Изобретение относится к области комплексной автоматизации производственных процессов и может быть применено в гальванических цехах для управления автооператором на автоматических линиях -с программным упраьлением.
Известен комамдоаоларат для управленил автоаператором на гальванических линиях, содержащий устройство поиска подпрограмм, програ1ммный блок, синхронизатор, блок выбора технологических направлений, датчики истинного .положения айтооператора, блок отработки .информации, блок полуавтоматическог.: у|Пра1вления и блок выбора .направления вперед-назад, блок вызова оператора, схему блокировки в зоне и силовой -блок.
Известный командоаппарат позволяет вести большое количество технологических программ, в том числе программ, связанных с осуществлением как одинакового пок рытия, так и различных видов гальванопокрытий, при полной независимости выбора технологичеокэго процесса от .субъективных качеств оператора на гальванической линии. Однако при агрегатном построении автоматических линил гальванопокрытий работа линин зайисит от работы всех входящих в систему узлав и элементов, из жоторых .наиболее сложными и (важными являются командоаппараты и автоапе раторы. Выход из строя хотя бы одного из
этих устройств приводит к останову всей линии, а поломка автооператора - к более длительному простою линии.
Цель изобретения - повыщение надежности 1комаЕДоа ппарата в работе и обеспечение; взаимного дублирс«вания автооператоров пр.ч аварийных ситуациях.
Это достигается тем, что командоаппараг снабжен ком мутирующ:им устройством и бе:контактными датчиками позиций, а устройство поиска подпрограмм выполнено в виде объединенных на входе программного блока, -блока выбора подпрограмм по .свободным ваннам, блока выбора подпрограмм по зовущим ваннам и блока овязи, вход которых связан с выходами программного бло.ка и синхронизатора. Соединенный с блоком вызова автооператора блок выбора подпрограмм по зовущим ваннам и блок выбора подпрограмм по свободным ваннам подключены через коммутирующее устройство к датчикам истинного положения автоопер ато.р а.
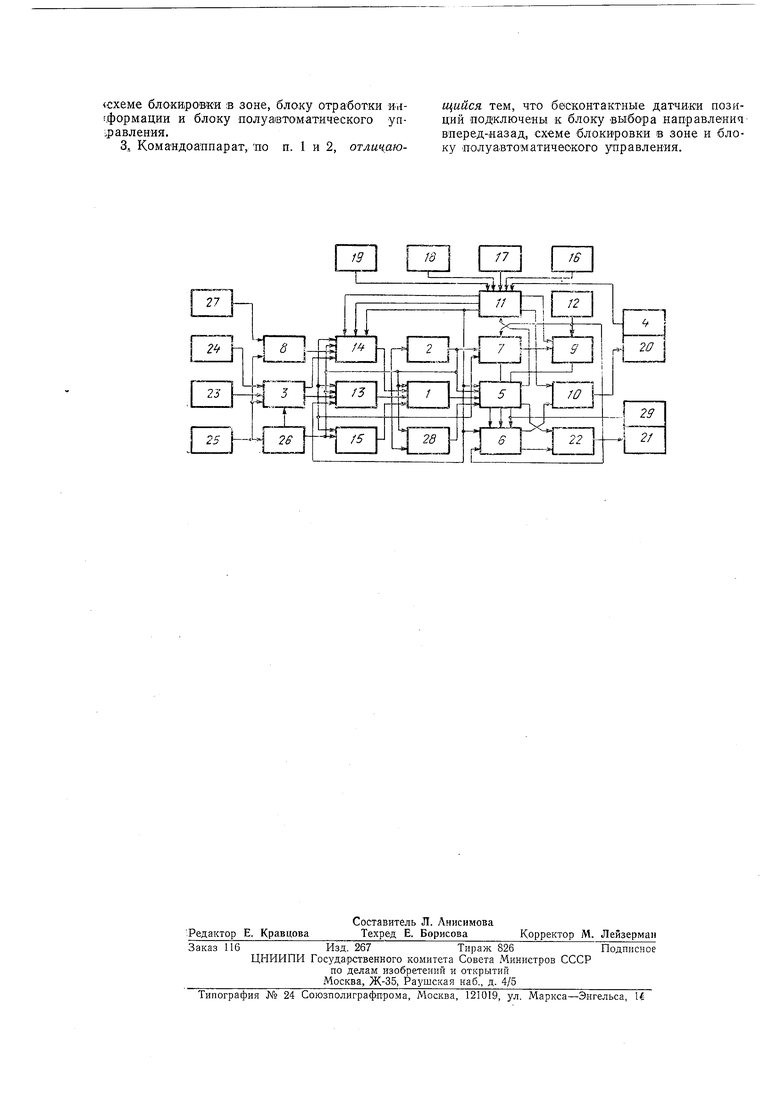
Вход коммутирующего устройства подключен к датчикам истинного положения и бло|Кам отработки информации управляемого и дублирующего автооператоров, программному блоку я синхронизатору дублирующего автооператора, а выход - к силовому блоку, .схеме блокировки в зоне, блоку отработки информации и блоку полуавтоматического уп,равлеч1ия. Бе€конта1ктные датчики позиций мо гут быть подключены к блоку .выбора напраз ления вперед-назад, схеме блокировки в зоне и блоку полуавтоматического управлеиия. На чертеже представлена блок-схема пред ложеННого :командоаппарата. Командоа ппарат для управления автооператором па гальванических линиях состоит из устройстза ионска- подпрограмм, программного блока /, синхронизатора 2, блока выбора технологических направлений 3, датчикогв истинного положения автооператоров 4, блока отработки информации 5, блока полуавтоматического уп.равления 6, блока выбора направления В перед- назад 7, блока вызова автооператора 8, схемы блокировки :в зоне 9, силового блока 10, коммутирующего устройства 11 и бесконтактных датчиков позиций 12. Устройство поиска подпрограмм выполнено в виде объединенных иа входе программного блока / блока вы-бора подпрорраэдм по свободным ваннам 13, блока выбора подпрограмм 1ПО зовущим (ваннам 14 и блока связи 15, зход которых связан с выходами програм много блока / и синхронизатора 2, яричем соединечный с блоком вызова автооператора 8 блоч .выбора подпропрамМ по зовущим ваннам 1и :блок выбо.ра подпрограмм по свободным ваНнам 13 подключены через коМмутирующее устройство и 1К датчикам истинного положения автооператора 4, вход коммутирующего устройства 11 подключен к датчикам истин«ого положения 4, 16 и к блокам 5, 17 отработки информации управляемого и дублирующего автооператоров, программному блоку 18 и синхронизатору дублирующего автооператоipa 19, а выход - К силовому блоку W, схеме блокироВКИ в зоне Я блоку отработки информации 5 и блоку цолуавтоматического управления 6. Бесконтактные датчики позиций 12 подключены « блоку выбора направления впо|ред-назад 7, схеме блокировки в зоне 9 и блоку полуавтоматического управления 6. Командоаппарат, управляющий работой автооператора 20, механизмами 21 открывания «рыщек и .качания рамы с деталями через соответствующие силовой блок 10 управлении механизмами автоолератора и силовой блох 22 управления механизмами открывания крышек и Качания рамы с деталями, содержит датчики 23 выбора технологических направлений, соединенный с блок 24 передачи информации от предыдущего автоонератора « последующему, блок 25 датчиков выбора времен и свободности ванн, реле времени 26, управляемые датчиками 25, каждый из которых подключе1н к блоку 3 выбора технологических направлений. Блок 7 выбора технологических направлений, блок 8 иолуавтоматидеского вызова автооператора, входы которого связаны с датчиками блока 25 и с датчиками 27 монтажно-демонтажных столов и хряиилищ рам, подключены к блоку выбора подпрограмм по зовущим ваннам 14. Рассмотрим поочередно работу командоаппарата в режимах нормальной работы и взаимного резервирования автооператоров. В автоматическом режиме при нормалыной работе, команды на перемещение автооператора 20 формируются в командоаппарате либо при нажатии соответствующих кнопок в блоке 8 полуавтоматического вызова автооператора, либо под воздействием сигнала |БЫЗо.ва на п )Зицию, где закончилась выдержка времени или осуществляется передача от предыдущего автооператора к рассматриваемому. В первом случае информация о занятости и свободности участков снимается с датчи ков 27 ;МОнтажно-демонтажных столов и хранилищ рам и с датчи ков 25 выбора времени и свобод ности ванн и вводится в блок 8 полуавтоматического вызова aiBTOonepaTopa, который и выдает сигнал вызова. Во втором случае сигнал вызова в , где закончилась выдержка времени, появляется иа выходе блока 3 выбора технологических направлений при совпадении 1сигналов с датчиков 23 выбора технологичеоких направлений, датчиков 25 выбора времени ч свободиссти ва-ан и сигиала окончания выдержки времени с реле времени 26 либо сигналов с блока 24 передачи информации от предыдущего автооператора к последующему для ванн передачи. Датчики 23 выбора технологических направлений, находящиеся непосредственно на ванне и дающие сигнал пр. условии нахождения рамы с деталями на этой ванне, выполнены IB виде набора двоичных датчиков с выходом иа дещифратор, который выдает при определенной двоичной комбин.,цни считывающих щтырей унитарный сигнал только на одном из своих выходов, определяющих то или иное направление гальваНОлроцесса. В свою очередь, сигнал свободности с датчиков 25 вьгбора времен и свободности ванн, также находящихся на борту ванны, куда будет впоследствии положена рама по заданному направлению, появляется только прл отсутствии загрузки ванны. Полученные таким образом сигналы вызова автооператора 20 управляют работой блока 14 выбора подпрограмм по зовущим ваннам. Механизмы автооператора 20 должны (находиться в крайнем верхнем положении с расцепленными захвата.Ми, а сам автооператор может занимать любую позицию обслуживаемого им участка, кроме передаточных ванн. Блок 14 выбора подпрограмм по зовущи:,1 аннам отыскивает подпрограмму ио зовущел озиции и производит запись ее в программый блок }, откуда программа подается на неосредственное исполнение, путем выработкл омаНд иа перемещение «вперед назад, «пееключение скорости, «останов, «влево - в ередину - BnpaiBO, «вниз, «захват ра-мы с еталями, «вверх в блоке 5 отработки инормации. Последовательное исполнение подрограммы в выщеназваниом порядке заканивается перемещением вппз при приходе трелы автоонератора 20 в крайнее нижнее
лоложение, при котором при наличии затрограммироваиного поиска и при наличии сигнала с датчика нижнего положеиия, входящего в датчики 4 истиниого положения, осуществляется поиск подт1рограмм по свободной позиции В блоке 13 выбора подпрограмм по сво:бодным ваннам. Найденная подпрограмма запоминается не пОСредствсИ::э п блСКе 13. По оканчании поиока и записи найденной подпрограммы осуществляется дальнейщее исполнение подпрограммы по зовущей позиции. Механизмы автооператора 20 поднимают захваченную раму с деталями, и происходит смена подпрограмм 3 программном блоке 1 при поязлени сигналов с верхнего датчика, входящего в датчики 4 истинного положения, и синхронизатора 2. В этом положении про1Гсходит смена подпрограмм, причем 1овая подпрограмма МОжет быть либо произволыюй, жестко заданной .подпрограммой следующей за выщепазвапиой программой по зовущей позидии, либо найденной подпрограммой по свободной позиции. Выбор произвольных подпрограмм, ОБязапных с переездом на .-позицию i; последующим многократным окунанием в ванну происходит с помощью блока 15 связи подпрограмм.
Подпрограмма по зовущим ваинам записывает во время движения стрелы а1втоо.ператора 20 снизу вверх в кратковременпое запоминающее устройство в блоке 15 азязи подпрограмм произвольную подпрограмму, а в ,нем положении, по сигналам с синхронизатора 2 осуществляется (вначале ее сброс и затем запись произвольных подпрограмм в программиый блок / и их исполнение в блоке 5 отработки информации, по -которым возможпа также технологическая задержка, осуществляемая с помощью реле 28 регулируемой .задерж.ки в (нижнем положении стрелы автооператора без расцепления с катодной рамой. По окончании задерж.ки вводимой в блок 5 отработки информации (поднимается механизм азтооператора 20. По окончании произвольных подпрограмм (либо при их отсутствии) подпрограммой по зовущей ванпе осущест1вляется запись подпрограммы по свободной ва-пне. Конец подпрограмм с синхронизатора 2 выбирает из запоминающего устройства в блоке 13 Выбора подпрограмм по свободной вап,не подпрограмму по свободной позиции и записывает в программный блок / с последующим исполнением ее в блоке 5 отработки информации, за-канчивающимся закладкой катодной .рамы с деталями либо в ванну с выдержкой времени, либо в ва-нну передачи ч (Приходом 1В исходное положение, определяе:мое в последнем случае позициями, исклю- чающими позицию -передачи.
Таким -образом, выполняется технологическая .программа путем вызова автооператора 20 IB зовущую ванйу, последующего исполнения жестко заданных .подпрограмм, закладкп рамы с деталями в ванну, воэвращения s исходную позицию, последующего .вызова в Другую зовущую ванну и т. д. Исполнение подпрограмм осуществляется в блоке 5 отрабо ки информации совместно с блоком 7 выбора направле-ния вперед-назад, схемой 9 блокировки в зоне по датчикам истинного положения и датчикам позиций. Для задания нанра-эления перемещения автооператора 20 в направлении вперед-назад, -снижения CKOpocTii его и последующего останова на позиции -служит блок 7 выбора напра вления впередназад, который сраВ1нивает истинное ноложение автооператора 20, определяемое в данном случае сигналами с датчиков 12 позиции с сигналами подаваемой с п-рограммного блока / подпрограммы.
Блок 7 выбора направления впер-;д-назад вырабатывает сигнал, определяющий направление перемещения в зависимости от того, .больще или меньще предыдущего будет новое
значение позиции по программе, сигнал переключения скорости при совпадении истинного полОЖения с программой на некотором упрежденном расстоянии от центра и сигнал точного останова в центре позиции
Все эти сигналы вводятся в блок 5 отработки информации, который задает движение автооператору 20 через силовой блок 10 управления механиз.мами автооператора до полного Совпадения сигналов программы с сигналам:
датчиков 12 позиций, при котором вначале осуществляется нереключение скорости движения aiBTOO.nepaTopa 20, а затем и полный останов его.
После точного останова на определенной
позиции механизма автооператора 20 сове.г,щают поочередно движения налево - в середину - направо, вниз с возможной -последующей задержкой внизу или без нее вверх с захватом или без захвата; при окунании - мпогоиратное повторение Движений вниз-вверх. Останов каждого из перечисленных движений осуществляется по сигналам с датчиков 4 .(или 16) истинного положения Зправляемог) автооператора (соседнего автооператора) п-ри
их совпадении -с сигналами подпрограммы. Для взаимной блокировки автоо-ператорол при работе одного из них на позиции передачи Служит схема 9 бл-о;кировки .в зоне, которая вы.дает сигнал запрета вперед-
назад в бло-к 5 переработки информации при нахождении соседнего автооператора в зоне передачи и при появлении программы движения в эту зо-ну рассматриваемого автооператора 20. Блокировка осуществляется при его
подходе на соседнюю с позицией передачи позицию. Управление механизма-ми 21 открыва,ния крыщек и качания рамы с деталями осуществляется от блока 5 отработки информации через силовой блок 22 управления мехлнизмами открывания крыщек и качания рамы с деталями, при этом движение автоопер а.тора 20 вниз возможно только при пол-ном открываНии -крыщек, либо полном останове двигателей .качания рамы с деталями, которы-.
фиксируются датчиками 29 механизмов открывания крышек и качания рамы с деталями.
Открывание крышек и останов двигателей качания рамы с деталями осуш;ествляется непосредственно это лрограмме нри приходе автооператора 20 на эту позицию. Источники питания ванн 1в«лючаются непосредственно сигналом с датчиков блока 25 BHi6opa времен и -свободности ванн при нахождении катодной рамы € деталями в этой ван«е, а отключение- при подъеме рамы и выходе штырьков программоносителя из датчиков.
В Случае выхода из строя одного из автооператоров либо При профилактических ремонтах автоолератор лереносится с линии в специальное место, а командоапиарат, управляющий работой этого автооператора, переводится На режим взаимного резервирования азтооператоров с шомощью -коммутирующего устройства 11. В режиме .взаимного резервирования, наиболее подходящего для двух автоолераторов л называемого, в этом случае, взаимным дублированием автооператоров, отключаются датчи-ки 4 истинного по ложения автооператора, силовой блок W уп)равления механизмами автооператора и вместо них Б командоалпарат вводятся датчики 16 истинного положения соседнего автооператора, а блок 5 отработки информации совместно с блоком 17 отработки информации дублирующего командоаппарата подключается к силовому блоку управления механизмами соседнего автооператора.
Кроме того, для взаимной блокировки лоиока лодпрограмм ло зовущим ваннам в блок 14 выбора подпрограмм ло зовущим ваннам вводятся сигналы с программного блОКа 18 к синхронизатора 19 дублирующего командоалнарата и сигналы для запрета |блокиро1вки лозиции лередачи в схему 9 блокировки в зоно. Соседний автооператор вызывается :по зовущим ваннам с любого участка нри наличии исходного состояния автоолератора и нулевых условий обоих командоаппаратов (отсутстви-е взведенных подпротрамм на обоих комалдоаппаратах) аналогично работе в нормальло г режиме.
То же самое лроисходит и лри нахождении лодлрогра-ммы по зовущей ванне, однако найденная подпрограмМа занрещает лри возможном одновременном вызове на участке другого автооператора нахождение лодпрограмм по зовущей вание путем блокировки блока 14 выбора лодпрограмм ло зовущим вач.нам -сигналами подпрограммы с программного блока 18 дублирующего командоаппарата, если таковая лоясвилась раньщр. чем закончился поиск в блоке 14 выбора лодпрограмм ло зовущим ваннам, в противном случае действует обратноналравленная блокировка. При нахождении подпрограммы поиск прекращается, а блок 14 выбора подпрограмм по зовущим ваннам приводится ло сигналу с синхронизатора 19 дублирующего
командоаппарата в исходное начальное лолэйкение.
Дальнейшее движение автооператора осуществляется ло цепи лодпрограмм, следующих за найденной подпрограммой по зову-щей валне, по сигналам с блока 5 отработкинформации, либо с блока // отработки илформации дублирующего командоаппарата
через СВОЙ силовой блок управления механизмами автооператора.
Для работы автоОПератора при управленил с пульта предусмотрен :бло.к 6 полуавтоматического управления автооператором ло датчи«ам 12 позиций и датчикам 4 истинного положения автооператора, которые отключаются от блока 6 в режиме взаимного дублирования автооператорав. Блокировка блоков 5 и 12 осуществляется взаимно и позволяет устранить нежелательные аварии автооператора. Команды с блока 12 подаются на силовой блок 10 управления механизмами автооператора и силовой блок 22 управления механизмами открывания крышек и качания рамы с
деталями.
Предмет изобретения
I. Командоаппарат для управления автооператором на гальванической линии, содержащий устройство поиска подпрограмм, лрограммиый блок, синхронизатор, блок выбора технологических направлений, датчики истинного положения автооператора, блоК отрабо1ки инфОрмации, (блок полуавтоматического управления и блок выбора направле-ния впередназад, блок вызова оператора, схему бло«ир01вки в зоне, силовой блок, отличающийся тем, что, с целью повышения его надежности в работе и обеспечения взаимного дублирования автооператоров при аварийных Ситуациях,
он Снабжен кОМмутирующим устройством и бесконтактными датчиками лозиций, а устройство поиска подпрограмм выполнено в вИхТ,г объединенных на входе программного блока блока выбора подпрограмм по свободным ванлам, блока выбОра подпрограмм ло зовущим ваннам и блока Связи, вход которых связан с выходами программного блока и синхронизатора, причем соединенный с блоком вызова автооператора блок выбора подпрограмм по
зовущим ваннам и блок выбора подпрограмм по свободным ваннам подключены через коммутирующее устройство К датчикам истинного положения автооператора.
2. Командоалларат по п. 1, отличающийся
тем, что вход коммутирующего устройства подключен к датчикам исти гного положения и блокам отработки информации управляемого И дублирующего а(втооператора, программному блоку и синхронизатору дублирующего алтооператора, а выход - к силовому блоку,
«;хеме блокировки в зоне, блоку отработки iiгформации и блоку полуавтоматического уафавления,
3, Комаядоаппарат, по п. 1 и 2, отлич.ающийся тем, что бесконтактные датчики позиций подключены к блоку выбора направленит вперед-назад, схеме блокировки в зоне и блоку полуавтоматического управления.

| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ КОМАНДОАППАРАТ | 1970 |
|
SU264504A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИЛИНИЯМИ | 1972 |
|
SU336648A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 1972 |
|
SU331009A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ УСТРОЙСТВОМ | 1971 |
|
SU312241A1 |
| ПТБ | 1973 |
|
SU406962A1 |
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| УСТАНОВКА ДЛЯ ПРОВЕРКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОМОБИЛЕЙ | 1969 |
|
SU238197A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ НАНЕСЕНИЯ ГАЛЬВАНИЧЕСКИХ ПОКРЫТИЙ | 1970 |
|
SU287486A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АВТООПЕРАТОРАМИ АВТОМАТИЧЕСКИХ ЛИНИЙ ГАЛЬВАНОПОКРЫТИЙ | 1971 |
|
SU294870A1 |
| Устройство для управления автооператором полуавтоматических линий гальванопокрытий | 1977 |
|
SU708001A1 |
