1
Изобретение относится к машиностроеншо и может быть использовано для автоматического переноса подвесок или барабанов с деталями по заданной программе на линии гальванических покрытий.
Известен автооператор, например, для линии гальванопокрытий, содержащий стационарный привод, траверсу для переноса изделий, закрепленную на вертикальных цепях, цепь с системой датчиков управления вертикальным перемещением траверсы и цепь с системой датчиков управления горизонтальным перемещением автооператора.
Для фиксированных остановок автооператора при продольном его перемещении используются датчики, которые устанавливаются около каждой позиции автоматической линии, а конечные выключатели или датчики, ограничивающие подъем или опркание траверсы для переноса деталей, устанавливаются на самом автооператоре. Автооператор передвигается вдоль автоматической линии и несет на себе электроприборы, поэтому он связан с электросетью гибким шлейфом.
Целью изобретения является упрощение конструкции автоматической линии для гальванических покрытий. . Для этого системы датчиков управлеНИН перемещением траверсы и автооператора кинематически связаны со стационарным приводом, а система датчиков управления перемещением автооператора выполнена в виде кинематически связанных дисков, на одном из которых по периферии установлены датчики с шагами, пропорциональными позициям останова автооператора на линии, а на другом диске укреплен элемент, управля1адий включением и выключением датчиков.
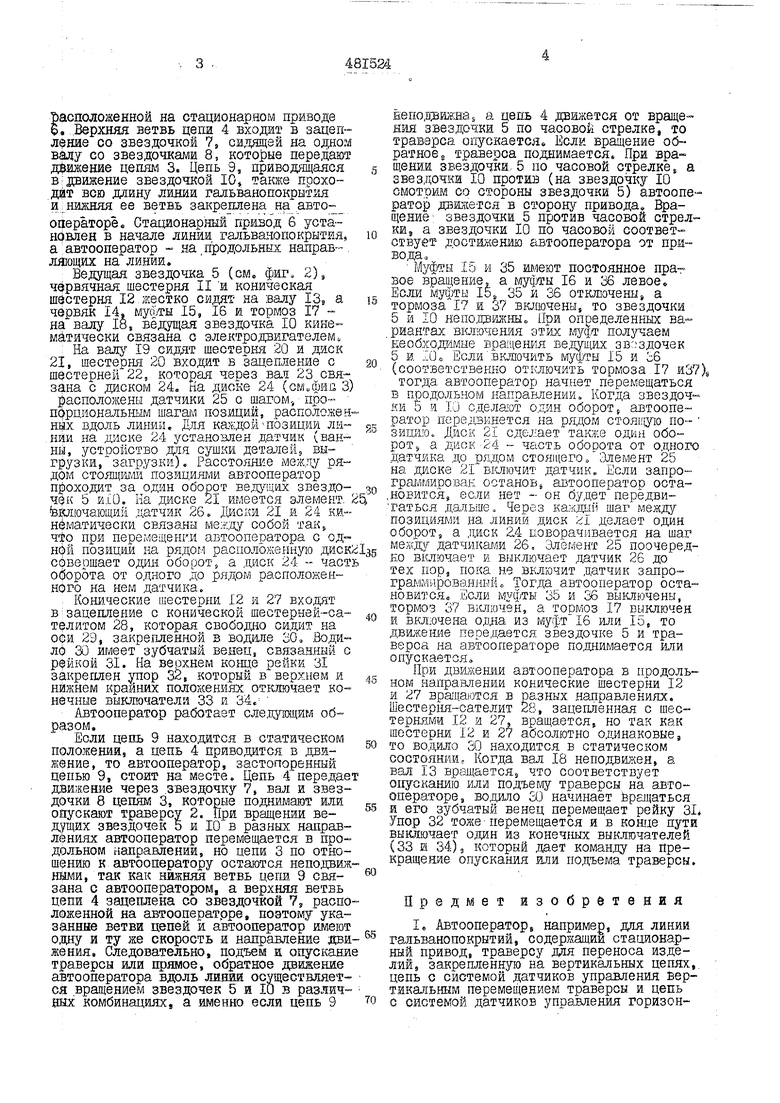
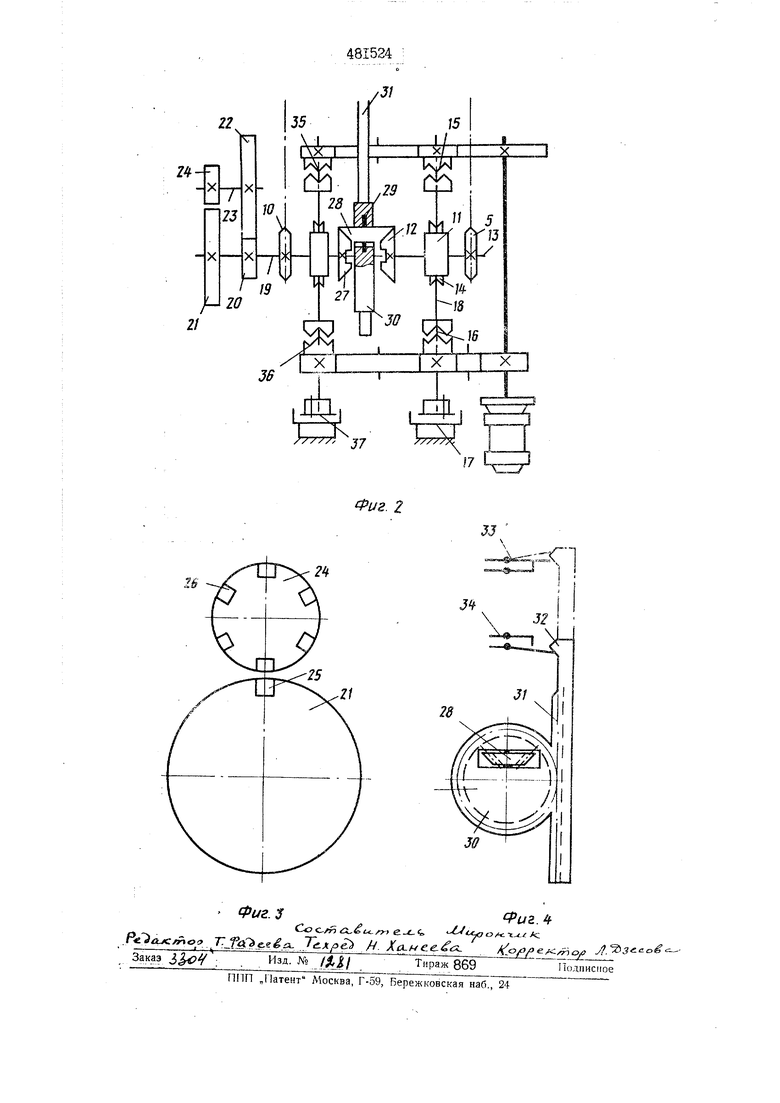
На фиг. I изобраа ена подвижная часть автоопёратора в аксонометрии; на фиг.2- стационарный привод, кинематическая схема; на фиг. 3 - дана схема расположения датчиков останова продольного перемещения автооператора; на фиг. 4 - схема расположения конечных выключателей, ограничивающих подъем или опускание траверсы автооператора.
Автооператор содержит траверсу I, снабженную захватами 2 для удержания штанги с подвескалш или барабана (на подаески навешиваются или в барабан засыпаются детали для гальванического покрытия). Траверса I закреплена на вертикальных цепях 3, при помощи которых она или поднимается, или опускается. На всю дайну линии гальванопокрытий натянута бесконечная цепь 4, приво-i дящая в движение ведущей звездочкой 5, расположенной на стационарном поиводе 6, ..Верхняя ветвь цеша 4 входиг в зацепление со звездочкой 7, сидящей на одном валу со звездочками 8, которые передают движение цепям 3. Цепь 9, приводящаяся выдвижение звездочкой 10, также проходит вою длину линии гальванопокрытия и-НИЖНЯЯ ее ветвь закреггаена на авто-оаераторё. Стационарный гфивод 6 устан0влен в начале линии гальванопокрытия, а автооператор - на продольных направ-. ляющих на линии. Ведущая звездочка 5 (см, фиг. 2), червячная щестерня II и коническая шестерня 12.жестко сидят на валу I3s а червяк 14, мублы 15, 16 и тормоз 17 на валу 18, ведущая звездочка 10 кинемйтически связана с электродвигателем : На валу 19 сиддт шестерня 20 и дйск 21, шестерью 20 входет в зацепление с шестерней 22, которая через ван 23 связана с диском 24. На диске 24 (смешил 3 расположены датчики 25 с шагом, пропорциональным шагам позиции, расположе.н НЫХ вдоль линии. Для Ка.ЖДО.Й позиции ЛИ НИИ на диске 24 установлен датчик (ванны, устройство для сушки деталей, выгрузки, загрузки). Расстояние между рядом стоящШуШ позициями автооператор проходи;т за один оборот звездочек 5 и10, Ка диске 21 имеется элемент. (включающий датчик 26 Лдски 21 и 24 кинематически связаны меж;ду собой так что при перемещенгИ автооператора с однфй позиции на рядом расположенную др1СК совершает один оборот а диск 24 - част оборота от одного до рядом расположенного на нем датчика. Кони.ческие шестерни 12 и 27 входят вiзацепление с конической шеотерней-сателитом 28, которая свободно сидит на офи 29, закрепленной в водале 30 Водило 30 имеет зубчатый венеЦ| связанный о рейкой 31. На верхнем конце рейки 31 закреплен упор 32, который в верхнем и нижнем крайних положениях отключает конечные выключатели 33 и 34. Автооператор работает сле,цущшл образом. Если цепь 9 находится в статическом положении, а цепь 4 приводится в движение, то автооператор, застопоренный цепью 9, стоит на месте. Цепь 4 передае движение через звездочку 7, вал и звездочки 8 цепям 3, которые поднш яают или опускают траверсу 2. При вращении ведущих звездочек 5 и 10 в разных нанравлениях автооператор перемещается в продольном направлении, но цепи 3 по отношению к автооператору остаются неподвиж шдаи, так как нижняя ветвь цепи. 9 связана с автооператором, а верхняя ветвь цепи 4 зацеплена со звездочкой 1 распо ложенной на автооператрре, поэтому указанные ветви цепей и автооператор имеют одну и ту же скорость и направление дви жения. Следовательно, подъем и опускани траверсы или прямое, обратное движение автооператора вдоль линии осуществляется вращением звездочек 5 и 10 в различяых комбинациях, а именно если цепь 9 Ёеподашг;на5 а цепь 4 движется от вращения звездочки 5 по часовой стрелке, то траверса ощгскается Если вращение обратное траверса поднимается При враш.ении звездочки.. 5 по часовой стрелке а звездочки 10 против (на звездочку 10 смотрим со стороны звездочки 5) автооператор движется в CTopOHj привода. Вращение; звездочки 5 против часовой стрелкИэ а звездочки 10 по часовой соответствует достижению автооператора от приводаМуфаы 1.5 и 35 имеют постоянное правое вращение, а муцзты 16 и 36 левое. Если муфты IBs 35 и 36 отключеныs а тормоза 17 и 37 вк шчены, то звездочки 5 и 10 неподвйжнЫо При определенных вариантах вюпочения этих щку получаем необходимые вра ценкя ведущих зв;;здочек 5 и 10о Есливключить муфты 15 и 36 (соответственно ОТЮЕЮЧИТЬ тормоза 17 и37Х тогда авгооператор начнет перемещаться в продольном напоавлении. Когда звездочки Ь и ;0 сделэлот о.дин оборот автооператор передвинется на рядом стояиопо позишю. Диск 21 сделает таклсе один оборот s а диск 24 - часть оборота от одного датчика до рядом стоящего/Элемент 25 на диске 21 включит датчик, .11оли запрогрШЛмировак останов s автооператор остановится если нет - он будет передвиаться дадыие Через шаг между позициягли на линии диск ;-dI делает один обо.роТэ а даек 2.4 Еоворачивается на шаг между датчикш ш 26. Элемент 25 поочередно включает и. выключает датчик 26 до тех пор, пока не включит датчик запрогрш.1мировэ.нинйо Тогда автооператор остановит ся. Если муфты 35 и 36 выключены, тормоз 37 включен, а тормоз 17 выключен и включена одаа из муфт 16 или 15, то AB0;if.eH.Me передается звездочке 5 и траверса на автооператоре подншлается или опускается При двшхеЕии автооператора в продольном направлении конические шестерни 12 и 27 вращаются в разных нацравлениях. Шестер1ш-сателит 28, зацепленная с шестернями .12 и 27, вращается, но так как шестерни 12 и 27 абсолютно одинаковыеj то водало 30 находится в статическом состоянии. Когда вал 18 неподвижен, а вал 13 вращается что соответствует опусканию .ИЛИ подъему траверсы на автооператоре водило 30 начинает йрацаться и его зубчатый венец перемещает рейку 31. Упор 32 тожеперемещается и в коаце пути выключает один из конеч{шх выключателей (33 и 34). который дает команду на Прекращение опускания или подъема траверсы. Предмет изобретения I, Автооператорб например, для линии гальванопокрытий, содержащий стационарный привод, траверсу для переноса издеЛИЙ9 закрепленную на вертикальных цепях,, цепь с системой датчиков управления вертикальным перемещением траверсы и цепь с системой датчиков управления горизонтальным перемещением автооператора, Ътличающийоя тем,что, с целью упрощения конструкции лиши, оиотемы датчиков управления перемещением траверсы и автооператора киненяатически связаш со стационарным приводом,
2. Автооператор по пЛ, о т л и ч а ю щ и и с ,что система датчиков управлением перемещением автооператора выполнена в виде кинематически связанных дисков, на одном из которых по периферии установлены.датчики с шагами, пропо зщональшми позициям останова автооператора н ртинии, а на другом диске 2:креплен элемент, управляющий включением и шключением датчиков.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДАЧИ МАТЕРИАЛОВ | 1991 |
|
RU2042597C1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Автооператор | 1987 |
|
SU1574694A1 |
| СПОСОБ ОТМЕРА ДЛИН СОРТИМЕНТОВ ПРИ РАСКРЯЖЕВКЕ ХЛЫСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2005591C1 |
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| Установка для сборки резинотехнических изделий | 1980 |
|
SU971666A1 |
| Автооператор для автоматической линии термообработки | 1976 |
|
SU748113A1 |
| Загрузочное устройство | 1987 |
|
SU1509222A1 |
| Автомат для изготовления плетеной металлической сетки | 1971 |
|
SU444593A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
Фиг. /
