tl/jbOiSs
Изооретекие OTHOCSTTCR к оборудов; - i т i i i MI i . HH O с одноадресным управлением;, прей- jip i т - т i т ni ьпщественно к управлению автооперато-.
рами полуавтоматмческ (5х линий галъ а- i i т ,i i и i I l
НОПОКрЫТИЙ.11 f т
Цель изобретения - повыление ;л- i|) i г дежности устройства.h f i
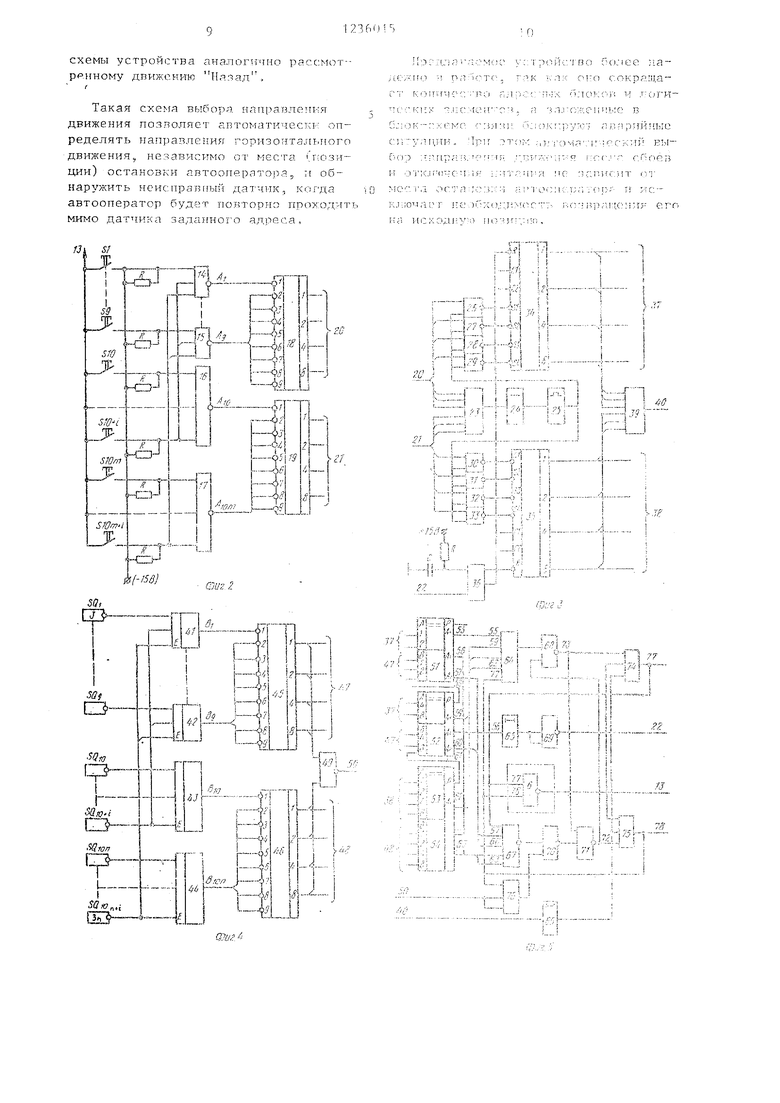
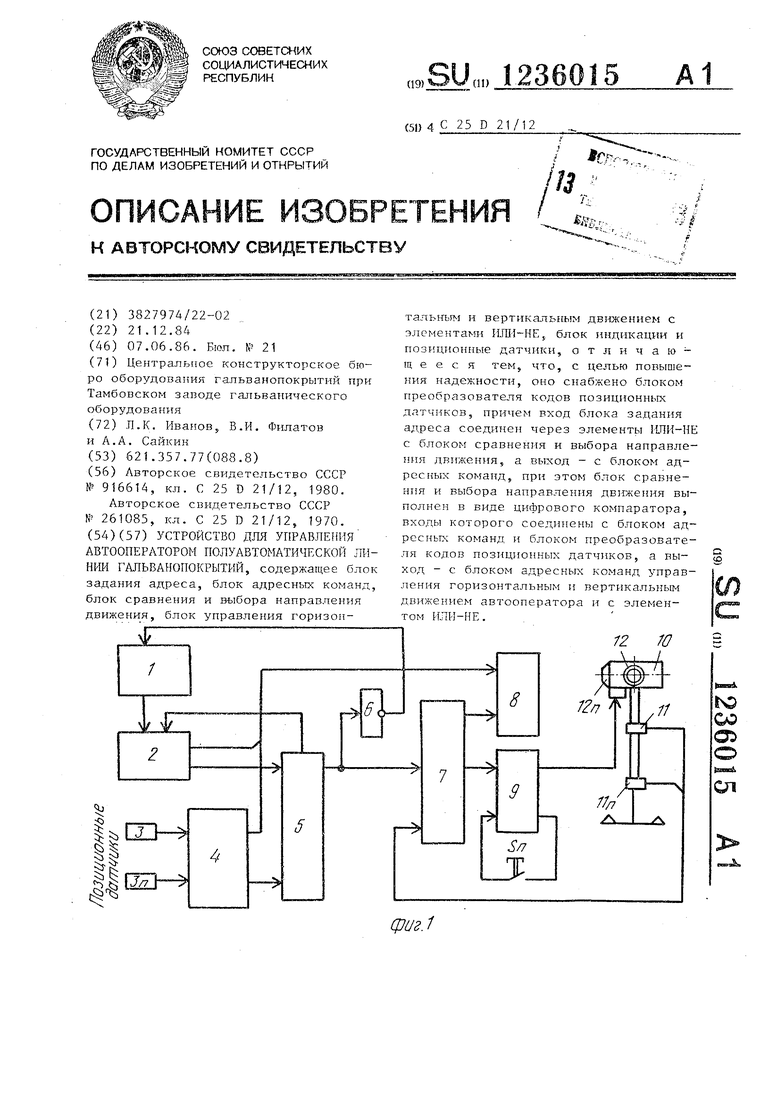
На фнг„ 1 изображена блок-схеь;а т и i i п устройства для управления автооиепа- г р i пi i
тором полуавтоматической гальнаничас- с i и iской 1-;а фи1.. 2 - принщтиапьпая - ки г ч И1 i i , т схема блока задания адреса; I a фиг 3 - и i ц и i i т блок адресных кс манд; на фиг,, ; - ni- i f i
блок преобразователя кодов позрпгио - и UTI i ii
ных датчиков; на фиг. 5 - блок срал- и
некия и выбора направления движения; i f
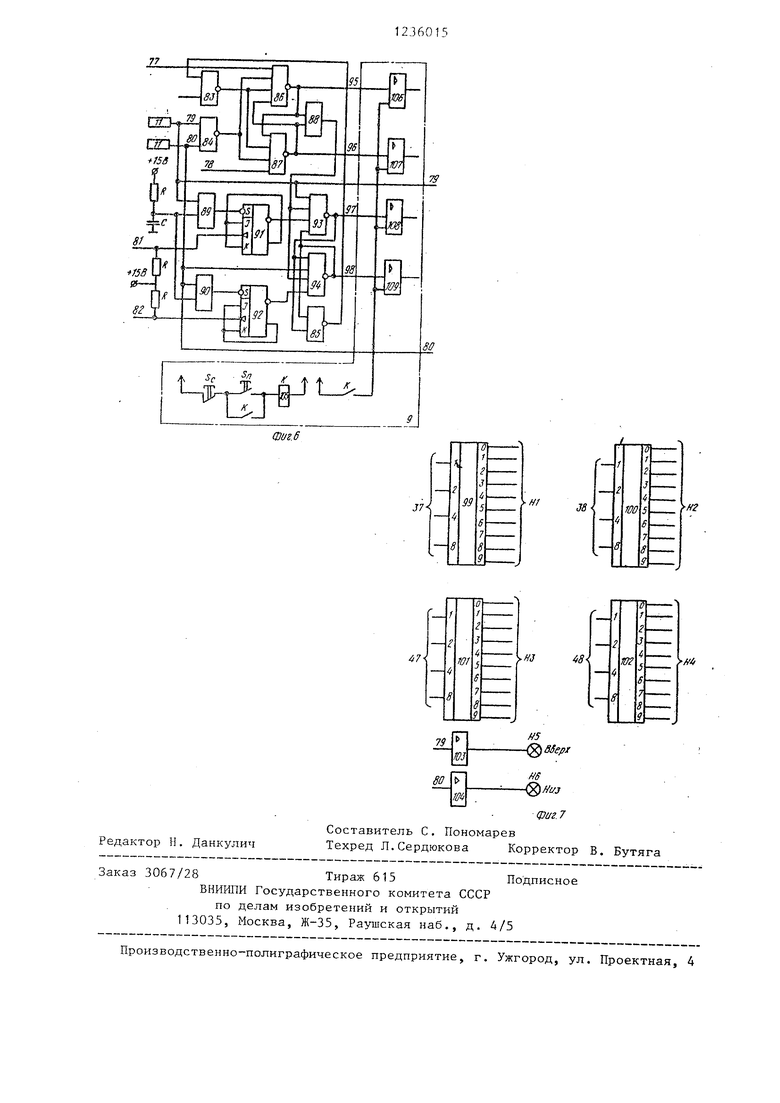
на фиг. 6 - блок упр;-1Рлени.ч горизон- i i гальпым и вepтикaльиы движен ;ем аггго- оператора и силово ;; блока; наii i
. 7 - блок ( i i,
Устройство содерла-тт (фиг. 1) блок п
1 задания адреса, блок 2 адресных ко-- т г т i ii i
манд, датчики 3, , . 3n останова и i т i t i in i i тонахождения автооператора на нозиик ии ii i линии, блок 4 преобразователя KO,:S,OP,-, ,,i i i г блок 5 срапнения и выбора HaiipaJJ.iieiui i i движения, элемент РШИ-НЕ 6. блок 7 управления гopизoнтaлы ы и вертикаль-i i ньм движением автооператора,. блок В, ,
индикации заданного адреса и псззишга, и,
местонахождения автоонератора и сило--i
вой блок 9, Схе/ а «к; ючает автоонеоа--i i
тор Юр датчики 11 ,. И ограг ичепипi i i| вертикального перемещения грузстзахв: -i, г
та в краЙ51ИХ положениях, элект эодвига- i,t i
тели 12, 12, и кнопку Sj подачи пита-i
ПИЯ выходным усилителям блока 9 . Блс}.; 1 задания адреса (фиг, 2) связан вхо-дом 13 с элементом 6 11. ; состой , ,
из адресных ююпок S , S,, , S,,, , ii i
элементов ИЛИ-НЕ 14 - 17 (ка;к;1ь;й на i i i
десять входов) и гяифраторов 18 и v „ii
имеющих каждый девя а входов и -ч - if
выхода 20 и 21,, соответствукл ;:- -; онрс-i i
деленному количесм ву позиций (ija:ni J пi jлинии.11(1
Блок 1 н:редназначен д,пя тгеровед; iи
сигнала дес гтичиог о itcjia от а/тресзл):;- i
кнопок S, S. , S iia си: ч-;а:Т)1
т П П-. - ,
декад (иоказань только декадь; I:;,;;HH; ;i -1
и десятков) дег Я пгчьси о код,а Л, -- Л,, ,i i г
ь. которые преобразуются :;л;;рра о--i
рами 18 и 19 в двоичио--десятич::П 1й . ii i i гA 20,, 21 5 еоответствуктатий 3a;ia:-iac;-;(-j ii,
ПОЗИДИИ останова, и по ВЫХО;-о i.:;BJ-::;;ii ч
с блоком 2.I.
обозначения PC фиг, 2;: i-ii i
1и::лС Г С:--1 (I -)
I
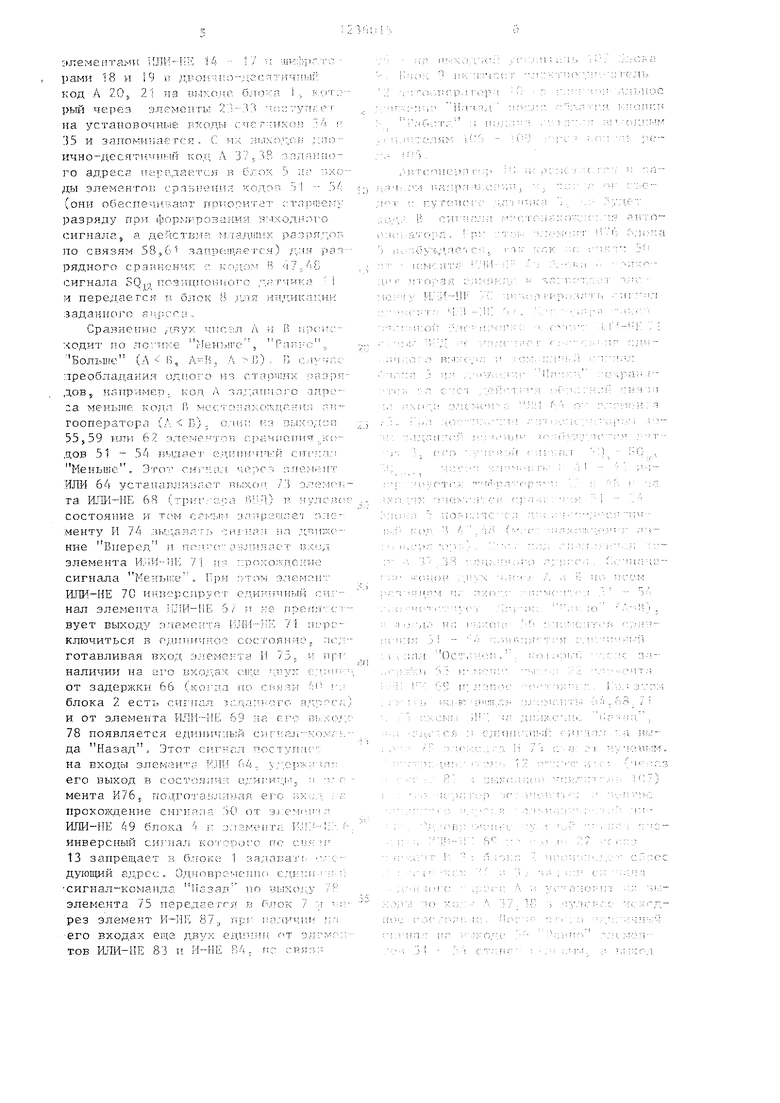
дов 51 - 54 и остальных элементов схемы выбора направления движения, (аждый элемент сравнения позгзоляет одновременно сравнивать по два разряда от каждого числа кода А 37,38 за- данного адреса и кода В 47,А8 позиционного датчика 3, .соответствующего номеру позиции местонахождения автооператора 10. Для упроп1ения схемы дв элемента сравнешш на чертеже услов- но показаны одним элементом 53,54 на восемь входов и на четыре выхода.
Блок 5 содержит элементы сравнения, состоящие из цифрового нуль-органа серии Логика-И, н-а пять вхо- дов и четыре выхода (55 - 63), элемент ИЛИ 64 на пять входов, задержки 65 и 66, элемент ИЛИ-ИЕ 67 на пять входов, элементы И.ПИ-НЕ 68 - 71,, на два входа, связи 72 и 73 между эле- ментами 68 и 71, элементы И 74 - 76 па три входаБлок 5 связан входами двоично-де- CHTH-Hibix кодов 37 - 38,47 и 48 и связями 40 и 50 с блоками 2 и 4, а вь ходами 22, 77 и 78 - с блоками 2 и 7 и элементом ИЛИ-НЕ 6 Сфиг. 5). Элемент ИЛИ-ИР. 6 является блокировочными и при отсутствии едрпсичного сигнала на выходах 77 и 78 элементов И 74 и 75 ВИД па горизонтальное движение подг о- тавливает по связи 13 цепь управления адресных кнопок блока 1 для включения следующег о адреса.
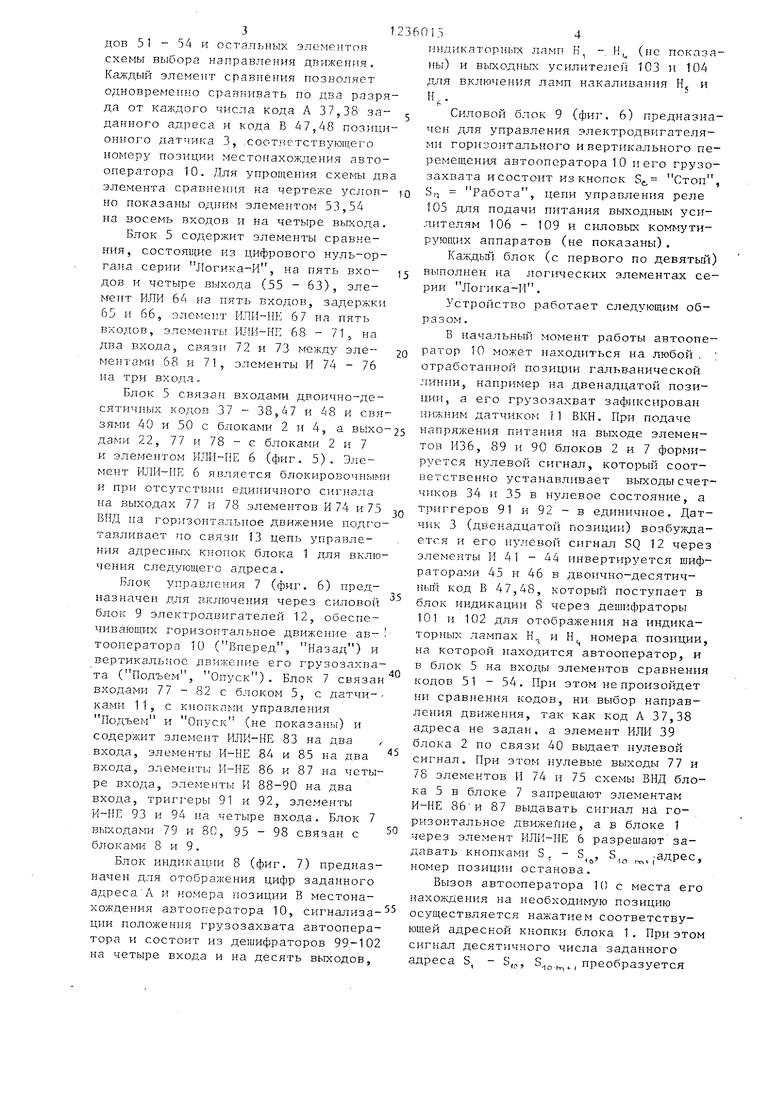
Блок управления 7 (фиг, 6) предназначен для включения через силовой блок 9 электродвигателей 12, обеспечивающих горизоргтальное движение автооператора 10 (Вперед, Назад) и вертикальное движение его грузозахва- та (Подъем, Опуск) . Блок 7 связан входами 77 - 82 с блоком 5, с датчиками 11, с KfionKai u-i управления Подъем и Опуск (не показаны) и содержит элемент ИЛИ-НЕ 83 на два входа, элементы И-НЕ 84 и 85 на два входа, элементы И-НЕ 86 и 87 на четыре входа, элементы И 88-90 на два входа, трип-еры 91 и 92, элементы И-НЕ 93 и 94 на ч-етыре входа. Блок 7 выходами 79 и 80, 95 - 98 связан с блоками 8 и 9,
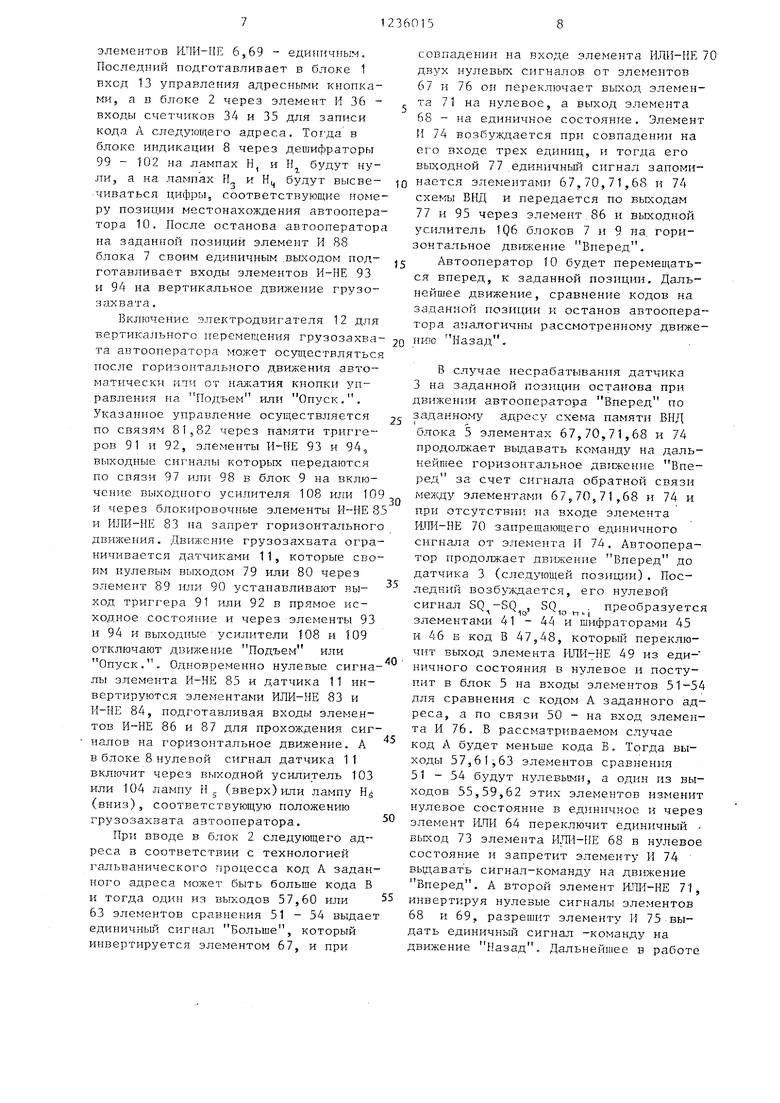
Блок индикации 8 (фиг, 7) предназначен для отображения цифр заданного а/дреса А и номера позиции В местонахождения автооператора 10, сигнализации положения грузозахвата автооператора и состоит из дешифраторов 99-102 на четыре входа и на десять выходов.
ю
15 20
25
0
0
5
индикаторных ламп Н, -. Н (пе показаны) и выходных усилителей 103 и 104 для включения ламп накаливания и
.
Силовой блок 9 (фиг, 6) предназначен для управления электродвигателями горизонтального и вертикального перемещения автооператора 10 и его грузозахвата и состоит из кнопок S Стоп, Srj Работа, цепи управления реле 105 для подачи питания выходнь усилителям 106 - 109 и силовых коммутирующих аппаратов (не показаны).
Каж,аый блок (с первого по девятьй) выполнен на логических элементах серии Ло1 ика-И.
Устройство работает следующим образом,
В начальный i-юмент работы автоопе- ратор 10 может паходргться на любой , : отработанной позиции гальванической линии, например на двенадцатой позиции, а его грузозахват зафиксирован нижним датчиком 11 ВКН. При подаче напряжения питания на вьпсоде элементов И36, 89 и 90 блоков 2 и 7 формируется нулевой сигнал, котор 1Й соответственно устанавливает выходы счетчиков 34 и 35 в нулевое состояние, а триггеров 91 и 92 - в единичное. Датчик 3 (двенадцатой позиции) возбуждается и его нулевой сигнал SQ 12 через элементы И 41-44 инвертируется шифраторами 45 и 46 в дво чно-десятич- ньш код В 47,48, который поступает в блок индикации 8 через дешифраторы 101 и 102 для отображения на индикаторных лампах Н, и Н номера позиции, на KoTopofl находится автооператор, и в блок 5 на входы элементов сравнения кодов 51 - 54. При этом не произойдет ни сравнения кодов, ни выбор направления движения, так как код А 37,38 адреса не задан, а элемент ИЛИ 39 блока 2 по связи 40 вьщает нулевой сигнал. При этом нулевые выходы 77 и 78 элементов И 74 и 75 схемы ВНД блока 5 в блоке 7 запреи(ают элементам И-НЕ 86 и 87 выдавать сигнал на горизонтальное движение, а в блоке t через элемент ИЛИ-НЕ 6 разрешают задавать кнопками S, - S , S .адрес, номер позиции останова.
Вызов автооператора 10 с места его нахождепия на необходим ю позицию осуществляется нажатием соответствующей адресной кнопки блока 1, При этом сигнал десятичного числа заданного адреса S, - S,,,, S.,., преобразуется
;1ле 4Сита И uJJlT-HE 14 -- 1/ . ,..)4 ; - рамн 18 и 14 V, дроИ :г;О -де(гт 1чПЫ1 код А ZOj 21 из BijxoMO бло- ;а i , WMT.V через элемепть: 21-- Г-; -их; vyn;: е i на установо чные входы счсг пгкол .: : 35 и загтомт-пзаетсп, С i-r-; ;51лход( ;;по- нчно-десяти-щын ког: Л зп. го адресл иерг -даеч ся в бгок Ь н; :;хо
(они обеспечиванл прпоритат ; тпра}ег-г;- )5азряду при (popMt-po3aiit H в;4ход1- пго сигнала; а действия по связям 58,,6 anpfiniae i - ) ;;,ля раярядного cpaBHCHMsv : кг1д: м В ч 7, В сигнала 50.; TTOsnuuoHiiorn д;: гчикя | и передается в блок В для ииД|-1к; П, :задан1К1ГО ям;; с г а ,
Сравнение ,,тг5ух Л н Б iiptnu - ходит но ло: ике МеьПлИ с Рпнп::., Больше (, А-В, Л - В) R .,;; преобладания одног о ii3 старших | ;азрядов, нзнриьшр. код А ялдантюго анре-- ;а меньше кода В iec i C aaxccKi eHiiM ан- гооператора (Л В) . олпн из гзыходси 55,59 M.ni-i 62 элементов сран пни«т .кодов 51 - 54 ныдае е,)-гчрь й cwrxaa Меньше. Этог cii-гхал черс arseMeirr ИЛИ 64 ycTanaiijiUjjacT лгихоп ,- та ИЛИ-ИЕ 68 (тригайса В17 1) н лулсяс- состояние и тем саг- ьп за Трзпи е n.:ic- :менту И 74 ль;.таватт, iMuaiaa на ние Внеред н п( авлляаС Т вх(;д элемента И.иИ-ИК 71 п г::рохоя-де;л е сигнала Мемыке . При ИЛИ-НЕ 70 нннерспрует е/ти;Л7Л1 ый сигнал элемента liJIH-liE 6/ л не лрепл ча - вует Еыходз элемсптя (Ul l-JiK yj ;илр; - ключиться в Г Д1П1нлт ое со агоянло,, лс/:- готавливая вхо,д д емеата Г 75, и лрг наличии на аго входах алу:-: a.-ianr; от задержки 66 (когла по сг- яал М aj блока 2 есть снгатал ia.ru X}x;ro адлгч-а) и от элемента ИЛП-МЕ 69 ла ci o 78 появляется ед1П1нлль;й cvu-4:ajt-Ko.v:;-а- да Назад. Этот сиг- а л лостуллс на входы элемен- л: ИЛИ 64,, ах:длч: лл его в состоялил е,,л-лл- а,1-, а - с мента Vi76, тюлгогэ л п а. ei O ах а :а прохождение ciii Hnria аС от э,аечгл ,-i ИЛИ-НЕ 49 блока i i; а,(лага: Е,ма,,, ;;: ;, инверсный cHia-ia.n КОТОРОГО по л 13 запре;цает в бпокк 1 задаг;а ,1л- а- t- ДУЮ1ДИЙ адрес, Одловре .елло с,д1:ала ;; а сигнал-команда Назад по virKonv / : элемента 75 нередаегся в fxfOK 7 ;, - а- рез элеме} Т И-НЕ 87,, лрг i;a:i 4im ari его входах еще двух eri,in;:;,ni f ,j элгмаа:- тов ИЛИ-НЕ 83 п И-НЕ В4 , ла алиа;
элементов ИПИ-НЕ 6,69 - единичным. Последний подготавливает в блоке 1 вход 13 управления адресными кнопками, а в блоке 2 через элемент И 36 - входы счетчиков 34 и 35 для записи кода А следующего адреса. Тог-да в блоке индикации 8 через дешифраторы 99 - 102 на лампах Н, и Н будут нули, а на лампах Н„ и Нц будут высве- чиваться цифры, соответствующие номеру позиции местонахождения автооператора 10. После останова автооператора на заданной позиций элемент И 88 блока 7 своим единичным .выходом под- готавливает входы элементов И-НЕ 93 и 94 на вертикальное движение грузо- 3ахвата.
Включение электродвигателя 12 для вертикального перемещения грузозахва- та автооператора может осуществляться после горизонтального движения автоматически или от налсатия кнопки управления на Подъем или Опуск.. Указанное управление осуществляется по связям 81,82 через памяти триггеров 91 и 92, элементы И-НЕ 93 и 94, выходные сигналы которых передаются по связи 97 или 98 в блок 9 на включение выходного усилителя 108 или 109 и через блокировочные элементы И-НЕ 8 и ИЛИ-НЕ 83 на запрет горизонтального двилсения. Движение грузозяхвата ограничивается датчирсами 11, которые своим нулевым выходом 79 или 80 через элемент 89 или 90 устанавливают вы- ход триггера 91 или 92 в прямое исходное состояние и через элементы 93 и 94 и выходные усилители 108 и 109 отключают движение Подъем или Спуск.. Одновременно нулевые сигналы элемента И-НЕ 85 и датчика 11 инвертируются элементами ИЛИ-НЕ 83 и И-НЕ 84, подготавливая входы элементов И-НЕ 86 и 87 для прохождения сигналов на горизонтальное движение. А в блоке 8 нулевой сигнал датчика 11 включит через выходной усилитель 103 или 104 лампу Н (вверх)или лампу Hg (вниз), соответствующую положению грузозахвата автооператора,
При вводе в блок 2 следующего адреса в соответствии с технологией гальванического процесса код А заданного адреса может быть больше кода В и тогда один из выходов 57,60 или 63 элементов сравнения 51-54 выдает едипичньш сигнал Больше, который инвертируется элементом 67, и при
Q jc
п 5
5
0
совпадении на входе элемента ИЛИ-НЕ 70 двух нулевых сигналов от элементов
67и 76 оп переключает выход элемента 71 на нулевое, а выход элемента
68- на единичное состояние. Элемент И 74 возбуждается при совпадени на его входе трех единиц, и тогда его выходной 77 единичньш сигнал запоминается элементами 67,70,71,68 и 74 схемы ВИД и передается по выходам 77 и 95 через элемент. 86 и вьгходной усилитель 1Q6 блоков 7 и 9 на. горизонтальное движение Вперед.
Автооператор 10 будет перемещаться вперед, к заданной позиции. Дальнейшее движение, сравнение кодов на заданной позиции и останов автоонера-- тора аналогичны рассмотренному дв1та :е- нюо Назад.
В случае несрабатывания датчика 3 на заданной позиции останова при движении автооператора Вперед по заданному адресу схема памяти ВНД блока 5 элементах 67,70,71,68 и 74 продолжает выдавать команду на дальнейшее горизонтальное движение Вперед за счет сигнала обратной связи между элементами 67570,71,68 и 74 и при отсутствии на входе элемента И.Ш-1-НЕ 70 запрещающего единичного сигнала от элемента И 74. Автооператор продолжает движение Вперед до датчика 3 (следующей позиции). Последний возб ждается, его нулевой сигнал SO -SO , SQ, . преобразуется
л lO Ю tn - j
элементами 41 - 44 и шифраторами 45 и 46 Б код В 47,48, который переключит выход элемента 1 ШИ-НЕ 49 из еди- ничного состояния в нулевое и поступит в блок 5 на вхо.ды элементов 51-54 для сравнения с кодом А заданного адреса, а по связи 50 - на вход элемента И 76. В рассматриваемом случае код А будет меньше кода В. Тогда выходы 57,61,63 элементов сравнения 51-54 будут нулевыми, а один из выходов 55,59,62 этих элe eнтoв изменит нулевое состояние в единичное и через элемент ЯПИ 64 переключит единичный - выход 73 элемента ИШ-НЕ 68 в нулевое состояние и запретит элементу И 74 выдавать сигнал-команду на движение Вперед. А второй элемент ИПИ-НЕ 7, инвертируя нулевые сигналы элементов 68 и 69, разрешит элементу .И 75 выдать единичньй сигнал -команду на движение Назад. Дальнейшее в работе
схемы устройства ана.логн чно расс;мот-рр.иному движению И, -итал , I
Такая схемя выбора напратзлетп- я движения позволяет автоматк-честа-: определять направления горизонтэл1.пого движения, независ1- мо от | г;ози- ции) остановки автооперато|1а, и обнаружить неиспрапный датчик, когда автооператор будет повторно про ;;одят мимо датчика заданнот о ад11еса.
м:: :: ; : ::: :л c у;;i-тоис тво оолее па- , . pn icTc. ак :,л { ч-о сокра ца- С ; KOiTU v( riji ;);: V по. . и Т СЯ И U;-: 1ч1;;- .;( tCH С . я л. 4v:i;piifib:o в С:.:-ок-::х1-мг ; ; : Л : i.:io, л пп рентные си-уации. Ipir ::)Т(Г/ ;,)-;-OM;V;I: ;-: Пра . ;-;т;:т,-;-.;. . ;;-.:п ;;;-;(--- (-.ПГ1Г:3
И ,IГ)-. :; :i VVM ц ;/ ;te П ЩИСЛП f)T
titJT -
---1 I
.1 i lH
в
.
1:1L,..1J
, .1
-f;s:
й
А
V
77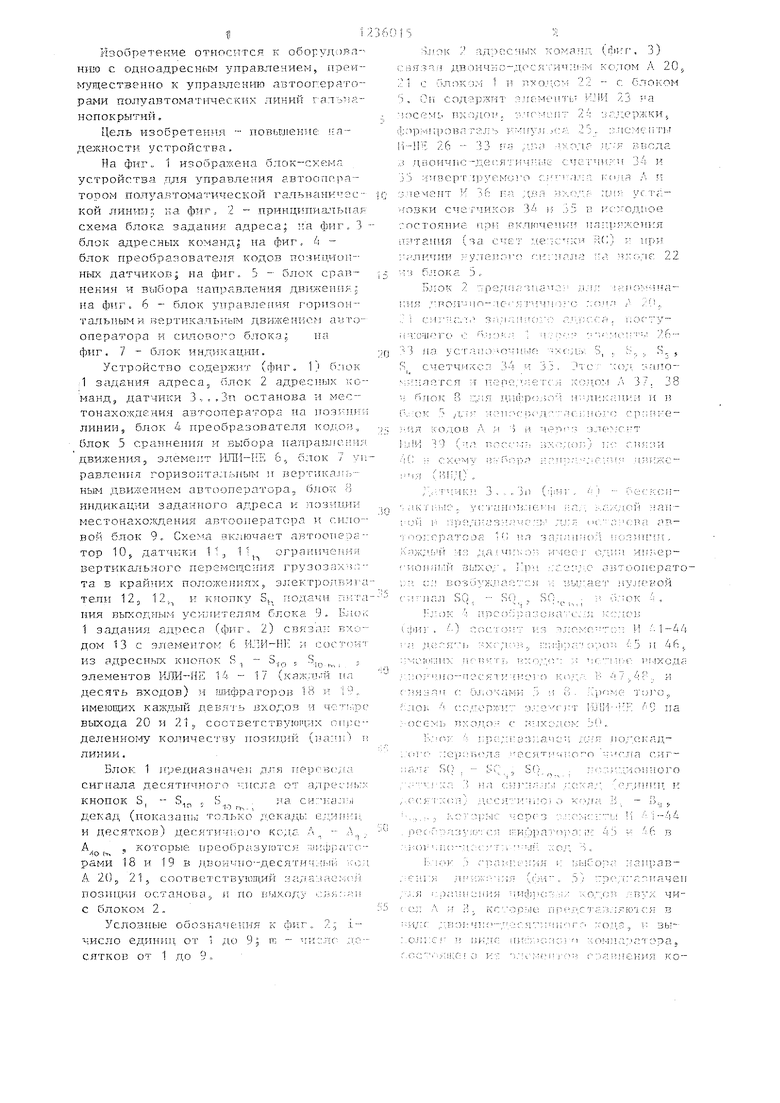
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |
| Устройство для управления полуавтоматическими линиями обработки деталей в жидкостях | 1982 |
|
SU1120037A2 |
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для управления подвижным роботом | 1985 |
|
SU1344595A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Ассоциативное запоминающее устройство для дисплея | 1986 |
|
SU1322375A1 |
| Устройство для программного управления автооператором | 1987 |
|
SU1536355A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
Редактор Н. Данкулич
ф1/г. 7
Составитель С, Пономарев Техред Л.Сердюкова Корректор В. Бутяга
Заказ 3067/28Тираж 615Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Hf
J8
т
нг
Ю1
НЗ
48
юг
м
f/S
}Bfepi
нв
| Авторское свидетельство СССР № 916614, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОЛУАВТОМАТИЧЕСКИМИ ЛИНИЯМИ ОБРАБОТКИ ДЕТАЛЕЙ В ЖИДКОСТЯХ | 0 |
|
SU261085A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
