(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
| Устройство для контроля параметров синусно-косинусного вращающегося трансформатора | 1989 |
|
SU1720128A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Устройство для контроля системы управления | 1981 |
|
SU1003029A2 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Регулирующее устройство с релейной характеристикой | 1980 |
|
SU881662A1 |
| Система автоматического управления потенциально опасным объектом | 1981 |
|
SU970314A1 |
| Цифровой следящий привод | 1980 |
|
SU930247A1 |
| Следящее устройство для бесконтактного измерения параметров углового движения объекта | 1988 |
|
SU1562702A1 |
1
Изобретение относится к области управления и регулирования и может быть применено для автоматического контроля переменной величины.
Известно устройство дляуправления следящим приводом, позволяющее уменьшить ошибки следящих систем, в которых для управления следящим приводом используются функциональные преобразователи с кусочно-линейной аппроксимацией функции квадратного корня от сигнала ошибки ij.
Наиболее близким по тexн iчecкoй сущности к предложенному изобретению является устройство для контроля параметров, содержащее датчик контролируемого параметра, первый блок сравнения, предварительный усилитель, сумматор, . соединенный одним из cectr.x входов с выходом генератора периодического сигнала, усилитель мощности, исполнительный двигатель и редуктор, соединенный с индикатором. Выход редуктора через измерительный блок соединен также со
вторым входом блока сравнения, а выхо предварительного усилителя через нульорган и формирователь - со нходом опроса индикатора 2.
Это устройство позволяет устранить влияние ца точность контроля norpeuj- ностей, обусловленных действием нелинейностей в следящей системе, возмущениями, действующими на исполнительный двигатель, и динамической погрешностью следящей системы.
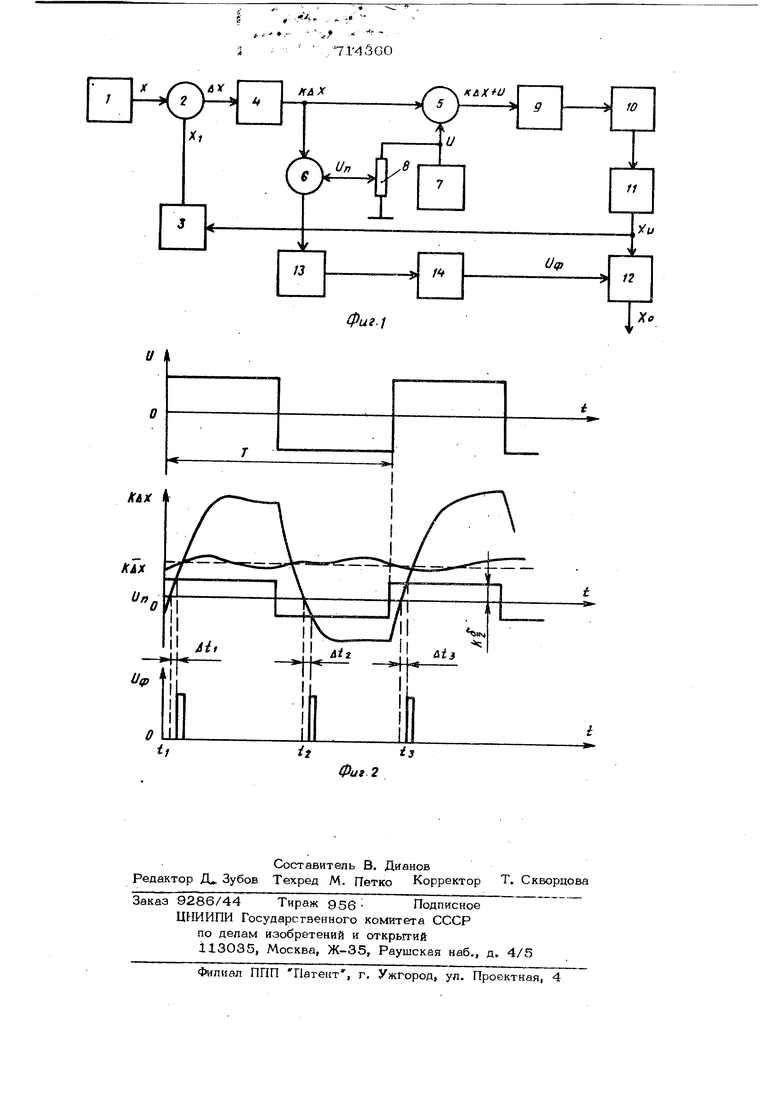
Однако известное устройство не позволяет устранить влияние на точность контроля погрешностей измерительных элементов следящей системы, к которым относятся блок сравнения, осуществляющий сравнение входной и выяодной величины следящей системы, и измерительный блок, измеряющий выходную величину следящей системы и преобразующий ее в пропорциональную ей величину, подаваемую на блок сравнения, а также погрешностей индикатора, под слючаемого к выходу следяпшй системы. &т-яиио погррилюслей la awiiiHbix эло ментов следящей системы н индикатора проявляется, в частности, в вариации отсчеачлз контролируемой величины. Цель изобретения - повышение точно ти контроля с помошью следящей системы, путем устранения ошибок, вызванных вариацией отсчетов конт{}олируемой величины. Эта цель достигается тем, что в уст ройство для контроля параметров введены последовательно соединенные регулятор амплитуды, подключенный к генератору периодического сигнала, и второй блок сравнения, второй нход и выход которого соединены соответственно с выходом предварительного усилителя и со входом нуль-органа. Это позволяет, изменяя с помощью р гулятора амплитуду сигнала, подаваемого на ахо1 второго блока сравнения, устранить вариацию отсчетов контролируемой величины, снимаемой с индикато ра при неизменном ее значении и обеспе чить за счет этого повышение точности контроля. Сущность изобретения поясняется чер тежами, где на фиг. 1 приведена блок.схема предлагаемого устройства; на фиг. 2 - диаграммы, поясняющие процес посредством которого устраняется ошиб. ка, вызываемая вариацией отсчетов квнтролируемрй величины. Устройство содержит датчик контроли руемого параметра 1, соединенный со входом первого блока сравнения 2, другой вход которого соединен с выходом измерительного блока 3. Выход блока 2 через предварительный усилитель 4 соединен со входом сумматора 5 и со ахо- дом второго блока сравнения 6. Второй вход сумматора 5 соединен с вьпсодом генератора 7 периодического сигнала. Выход генератора 7 соединен также через регулятор амплитуды 8 со вторым входом блока 6. Выход сумматора 5 через усилитель мощности 9, исполнительный -двигатель 10 и редуктор 11 соединен с индикатором 12 (контролируемого параметра) и входом блока 3. Выход блока 6 через нуль-орган 13 и формирователь импульсов 14 соединен с индикатором 12. Устройство работаег следующим образом. Контролируемая переменная величина X, поступающая с датчика 1 и равная значению контролируемо1о плр;|метO ра 4 С1;р.внивается в 6,;окр 2 с ВРЛИЧЧНОЙ Х, ПрОПОрЦИОНГШЫ.) КООрДИ1 аге X V) входа индикатора 12. Гезультат сравнения дх , равный р.озности Xj-х , усиливается в К раз усилителем 4 и подается на вход сумматора 5 и блока 6. В сумматоре 5 усиленный сигнал рассогласования Клч слодяшой системы суммируется с дополнительным периодическим сигналом и , поступающим на другой вход сумматора 5 с генератора 7, npv;чем сигнал U описывается функцией U ( i; ) (см. фиг. 2), определяемой равенствамиУ-Д при. п и--Апри иТч- -t (H-vDT, А амплитуда сигнала генератора 7; нуль или любое число натурального ряда Т - период. Период Т выбирают таким, чтобы частота F: - была ниже границы Ру,р полосы пропускания следящего привода. При соблюдении условий F Fpp cy -l;мapный сигнал К воздействует через усилитель 9, двигатель 10 и редуктор 11; на вход индикатора 12 и вход блока 3, в результате чего величина X,, , поступаю-г шая на вход блока 2, совершает колебания вокруг некоторого ее среднего значения Х . Среднее за период Т значение Х , при работе следяплей системы отличается от среднего значения х контролируемой величины за тот же период, поэто -ду среднее значение сигнала рассогласоваьиш ДХ отлично от нуля, за счет чего обеспечивается отработка следящим приводом изменений контролируемого параметра. Амплитуда А сигнала U должна быть выбрана такой, чтобы амплитуда колебаний величины Х иравная ей амплитуда колебаний сигнала рассогласования ЛХ была больше среднего значения сигнала рассогласования ЛХ , за счет чего дважды за период Т (в момент времени i: , 2. -3 Т-Д-) сигнал рассогласования дХ следящей системы, а следовательно, и К&.) УАет проходить чераз нулевое ЗЕШчечие (см. фиг. 2). В случае, если напряжение Up , подаваемое с регулятора 8 на блок О, равно нулю, то срабатываЕше нуль-орглна 13 и отсчет контрюлируемого параметра X 6vдрл- происходить в момент, KOI л ; ДХ-К 57 , При этом, HanpHNf p, за смог в индикаторе 12 будет наблюдаться BojJV-ация d отсчетов контролируемого параметра, т.е. расхождение на вопичику ( сЗтсчетоБ при одноь и том же его зна чении. Вариация контролируемого параметра вызывает при периодическом изменении знака рассогпасования следящей системы ошибку гистеризованного .характера, равную О/2- , т.е. когда сиг пал рассогласования, увеличиваясь и меняя свой знак с минуса не плюс, в мо-лент времени Ьх) , становится равным нулю, то с индикатора 12 отсчитывается значение параметра с погрешностью ми- нус d/2CXo -X ), а в момент i2 с погрешностью плюс с /2{Хо2 /2 к аналогичным образом в последующие моменты времени by, j t4 Для устраненияошибок, вызванных вариацией и отсчетовконтролируемой величины, ставят движок регулятора 8 так, чтобы вариация отсчетов отсутствовала. Дня этого задают на входе следящей системы постоянное (например, нуле вое) значение контролируемой величины X и, изменяя положение движка, добиваются того, чтобы отсчеты, снимаемые с индикатора 12, постоянно соответствовали заданной величине 5 . В этом случае при работе системы напряжение U , подаваемое в момент времени -fc (см. фиг. 2) с регулятора 8 на блок, 6, будет равно Ktf/S а отсчет контролируемой величины будет производиться уже не в момент времени fcj , S в момент времени-Ь,..fci когда напряжение на выходе блока 6, определяемое разностью КЛ%-У -k&x-кЭ/г , равно нулю, причем рассогласование следящей системы Д X положительно и равно f/2, . Таким образом,отсчет контролируемой величины будет произведен лишь тогда, когда показания индикатора 12 увеличатся, скомпенсировав отрицательную погрешность, вызванную вариацией. Аналогичным образом в момент времени tr., за счет того, что и,, -КсГ/2 будет снят отсчет при , вследст о6 вкс чего скомпенсируется положительная norpeujHocTb, вызванная вариацией..Таким образом, при фиксации значений контролируемого параметра в момен- ты времени, ,. т. д., когда уровень сигнала рассогласования становится рйвным соответственно Ц(J/2-КсГ)2и т.д., отсчеты контролируемого параметра будут соответствовать точным его значениям в моменты времени соответственно fe,-t2 и т. Д., Достоинством предлагаемого устройства по сравнению с прототипом, является устранение ошибок, вызванных вариацией отсчетов, снимаемых с индикатора контролируемой величины, что во многих практически.х случаях позволит существенно повысить точность контроля с помощью следящей системы, Формула изобретения Устройство для контроля параметров, содержащее последовательно соединенные датчик контролируемого параметра, первый блок сравнения, предварительный усилитель, сумматор, подключенный к ге нератору периодического сигнала, усилитель мощности, исполнительный двигатель, редуктор, подсоединенный к индикатору, и измерительный блок, выход которого подключен ко второму входу первого блока сравнения, а один из входов индикатора соединен с выходом нуль-органа через формирователь импульсов, о тличающееся тем, что, с целью повышения точности устройства, в него введены последовательно соединенные регулятор амплитуды, подключенный к генератору периодического сигнала, и второй блок сравнения, второй аход и выход которого соединены соответственно с выходом предварительного усилителя и со аходом нуль-органа. Исгочники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 230243, кл. G05 В 23/ОО, 1966. 2.Авторское свидетельство СССР № 457075, кл, GO5 В 23/ОО, 1974 (протртип).
I,:.л. . . . ,..., ;i : -
iti3
il
фиг.}
Фиг 2
