Изобретение относится к робототех нике и может быть использовано при создании aflantHBHbix роботов, функционирующих в среде с ограниченной возможностью.
Цель изобретения - повьшение быстродействия устройства за счет одновременной блокировки всех ключевых элементов формирователя траектории перемещения, соответствующих тем положениям робота, в которых возможны его касания с данной точкой препятствия .
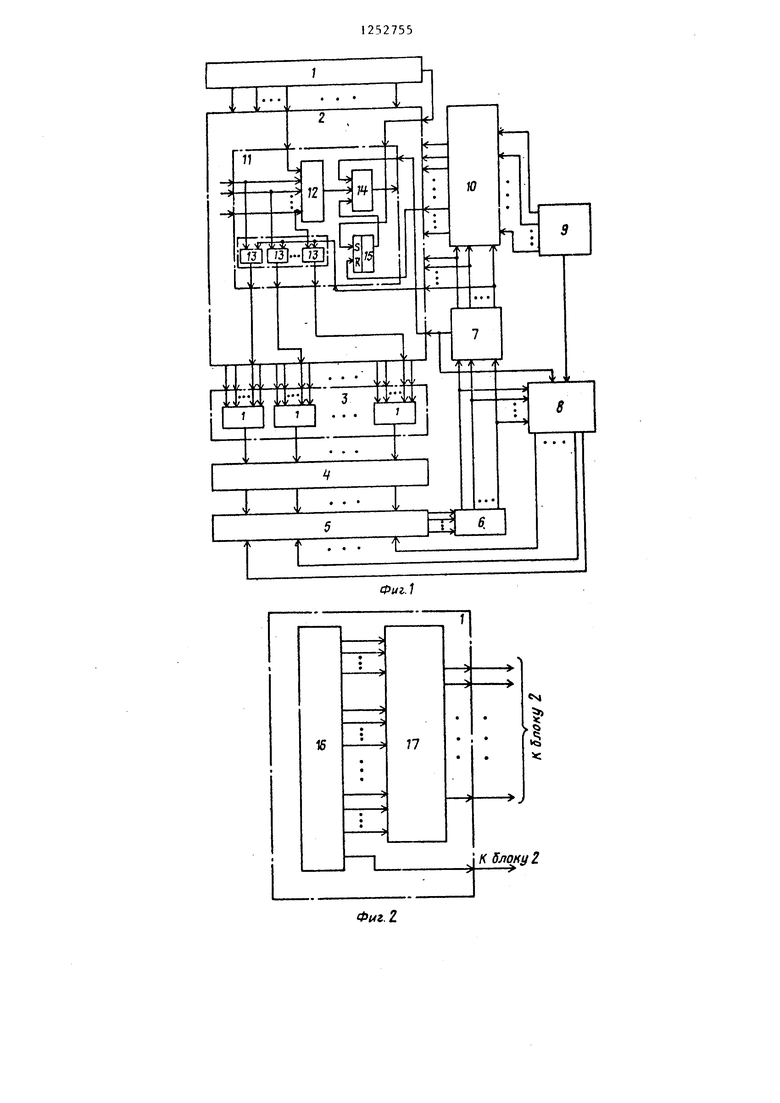
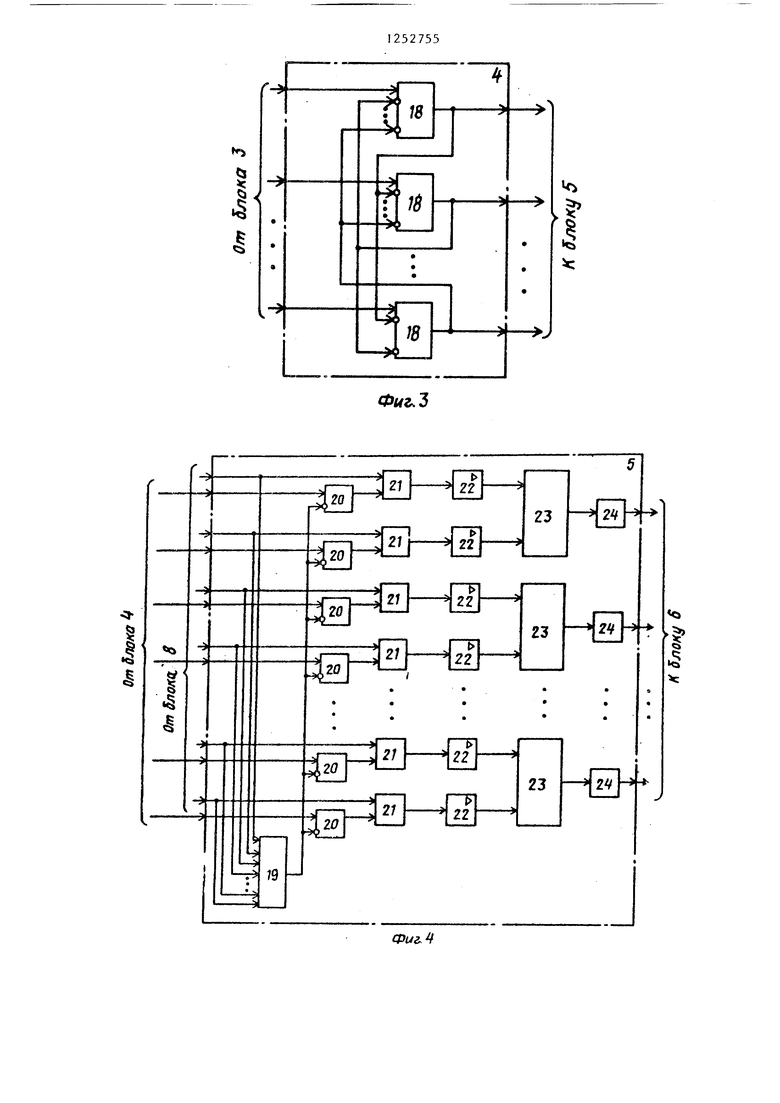
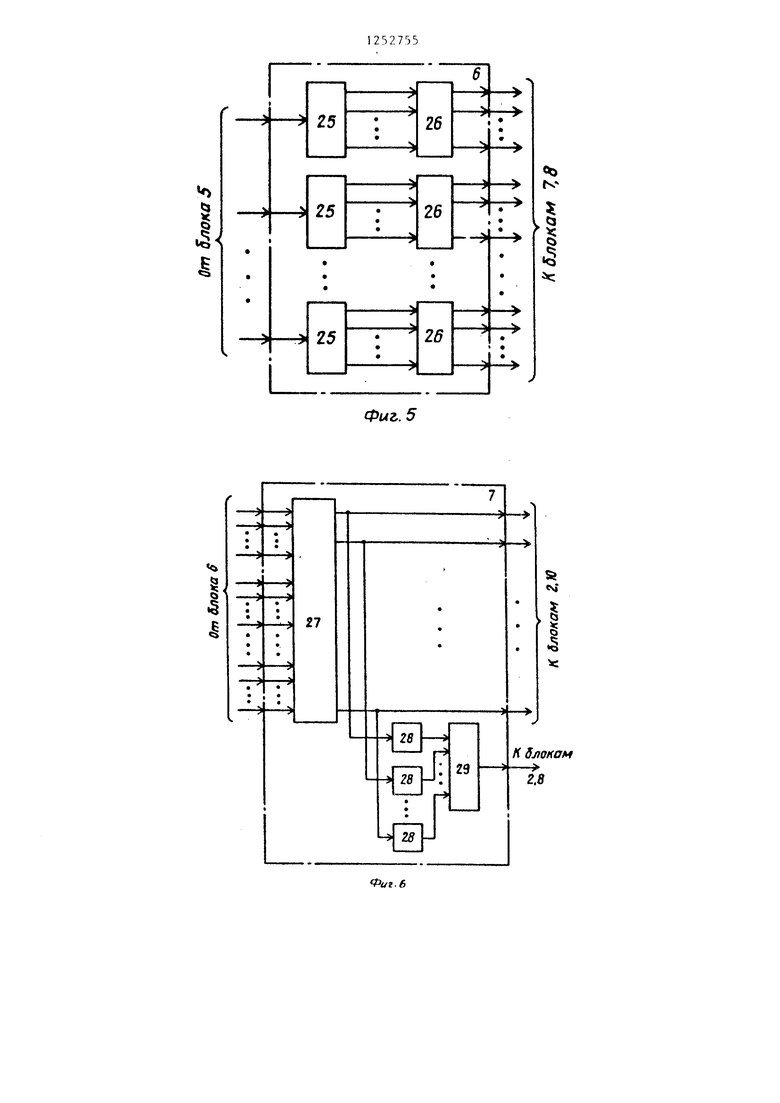
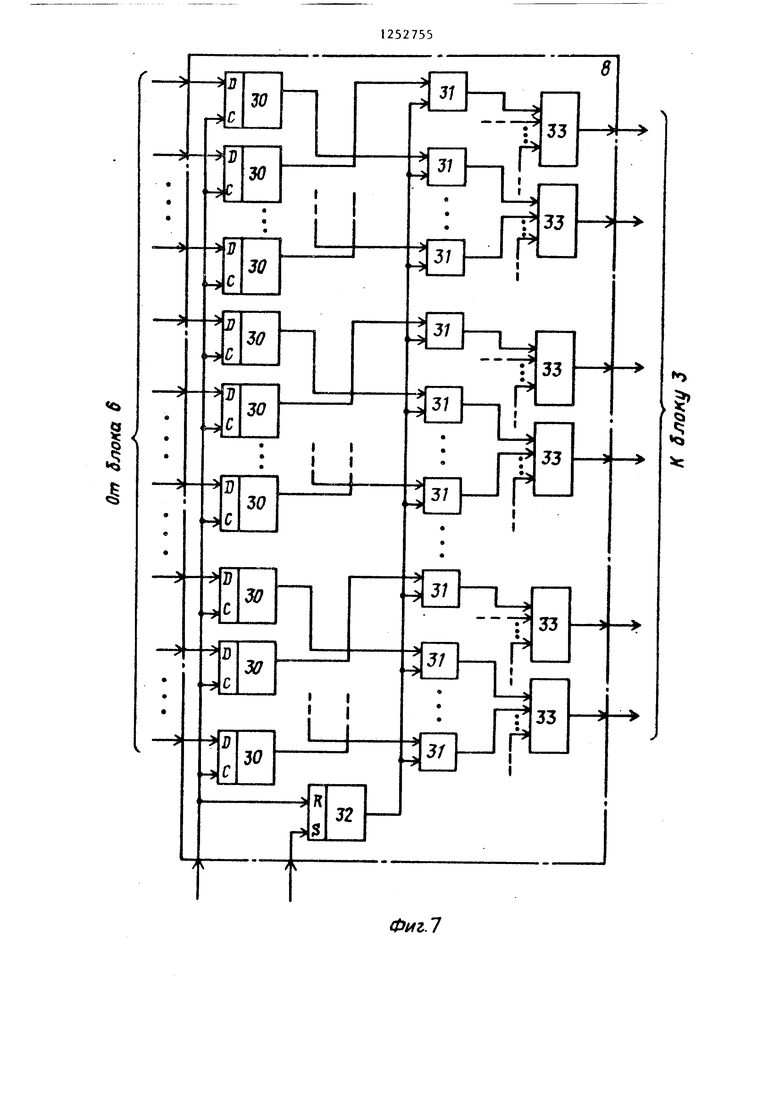
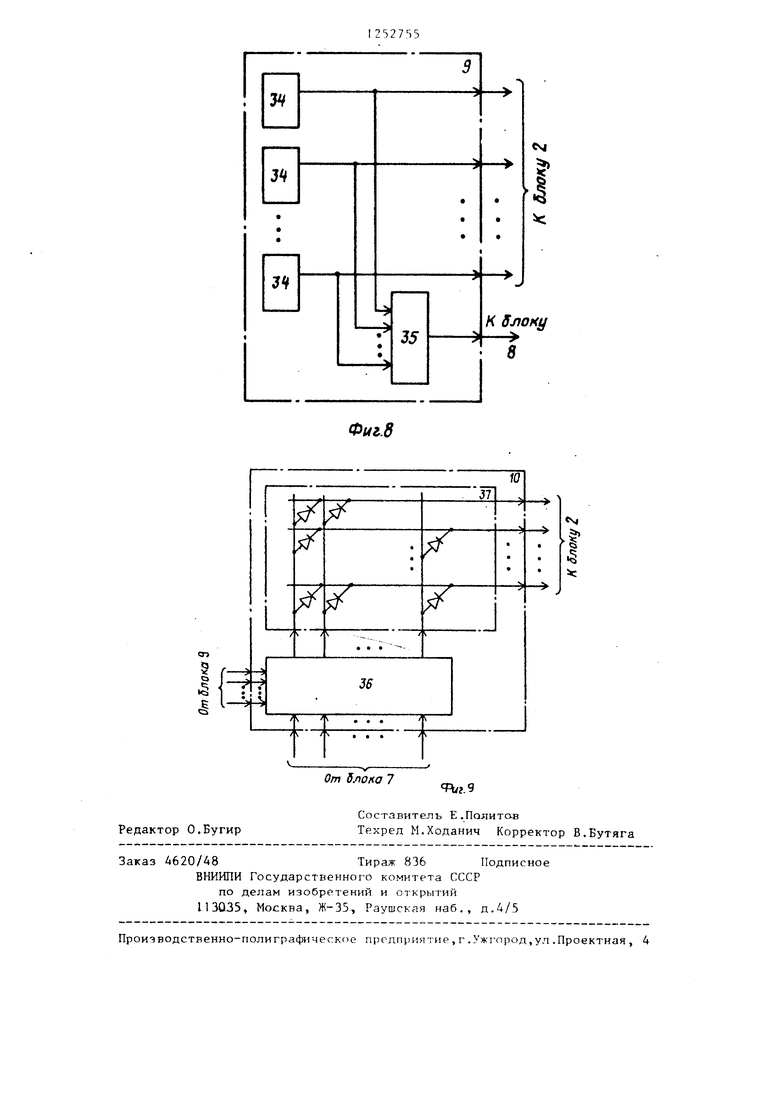
На фиг. представлена функционапь ная схема предлагаемого устройства; на фиг.2 - схема задатчика целей; на 4нг.З - схема многостабильного триггера; на фиг.4 - схема блока приводов; на фиг.5 - схема блока датчиков положений; на фиг.6 - схема дешифратора положения; на фиг.7 - схема блока возврата в предыдущее положение; на фиг. 8 - схема блока тактильных датчиков; на фиг. 9 - схема формирователя модели внешней среды.
Устройство содержит задатчик 1 целей, формирователь 2 траектории перемещения, блок 3 элементов ИЛИ, мно рстабильный триггер 4, блок 5 приводов, блок 6 датчиков положения дешифратор 7 положения, блок 8 возврата в предыдущее положение, блок 9 тактильных датчиков, формирователь 10 модели внешней среды, ключевые элементы 1, первый элемент ИЛИ 12, первые элементы И 13, второй элемент И 14, первый триггер 15 (фиг.1) блок 16 переключателей, первый дешифратор 17 (фиг.2), третьи элементы И 18 (фиг.З), второй элемент ИЛИ 19, четвертые элементы И 20, третьи иэлементы ШШ 21, усилители 22, серводвигатели 23, потенциомет- рические датчики 24 (фиг.4), аналого цифровые преобразователи 25, вторые дешифраторы 26 (фиг.З), третий дешифратор 27, дифференцируюш е элементы 28, четвертый элемент ИЛИ 29 (фиг.6), вторые триггеры 30, четвер- тые элементы И 31, третий триггер 32, четвертые элементы ИЛИ 33 (фиг.7 тактильные датчики 34, пятый элемент ИЛИ 35 (фиг.8), матричный дешифратор 36, матричный коммутатор 37 (фиг.9).
Устройство работает следующим образом.
Перед началом работы на втором выходе задатчика 1 целей появляется
кратковременный сигнал, который поступает на пятые входы всех ключевых элементов 11 и устанавливает триггеры 15 ключевых элементов 11 в единичное состояние. Перед выполнением каждого элементарного акта движения на втором выходе дешифратора 7 положения появляется кратковременный запрещающий сигнал, который поступает на третьи входы элементов И 14 всех ключевых элементов 11 и блокирует их.
Ключевой элемент 11, соответствующий конечному целевому положению робота, выделяется задатчиком 1 целей. При этом последний формирует на информационном входе ключевого элемента II единичный сигнал, в результате чего данный ключевой элемент 1 I становится генератором сигнала возбуждения , который поступает на входы соседних ключевых элементов 1I после снятия общего запрещающего сигнала с второго выхода дешифратора 7 положения .
Дешифратор 7 положения формирует на основании информации, поступающей от блока 6 датчиков положения, единичный сигнал на входе того ключевого элемента I1, который соответствует текущему положению робота. При этом элементы И 13 данного ключевого элемента 11 открываются и пропускают сигналы, поступаюш 1е на шестые входы данного ключевого элемента 11, через соответствующие элементы ИЛИ блока 3 на входы многостабильного триггера 4. I
Такая организация формирователя
2 приводит к тому, что посл е окончания общего запрещающего сигнала ключевой элемент 11, соответствующий конечному положе тю робота, начинает передавать сигнал возбуждения на входы соседних ключевых эле ментов II, который, распространяясь по ключевым элементам I1, достигает входов ключевого элемента 11, соответствующего текущему положению робота. Очевидно, что первым на одном из входов этого ключевого элемента 11 появляется тот сигнал, который прошел по кратчайшему пути от генерирующего ключевого элемента 11. ,. Пройдя через один из элементов И 13 ключевого элемента 11. Пройдя через один из элементов И 13 ключевого элемента 11 , соответствующего текущему положению робота, и соответствующий
элемент ИПИ блока 3, этот сигнал ус- таиалливает многостабильный триггер 4 в состояние, соответствующее направлению, со стороны которого прошел первый сигнал возбуждения. После- дующие сигналы, проходящие на другие входы многостабильного триггера 4 не П.О кратчайшему пути, состояния многостабильного триггера 4 не изменяют.
Таким образом, путь первого сиг- нала является воспроизводимой в блоке 2 моделью кратчайшего пути от тег кущего положения работа к конечному. Фиксация Первого сигнала соответствует акту принятия решения, заключаю- 5 нее запомненной информации о текущем
щегося в выборе того направления, в котором нужно совершать перемещения роботу с тем, чтобы по кратчайшему пути достичь конечного целевого поло жения. Состояние многостабильного триггера 4 сохраняется до тех пор, пока приводы блока 5 не отработают элементарного шага движения. Окончание элементарного шага движения фиксируется блоком 6 датчиков положения При этом информация о текущем положении робота от блока 6 датчиков положения запоминается в блоке 8 возврата в предыдущее положение, а деположении работы сигналы, которые, поступая на блок 5 приводов, возвращают робот Е предыдущее положение. Окончание отработки элементарного
20 шага возврата также фиксируется блоком 6 датчиков положения и, следовательно, дешифратором 7 положения, который вырабатывает запрещающий CHI нал на своем втором выходе и тем
25 самым прекращает работу блока 8 возврата в предьщущее положение.
После этого процед фа моделирования кратчайшего пути, выделения первого шага и отработки его блоком 5
шифратор 7 положения выбирает следую- приводов возобновляется, но уже при
условии, что ключевые элементы 11, соответствующие положениям робота, в которых он соприкасается с данной точкой препятствия, заблокированы и не участвуют в процессе моделировани кратчайшего пути.
ший ключевой элемент 11, соответствующий новому текущему положению робота, и вырабатывает кратковременный запрещающий сигнал на своем выходе, тем самым блокируя всю сеть. При это многостабильный триггер 4 возвращается в исходное состояние и все описанные операции повторяются до тех пор, пока робот не достигает конечно ного положения.
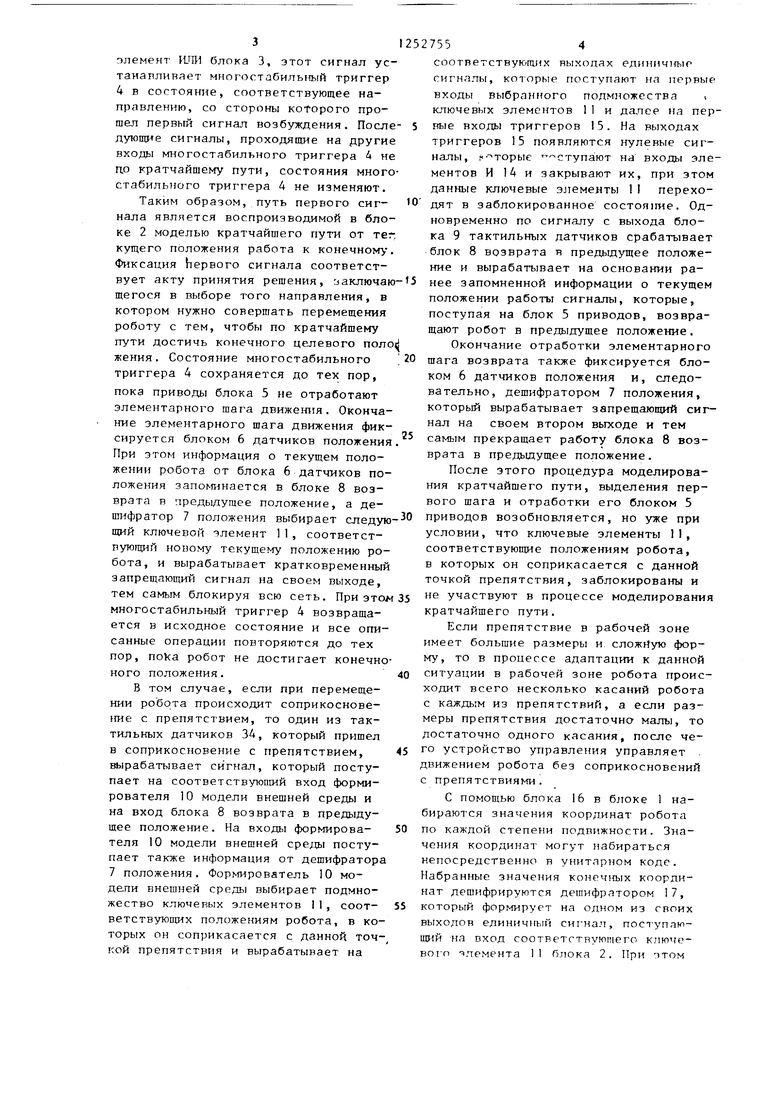
В том случае, если при перемещении ро бота происходит соприкосновение с препятствием, то один из тактильных датчиков 34, который пришел в соприкосновение с препятствием, вырабатывает сигнал, который поступает на соответствуюпшй вход формирователя 10 модели внешней среды и на вход блока 8 возврата в предыдущее положение. На входы формирова- теля 10 модели внешней среды поступает также информация от дешифратора 7 положения. Формирователь 10 мо- дапи внешней среды выбирает подмножество ключевых элементов I1, соот- ветствуюшкх положениям робота, в которых он соприкасается с данной точкой препятствия и вырабатывает на
соответствуюгдих выходах единичнъ1г сигналы, которые поступают на первые входы выбранного подмножества i ключевых элементов 1 1 и да,псе на первые входы триггеров 15. На выходах триггеров 15 появляются нулевые сигналы, ; - торые ступают на входы элементов И 14 и закрывают их, при этом данные ключевые элемеиты 11 переходят в заблокированное состояние. Одновременно по сигналу с выхода блока 9 тактильных датчиков срабатывает блок 8 возврата в предыдущее положение и вырабатывает на основании раположении работы сигналы, которые, поступая на блок 5 приводов, возвращают робот Е предыдущее положение. Окончание отработки элементарного
шага возврата также фиксируется блоком 6 датчиков положения и, следовательно, дешифратором 7 положения, который вырабатывает запрещающий CHI- нал на своем втором выходе и тем
самым прекращает работу блока 8 возврата в предьщущее положение.
После этого процед фа моделирования кратчайшего пути, выделения первого шага и отработки его блоком 5
приводов возобновляется, но уже при
условии, что ключевые элементы 11, соответствующие положениям робота, в которых он соприкасается с данной точкой препятствия, заблокированы и не участвуют в процессе моделировани кратчайшего пути.
Если препятствие в рабочей зоне имеет большие размеры и сложную форму , то в процессе адаптации к данной ситуации в рабочей зоне робота происходит всего несколько касаний робота с калдым из препятствий, а если размеры препятствия достаточна малы, то достаточно одного касания, после чего устройство управления управляет . движением робота без соприкосновений с препятствиями.
С помощью блока 16 в блоке 1 набираются значения координат робота по каждой степени подвижности. Значения координат могут } абираться непосредственно в унитарном коде. Набранные значения конечных координат дешифрируются дешифратором 17, который формирует на одном из своих выходов единичный сигнал, поступаю- на вход соответстиующего ключевого элемента 11 блока 2. При :)том
S
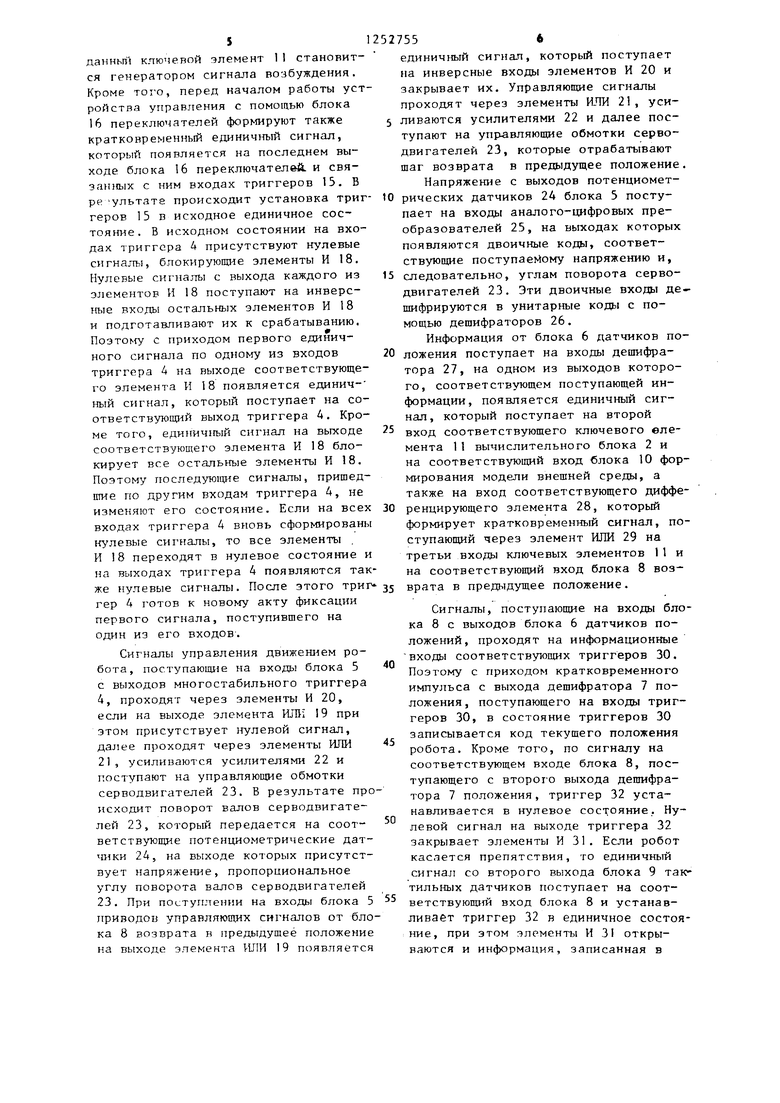
данньп ключевой элемент 1 1 становится генератором сигнала возбуждения. Кроме того, перед началом работы устройства управления с помощью блока 16 переключателей формируют также кратковременный единичный сигнал, который появляется на последнем выходе блока 16 переключателей, и связанных с ним входах триггеров 15. В ре -ультате происходит установка триггеров 15 в исходное единичное состояние. В исходном состоянии на входах триггера 4 присутствуют нулевые сигналы, блокирующие элементы И 18. Нулевые сигналы с выхода каждого из элементов И 18 поступают на инверсные входы остальных элементов И 18 и подготавливают их к срабатыванию. Поэтоьгу с приходом первого единичного сигнала по одному из входов триггера А на выходе соответствующего элемента И 18 появляется единич- ный сигнал, который поступает на соответствующий выход триггера Д. Кроме того, единичный сигнал на выходе соответствующего элемента И 18 блокирует все Остальные элементы И 18, Поэтому последующие сигналы, пришедшие по другим входам триггера 4, не изменяют его состояние. Если на всех входах триггера А вновь сформированы нулевые сигналы, то все элементы И 18 переходят в нулевое состояние и на вь ходах триггера 4 появляются также нулевые сигналы. После этого триг гер А готов к новому акту фиксации первого сигнала, поступившего на один из его ВХОДОВ .
Сигналы управления движением робота, поступающие на входы блока 5 с выходов многостабильного триггера 4, проходят через элементы И 20, если на выходе элемента ШП; 19 при этом присутствует нулевой сигнал, далее проходят через элементы ИЛИ 21, усиливаются усилителями 22 и поступают на управляющие обмотки серводвигателей 23. В результате происходит поворот валов серводвигателей 23, который передается на соответствующие потенциометрические датчики 24, на выходе которых присутствует напряжение, пропорциональное углу поворота валов серводвигателей 23. При поступлении на входы блока 5 приводов управляющих сигналов от блока 8 возврата в предыдущее положение на выходе элемента 19 появляется
527556
единич№гй сигнал, который поступает на инверсные входы элементов И 20 и закрывает их. Управляющие сигналы проходят через элементы ИЛИ 21, уси- 5 ливаются усилителями 22 и далее поступают на управляющие обмотки серводвигателей 23, которые отрабатывают шаг возврата в предыдущее положение. Напряжение с выходов потенциометtO рических датчиков 2А блока 5 поступает на входы аналого-цифровых преобразователей 25, на выходах которых появляются двоичнь1е коды, соответствующие поступаеМому напряжению и,
15 следовательно, углам поворота серводвигателей 23. Эти двоичные входы да- щифрируются в унитарные коды с помощью дешифраторов 26.
Информация от блока 6 датчиков по20 ложения поступает на входы дешифратора 27, на одном из выходов которого, соответствующем поступающей информации, появляется единичный сигнал, который поступает на второй
5
вход соответствующего ключевого елемента 1I вычислительного блока 2 и на соответствующий вход блока 10 формирования модели внешней среды, а также на вход соответствующего дифференцирующего элемента 28, который
формирует кратковременный сигнал, поступающий через элемент ИЛИ 29 на третьи входы ключевых элементов 11 и на соответствующий вход блока 8 возврата в предыдущее положение.
Сигналы, поступающие на входы блока 8 с выходов блока 6 датчиков положений, проходят на информационные ВХОДЫ соответствующих триггеров 30. Поэтому с приходом кратковременного импульса с выхода дешифратора 7 положения, поступающего на входы триггеров 30, в состояние триггеров 30 записывается код текущего положения робота. Кроме того, по сигналу на соответствующем входе блока 8, поступающего с второго выхода дешифратора 7 положения, триггер 32 устанавливается в нулевое состояние. Нулевой сигнал на выходе триггера 32 закрывает элементы И 31. Если робот касается препятствия, то единичный сигна:т со второго выхода блока 9 тактильных датчиков поступает на соот
ветствующий вход блока 8 и устанавливает триггер 32 в единичное состояние, при этом элементы И 31 открываются и информация, записанная в
триггерах 30, проходит на выходы элементов И 31 и через соответствующие элементы ИЛИ 33 на выходы блока 8 и далее на соответствующие входы блока 5 приводов. При этом на выходах блока 8 формируется код направления движения робота, обратный записанному в триггерах 30.
При соприкосновении подвижной части робо та, на которой расположены тактильные датчики 34, с препятствием на выходе одного из тактильных датчиков 34 появляется единичный сигнал, KdTOpbrfi поступает на соответствующий вход формирователя 10 модели внешней средь и через элемент ИЛИ 35 на соответствующий вход бло- ка 8 возврата в предыдущее положение
На входы матричного дешифратора 36 поступает информация от дешифратора 7 положения и блока 9 тактильных датчиков. В зависимости от этой информации на одном из выходов дешифратора 36 появляется единичный сигнал, который поступает на соответствующий вход коммутатора 37, на соответствующих выходах которого появляются единичные сигналы, поступающие на входы соответствующих ключевых элементов II блока 2, и переводят их в заблокированное состояние. Информация предварительно заносится - в коммутатор 37 на основании расчетных или экспериментальных данных.
Применение изобретения позволит обеспечить значительное сокращение времени адаптации робота, функционирующего в среде с ограниченной видимостью, к ситуации в рабочей зоне.
Формула изобретения
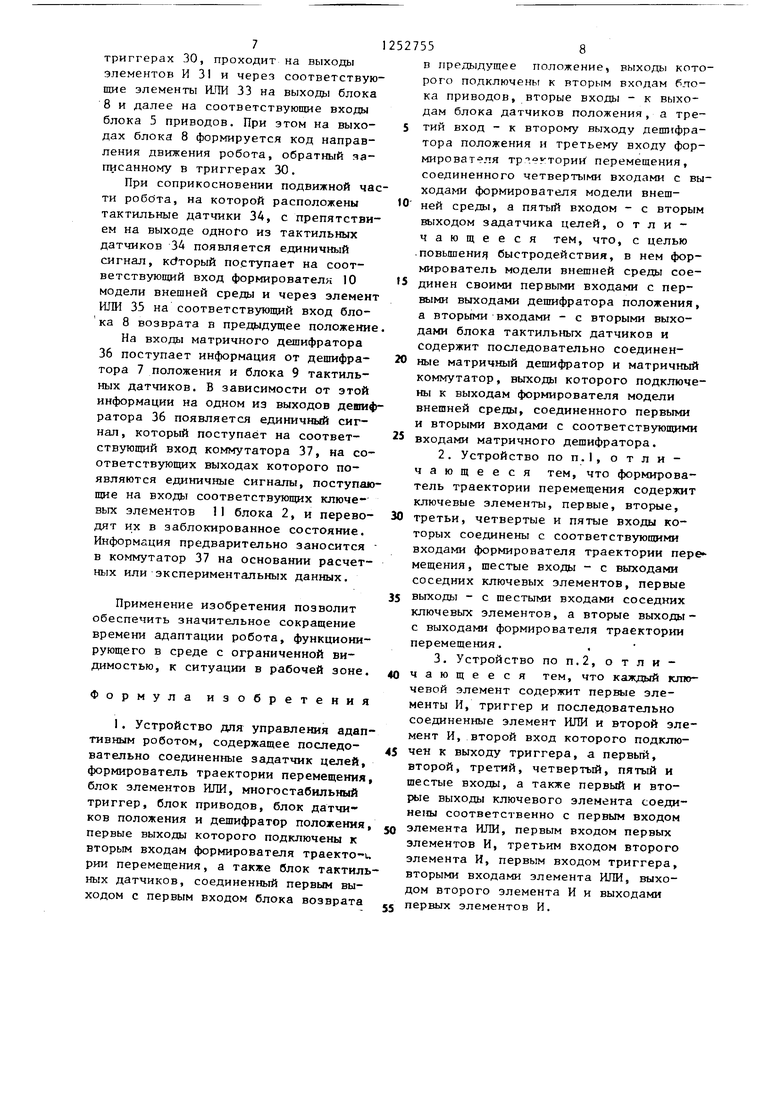
I. Устройство для управления адаптивным роботом, содержащее последовательно соединенные задатчик целей, формирователь траектории перемещения, блок элементов ИЛИ, многостабильный триггер, блок приводов, блок датчиков положения и дешифратор положения, первые выходы которого подключены к вторым входам формирователя траекто-и рии перемещения, а также блок тактильных датчиков, соединенный первым выходом с первым входом блока возврата
в предыдущее положение, выходы которого подключены к вторым входам блока приводов, вторые входы - к выходам блока датчиков положения, а тре- тий вход - к второму выходу деш1фра- тора положения и третьему входу формирователя TpieKTOpHH перемещения, соединенного четвертыми входами с выходами формирователя модели внещней среды, а пятый входом - с вторым выходом задатчика целей, отличающееся тем, что, с целью .повьшенич быстродействия, в нем формирователь модели внешней среды соединен своими первыми входами с первыми выходами дещифратора положения, а вторыми входами - с вторыми выходами блока тактильных датчиков и содержит последовательно соединенные матричный дещифратор и матричный коммутатор, выходы которого подключены к выходам формирователя модели внешней среды, соединенного первыми и вторыми входами с соответствующими
входами матричного дешифратора.
2.Устройство по п.1, о т л и - чающееся тем, что формирователь траектории перемещения содержит ключевые элементы, первые, вторые,
третьи, четвертые и пятые входы которых соединены с соответствующими входами формирователя траектории пере мещения, шестые входы - с выходами соседних ключевых элементов, первые
выходы - с щестыми входами соседних ключевых элементов, а вторые выходы- с выходами формирователя траектории перемещения.
3.Устройство по п.2, отличающееся тем, что каждый клю- чевой элемент содержит первые элементы И, триггер и последовательно соединенные элемент ИЛИ и второй элемент И, второй вход которого подключек к выходу триггера, а первый, второй, третий, четвертый, пятый и щестые входы, а также первый и вторые выходы ключевого элемента соединены соответственно с первым входом
элемента ИЛИ, первым входом первых элементов И, третьим входом второго элемента И, первым входом триггера, вторыми входами элемента ИЛИ, выходом второго элемента И и выходами
первых элементов И.
i
.Г
«о
ФигФиг,. 5
S
Фиг.1
Фиг.8
ег
§
о
i
От блока 7
Редактор О.Бугир
Заказ А620/А8Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб. , д.4/5
Проиэводственно-полиграфическс5е предприятие,г.Ужгород,ул.Проектная, 4
«м
г.9
Составитель Е.Политав
Техред М.Ходанич Корректор В.Бутяга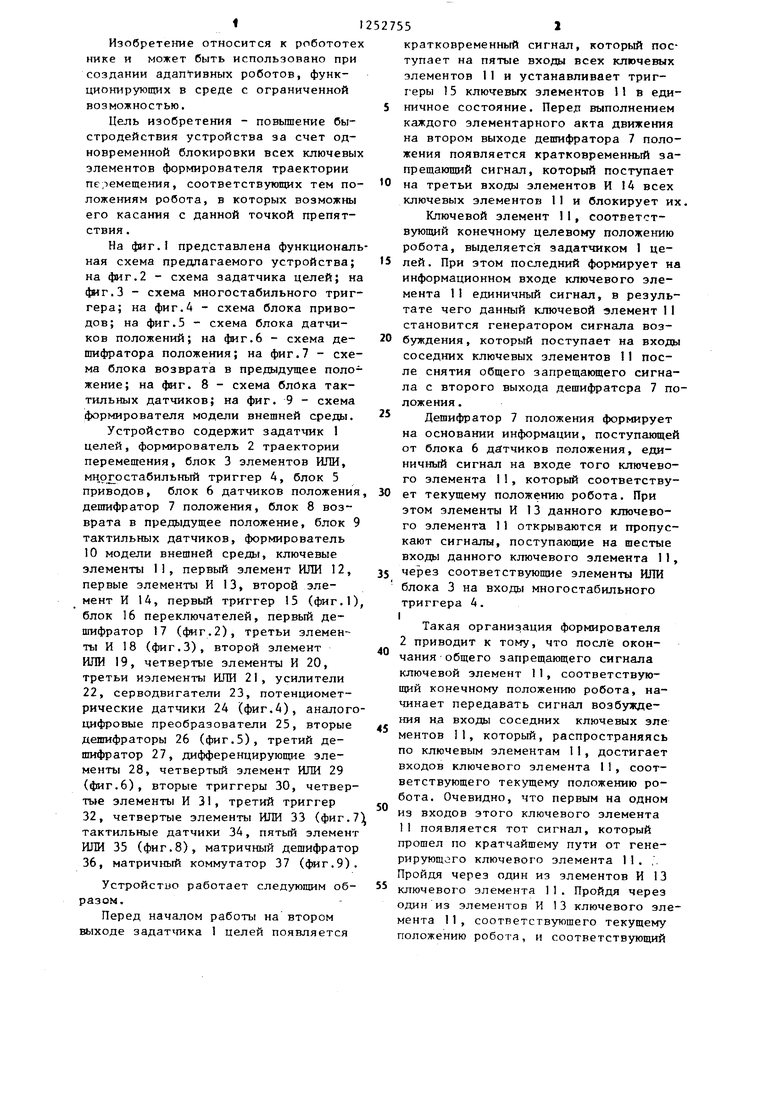
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом-манипулятором | 1985 |
|
SU1291388A1 |
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU849142A1 |
| Устройство для управления адаптив-НыМ РОбОТОМ-МАНипуляТОРОМ | 1979 |
|
SU812561A2 |
| Устройство для управления движением адаптивного транспортного робота | 1983 |
|
SU1138786A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство для определения крат-чАйшЕгО пуТи B гРАфЕ | 1979 |
|
SU842842A1 |
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ | 2002 |
|
RU2234147C2 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| Система управления гидравлическим прессом | 1983 |
|
SU1108020A1 |
Изобретение относится к области робототехники и может быть использовано при создании адаптивных роботов, функционирующих в среде с ограниченной видимостью. В устройстве за счет вьтолнения блока формирования модели внешней среды с помощью матричного дешифратора и матричного коммутатора, а ключевых элементов вычислительного блока с помощью триггера, элементов И и ИЛИ обеспечивается одновременная блокировка всех ключевых элементов вычислительного блока, соответствующих тем положениям робота, в которых возможны его касания с данной точкой препятствия, что повьшает быстродействие устройства. 2 з.п.ф-лы, 9 ил. с е hO ел vj ел ел
| Устройство для управления адаптив-НыМ РОбОТОМ-МАНипуляТОРОМ | 1979 |
|
SU812561A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU849142A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
