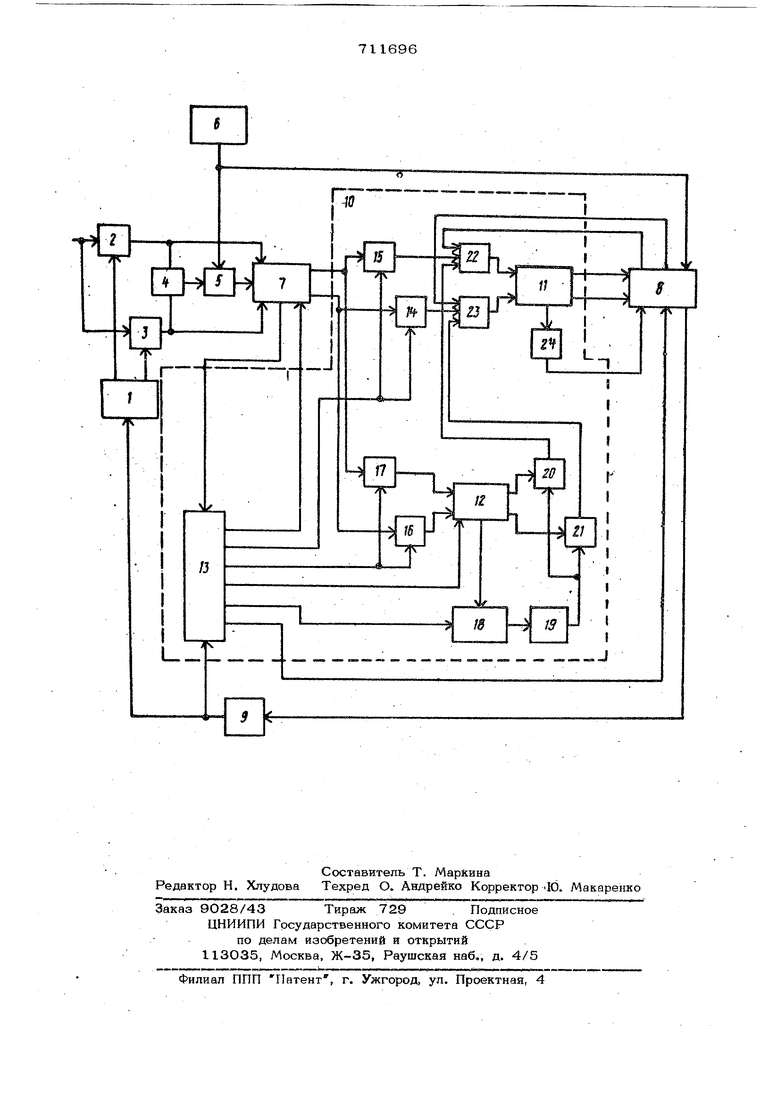
(54) ЦИФРОВОЕ УСТРОЙСТВО СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ счетчика и сумматора по модулю два, выход .которого соединен с одним входом двухвходовой схемы И, другой вход которой подключен к выходу кварцевого генератора, а выход двухвходовой схемы И соединен со счетным входом реверсивного счетчика, выходы сложения и вычитания которого соединены с двумя входами управляющего элемента, тре,тий вход которого подключен к выходу кварцевого генератора, а выход управляющего элемен та через делитель соединен .с шиной продвижения регистра сдвига с обратной связью, введен цифровой фильтр, при этом выходы сложения и вычитания реверсивного счетчика через цифровой фильтр подключены к двум соответствующим входам управляющего элемента, дополнительные выходы которого подключены к входам вычитания и сложения цифрового фильтра, соответствующий выход которого подключен к дополнительному входу управляюше элемента, при этом выход делителя подключен к первому управляющему входу цифрового фильтра, выход обнуления и второй управляющий вход которого соединены соответственно с дополнительными входом и выходом реверсивного счетчика.На чертеже изображена структурная электрическая схема предложенног;о устройства. Цифровое устройство слежения за задержкой содержит опорный генератор 1 псевдослучайных видеопоследовательностей , выполненный на регистре сдвига с об ратной связью, два перемножителя 2 и 3, сумматор 4 по модулю два. двухвходовую схему И 5 кварцевый генератор 6, реверсивный счетчик 7, управляющий элемент 8, делитель 9 и цифровой фильтр Ю, состоящий из счетчиков 11 и 12, блока 13 управления, элементов И 14, 15, 16, 17, 20, 21, преобразователя код - частота 18, делителя 19, элементов ИЛИ 22 и 23, блока 24 индикации нуля. Устройство работает следующим образо В установившемся режиме знак сигна па рассогласования между входным и опорным (пес) псевдослучайным сигналом вводится с частотой Ропр в счетчики 11 и 12 цифрового фильтра 10 путем подачи импульсов опроса Uonp с вы ходов блока 13 управления на элементы 16 и 17 соответственно, после чег реверсивный счетчик 7 обнуляется импу сами обнуления с выхода блока 3 управления. Импульсы обнуления UoSn акже следуют с частотой FOPIB- В счетике 12 содержится информация о допплеовской частоте входного сигнала, и. пребразователь 18 код - частота, который правляется счетчиком 12, выдае± им-ульсы с частотой, пропорциональной допплеровской частоте входного сигнала, а четчик 11 через делитель 19, служащий ля уменьщения неравномерности следования выходных импульсов преобразователя 18 и элементов И 20 или 21 в зависимости от знака допплеровской частоты. На счетный вход преобразователя 18 подаются импульсы частоты Fn с выхода блока 13 управления. На вход управляющего элемента 8 поступают ик пульсы управления частоты РуЭ . С приходом каждого импульса Ui|3 в элемент 8 управления осуществляется операция добавления импульсов в поступающую последовательность с кварцевого генератора 6 или операция исключения согласно знаку числа, записанному в счетчике 11, а количество операций добавления или исключения определяется величиной числа, записанного в счетчике 11. При этом после каждой операции добавления или исключения списьюается единица из сч тчика 11 путем подачи импульса с выходов управляющего элемента 8 на вход счетчика 11 через элемент ИЛИ 22 или 23. Блок 24 индикации нуля служит для прекращения операций добавления или исключения при достижении нуля в счетчике 11 и не допускает операции добавления или исключения, если к моменту прихода импульса Uu3 на вход управляющего элемента 8 в счетчике 11 содержится нуль. Тактовые импульсы, формируемые делителем 9, являются входными импульсами опорного генератора 1, а также задакж1ими импульсами блока 13управления. В режиме захвата устройство работает следующим образом. В исходном состоянии блок 13 управления выдает только импульсы обнуления обн с частотой Гопр . т.е. устройство слежения находится в разомкнутом со стоянии, при этом счетчик 12 находится в нулевом состоянии. Когда входной ПСС окажется в апертуре дискр-иминационнойхарактеристики, на выходе реверсивного счетчика 7 появится сигнал рассогласования, который при превышении некоторого порогового значения воздействует на блок 13 управления. В результате чего
с выходов блока 13 управления начинают поступать Импульсы опроса Uonp с частотой опР элементы И 14, 15 и импульсы Цуэ с частотой гу9 на вход управляющего элемента 8, а с счетчика 12 снимается запрет на счет. Последующую работу устройства можно разбить на три эта1га по времени, отличающиеся частотой опроса реверсивного счетчика 7 (и слейоёательно частотой его обнуления) и степенью подключения элементов цифрового фильтра 1О. На первом этапе опрос реверсивного счетчика 7 ведется с частотой РОПЬ импульсами опроса с выхода блока 13 управления. На этом этапе устраняется рассогласование по фазе (задержке) между входной и опорной псевдослучайной видеопоследовательностями. На втором этапе опрос реверсивного счетчика 7 ведется с частотой onf импульсами опроса с выхода блока 13 управления , т.е. знак сигнала рассогласования поступает и в счетчик 12, при этом РОПЬ олЬ определяется максимальной допплеровской частотой, т.е. полосой захвата. На этом этапе в счетчике 12 накапливается информация о допплеровской частоте входлого сигнала. На третьем этапе опрос реверсивного счетчика 7 ведеся с частотой РОП|З импульсами опроса сГ выхода блока 13 управления и на счетный вход преобразователя 18 поступают импульсы с выхода блока 13 управления. При этом Ppno и определяется мак симальной скоростью изменения доппле- ровской частоты входного сигнала. На этом этапе, который $тляется этапом работы устройства в режиме слежения, используется накопленная на втором этапе информация о допплеровской частоте входного сигнала, что позволяет опрашивать
реверсивный счетчик 7 не с частотой otib I которая определяется необходимой полосой захвата, -а с меньшей частотой. Так как шумовая полоса устройства пропорциональна частоте опроса, то уменьшение частот опроса повышает помехо-.. устойчивость устройства.
Таким образом, использование в устройстве слежения за .задержкой цифрового фильтра 10, параметры которого изменяются блоком 13 управления в соответствии с режимом работы ус,тройства, позволяет без увеличения времени установления и без уменьшения полосы захвата повысить помехоустойчивость устройства в режиме слежения (увеличивает среднее время до срыва слежения).
Фо р м у ла изобретения
Цифровое устройство слежения за задержкой по авт. св. Ng 467489, от-, личающееся тем, что, с целью повышения помехоустойчивости, введен цифровой фильтр при этом выходы сложения и вычитания реверсивного счетчика через цифровой фильтр подключены к двум соответствуклцим входам управляющего элемента, дополнительные выходы которого подключены к входам вычитайия и сложения цифрового фильтра, соответствующий выход которого подключен к дополнительному входу управляющего элемента , при этом выход делителя подключен к первому управляющему входу цифрового фильтра, выход обнуления и второй управляющий вход которого соединены соответственно с дополнительными входом и выходом реверсивного счетчика.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пропорционально-интегральныйРЕгуляТОР | 1979 |
|
SU832528A1 |
| Цифровое устройство слежения за задержкой | 1973 |
|
SU467489A1 |
| Цифровое устройство слежения за задержкой псевдослучайной последовательности | 1983 |
|
SU1088146A1 |
| Аналого-цифровой интегратор | 1982 |
|
SU1037280A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| Преобразователь перемещения в код | 1986 |
|
SU1410272A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 1997 |
|
RU2110890C1 |
| Устройство синхронизации в одночастотных многоканальных адресных системах с временным разделением каналов | 1989 |
|
SU1811018A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |