фиг. 1 приведена принципиальная 5 схема системы управления исполнительным органом; на фиг. 2 блок-схема системы управления для компенсаций времени запаздьшания исполнительных органов.
Устройство содержит датчик 1, арифметический блок 2, тактирующий блок 3, преобразователь 4 информации, исполнительный орган 5, узел 6 компенсации времени запаздывания исполнительного органа, мультивибратор 7 с одним устойчивьм состоянием, первую логическую, схему И 8, обрабатывающую узел 9, логическую ИЛИ 10, счетчик 11j мультивибратор 12 с двумя устой- 20 чивыми состояниями,вторую логическук .схему И 13, третью логическую схему И 14 и согласующий блок.15.
Сигнал управления, поступающий в исполнительный орган, должен выдер живаться для компенсации времени запаздывания в зависимости от угловой скорости печатной машины. Угол, соответствующий задержке сигнала управления, называется углом направле- 30 Ния. Угол управления для более высоких угловых скоростей имеет меньшую величину, чем для низких угловых скоростей. Зависимость угла управления )8 от угловой скорости и пе- 35 чатной машины имеет следующий вид:
. . - а W + Ь, где а - постоянней, зависящая от
конструктивных параметров 40 исполнительных органов;
b - счетная величина.
В систему управления для компенсации времен запаздывания.исполнительных органов (см. фиг. 2) входит приводимый в действие тактовым импульсом с тактирующий блок 3, содержащий относящийся к управлению печатной машиной сигнал Q, например исполнительный сигнал для начала пе- 50 чатания.
Между блоком 3ч исполнительным органом 5 с запаздыванием включен узел 6 компенсации времени запаздывания исполнительного чоргана. Он сое- 55 тоит из арифметического блока 2, приводимого в действие тактовым импульсом С 1 блока 3 и включенного последовательно с ним преобразователя 4, предназначенного для перевода -вычисления величин в машинные величины, который приводится в действие тактовым импульсом С блока 3.
Датчик 1, предназначенньй для выдачи инкрементов угла поворота печатной машины, является частью узла 6 компенсации време,ни запаздывания исполнительного органа и соединен как с преобразователем 4, предназначенным для перевода вычисленных величин в машинные величины, так и с арифметическим блоком 2. Тактирующий блок 3 содержит принятый с тактовым импульсом Gj исполнительный сигнал Q для приведения в действие исполнительного органа, без учета имеющейся в данный момент угловой скорости
Эту задачу выполняет узел 6 компенсации времени запаздьшания исполнительного органа.
С помощью тактового импульса с блока 3 приводится в действие арифметический блок 2 для вычисления угла управления в соответствии с приведенным выше соотношением. Необходимая для производства вычислений угловая скорость печатной машины представляется через датчик 1.
По окончании процесса вычисления полученное вычисленное значение преобразуется с поступающим из блока 3 тактовым сигналом С „ с помощью преобразователя 4, предназначенного для перевода вычисленных величин в машинные величины, посредством выходных величин датчика 1 в машинное значение. В соответствии с его величиной приводится в действие исполнительньй орган 5 с запаздьшанием. При этом узел 6 компенсации времени запаздывания исполнительного органа 5 включен после блока 3. Узел 6 компенсации времени запаздьшания исполнительного органа состоит из следующих блоков: арифметического блока 2, преобразователя 4, предназначенного для перевода вычисленных величин в машинные величины, датчика 1 для выдачи угловых инкрементов печатной машины и устройства для согласования сигналов в блоке 15. Обрабатьшающий узел 9, в который входит логическая схема ИЛИ 10 и включенный последовательно с ней счетчик, в зависимости от положения первой логической схе;Мы И 8 или второй логической схемы И 13 придается или арифметическому блоку 2 или преобразователю 4, предназначенному для перевода вычисленных величин в машинные величины. Арифметический блок 2 связывается посредством тактовых импульсов Ci, которые поступают в мультивибра тор 7с одним устойчивьи состоянием управляется первая логическая схема И 8, второй вход которой соединен с датчиком 1. Выход первой логической схемы И 8 подается через логичес кую схему ИЛИ 10 на счетчик 11. Преобразователь 4, предназначенный для перевода, вычисленных величин в машинные величины, связан посредством тактовых импульсов С, которые поступают в мультивибратор 12 с двумя устойчивыми состояниями с тактиру ющим блоком 3. С выхода мультивибратора 12 с двумя устойчивыми состоя ниями, управляется Вторая логическая схема И 13, второй вход которой соединен с датчиком 1. Выход второй логической схемы И 13 подается через логическую схему ИЛИ 10 в счетчик 1 В преобразователь 4, предназначен ный для перевода вычисленных величин в Машинные величины, входит далее третья логическая схема И 14, входа которой соединены с выходами счетчика 1 1 с целью слежения за его показа ниями, и согласующий блок 15, который соединен с выходом третьей логической схемы И 14. Блок 15 принимает на себя ввод в действие исполнительного органа 5 с Запаздьшанием. Возврат в исходное положение муль тивибратора 12 с двумя устойчивыми состояниями происходит с помощью третьей логической схемы И 14. Тактирующий блок 3 принимает сигнал Q относящийся к устройству управ ления машиной, например исполнительный сигнал для начала печатания, который обрабатывается с поступающим о печатной машины тактовым импульсом Cj. Для компенсации времени запаздывания исполнительных органов после тактирующего блока 3 включен узел 6 компенсации времени запаздывания исполнительного органа. Процесс управления узлом 6 компенсации времени запаздывания исполнительного органа состоит из трех протекающих последовательно фаз: -вычисления угла управления в -накопления угла управления а , -выдачи угла управления д . С помощью этих трех фаз ниже рассматривается процесс управления. Уравнейие для угла управления А рассматривается при этом как дискретизируемое. Вычисление угла управления. Эта фаза начинается с поступления тактового сигнала С и обрабатывается в арифметическом блока 2. Смежный с тактовым сигналом С. сигнал блока 3 приводит в действие мультивибратор 7 с одним устойчивым состоянием, открьгоает первую логическую схему И 8, второй вход которой соединен с датчиком 1 для вьщачи инкрементов угла поворота печатной машины. Импульсы инкрементов угла поворота попадают в течение времени задержки мультивибратора с одним устойчивым состоянием 7 в обрабатывающий узел 9. Он образуется включенным после мультивибратора 7 логической схемой ИЛИ 10 и счетчиком 11. Накопление угла управления. Эта фаза отрабатывается в теченя времени задержки мультивибратора 7 с одним устойчивым состоянием в относящемся к арифметическому блоку 2 обрабатывающем узле 9. Показание счетчика 11, набежавшее в течение времени счета угла управления /3 j т.е. в течение времени задержки мультивибратора 7, характериз.ует терм (а W) приведенного выше равенства ля управления а . Если объем счетчика составляет b бит, то оставшийся свободным объем его составляет терм (Ь - аИ) равенства для угла упавленияВьщача угла управления р . Эта фаза начинается с поступления тактового сигнала С и отрабатывается преобразователе 4, предназначенном ля перевода вычисленных величин в ашинные величины. Смежный с тактоым сигналом Сл сигнал тактирующего лока 3 приводит в действие мультигибратрр 12 с двумя устойчивыми сосояниями. Последний подает через втоую логическую схему И 13 поступащие от датчика 1 импульсы угловых нкрементов в обрабатывающий узел 9. Импульсы поступают с выхода втоой логической схемы И 13 через схеу ИЛИ 10 и частично заполненный в
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления исполнительным органом в печатной машине | 1978 |
|
SU1359157A1 |
| Устройство для управления печатной машиной | 1977 |
|
SU925679A1 |
| Система управления печатными машинами с синхронным тактированием и запуском | 1980 |
|
SU1097514A1 |
| Цифровая следящая система | 1979 |
|
SU924663A1 |
| Устройство для программного регулирования | 1981 |
|
SU1016772A1 |
| Система управления исполнительными органами в печатных машинах | 1978 |
|
SU891486A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Устройство для управления процессом изготовления бетонных и железобетонных изделий | 1987 |
|
SU1516364A2 |
| Управляющая логическая машина | 1983 |
|
SU1119022A1 |
| Адаптивная система управления | 1988 |
|
SU1615675A1 |
СИСТЕМА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ В ПЕЧАТНОЙ МАШИНЕ, содержащая тактирующий блок, датчик, согласующий блок, выход которого соединен с входом исполнительного органа 'и схему управления, входы которой соединены с выходами тактирующего блока и датчика, отличающаяся тем, что, с целью повышения эффективности управления, схема управления имеет мультивибраторы, логические схемы И, ИЛИ и счетчик, при этом выходы тактирующего блока сое- • динены с входами первого и второго мультивибраторов, выходы которых соединены с первыми входами двух логических схем И, вторые входы которых связаны с выходом датчика, а выходы через логическую схему ИЛИ соединены с входом счетчика, выход которого че-^ рез третью логическую схему И соединен с дополнительным входом второго мультивибратора и входом согласующего блока.(Лс:I I^00 00to^fff./
| Патент США № 3818827, кл | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
