1 : , , Изобретение относится к робототехнике и может быть использовано при создании робототехнических систем различного назначения, в частности в сщаптивных poбoтax-мaнy пуляторах,обладающих свойствами искусственного интеллекта. По основному авт. с-. 716807 известно изобретение, содержащее следовательно соединенные блок сенсорных датчиков, блок формирования модели внешней среды и вычислительный блок и блок исполнительных устройств, выход которого подключен к соответствующему входу вычислительного блока, t-стабильный тригге входы которого соединены соответствующими выходами вычислительного блока, а выхода - с соответствующими входами блока исполнительных уст ройств. Кроме того, вычислительный блок устройства содержит матрицу ключевых элементов, причем первый и второй входы каждого ключевого эл мента соединены с соответствующими входами вычислительного блока, третий вход - со соответствующим выходом (I, J-1) .ключевого элемента, четвертый вход - с соответствукшдам выходом (1+1, J) ключевого элемента пятый вход - с соответствующим вы ходом (i+1, j) ключевого элемента, седьмой вход - с соответствунлцим выходом (i-1, j) ключевого элемента, а выход - с роответствующими входами (Г, J-1 ( (, J + O (-Ь J) и (i+1, j) ключевых элементов, а каждый ключевой элемент вычислительного блока содержит последовательно соединенные эле1лент ИЛИ и элемент И, второй вход которо;О подключен ко второму входу ключевого элемента, третий вход - к пятому входу ключевого элемент а, а выход - к выходу ключевого элемента, первый, второй, третий, четвертый и пятый входы элемента ИЛИ соединены с третьим, .седьмым, четвертым, шестым и первым входами ключевого элемента соответственнош. Данное устройство предназначено для управления транспортным средством, имеющим две степени свободы и функционирующим на плоскости и по этой причине не может быть непосредственно использовано для управления движением робота-манипулятора, в общем случае имеет более двух степеней свободы.
Цель изобретения - расширение функциональных возможностей устройств а.о
Поставленная цель достигается тем, что устройство содержит распределитель и последовательно соединенный блок датчиков положения и дешифратор, выходы КОТОРОГО подключены ко вторым входам вычислительного блока, выходы блока испол нительных устройств соединены со входами блока датчиков положения, а выходы вычислительного блока через распределитель подключены ко входам f-стабильного триггера.
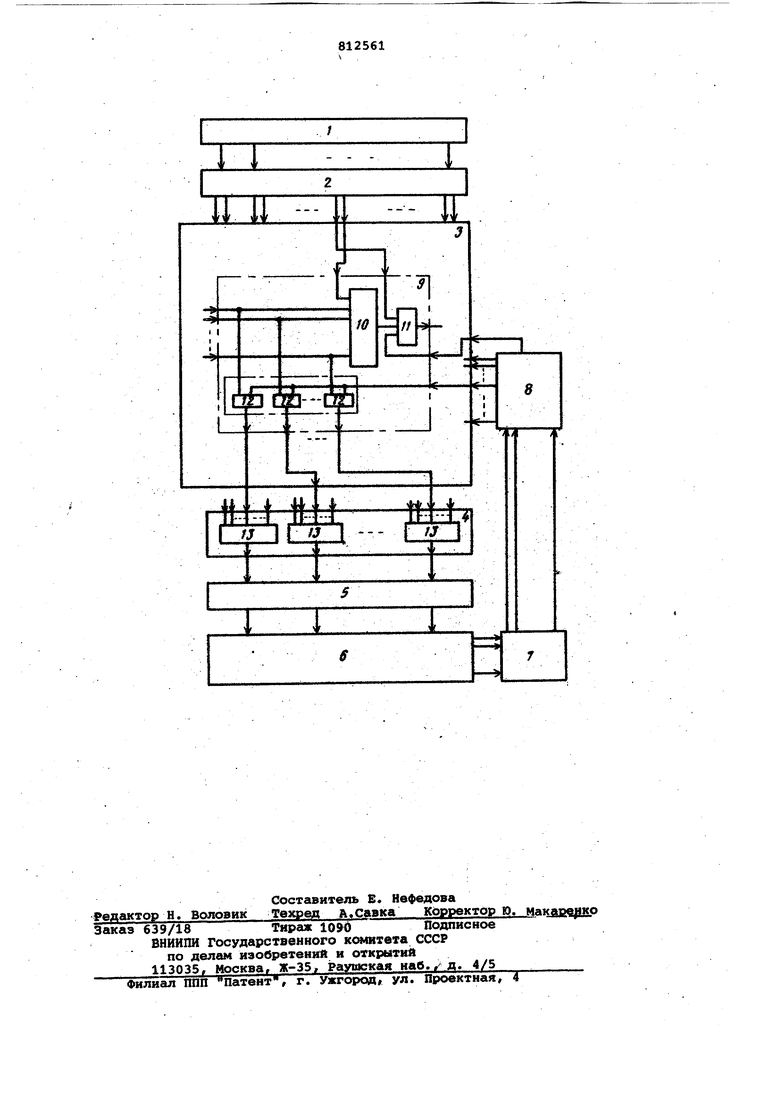
На чертеже -представлена функциональная схема устройства.
Устройство содержит блок 1 сенсорных датчиков, блок 2 формирования модели внешней среды, вычислительный блок 3, распределитель 4, -стабильный триггер 5,блок исполнительных устройств 6, блок датчиков положения 7, дешифратор 8, ключевые элементы 9. первые элементы ИЛИ 10, первые элементы И 11,вторые элементы И 12, вторые элементы ИЛИ 13.
Устройство управления работает следующим образом.
Перед началом выполнения каждого элементарного акта движения на выходе дешифратора появляется кратковременный запрещающий сигнал, который поступает на третьи входы первых элементов И 11 всех ключевых элементов 9 и блокирует их. В то же время на выходах блока 1 сенсорных датчиков присутствуют сигналы, характеризующие в каких участках рабочей зоны находятся препятствия. Блок 2 формирования модели внешней среда ставит в соответствии каждому участку рабочей зоны подмножество ключевых элементов 9 вычислительного блока 3, каждый ключевой элемент 9 которой соответствует некоторому положению манипулятора. Конфигурация подмножества ключевых элементо 9 блока 3, соответствующая некоторому участку рабочей зоны, зависит от координат ..этого участка, от кинемат ческой схемы манипулятора и физических размеров движущейся части манипулятора. Таким образом блок 2 формирования модели внешней среды выделяет подмножество -ключевых элементов 9 соответствующие положениям манипулятора, в которых он имеет общие точки с препятствиями, и формирует на информационных входах этих ключевых элементов 9 нулевые сигнал которые блокируют передачу логических, сигнало& возбужден.ия через эти ключевые элементы 9. Ключевые элементы 9, соответствующие конечным целевым положениям, выделяются блоком формирования модели внешней среды 2 в общем случае на основании.
информации поступаемой от блока 1 сенсорных датчиков, и в частном случае могут выделяться на основании информации предварительно занесенно в блок формирования модели внешней среды 2. При этом блок 2 формирует на информационном входе ключевого элемента 9, соответствующего конечному положению, единичный сигнал, в результате чего данный ключевой элемент становится генератором сигнала возбуждения, который поступает на логические входы t соседних ключевы элементов 9 после снятия общего запрещающего сигнала с выхода дешифратора 8. Дешифратор 8 формирует на оновании информации,полученной от блка датчиков положений 7, единичный сигнал на информационном входе того ключевого элемента 9, который соответствует текущему положению манипулятора. При этом вторые элементы И 12 данного ключевого элемента 9 открываются и тем самым пропускают единичные сигналы, поступающие на логические входы данного ключевого элемента 9, через соответствующие элементы ИЛИ 13 на входы f-стабильного триггера 5. Таким образом, ключевые элементы 9 вычислительного блока 3, соответствующие положениям в которых манипулятор не имеет общих точек с препятствиями, способны проводить логические сигналы возбуждения, ключевой элемент 9,соответствующий конечному положению., является генератором сигнала возбуждения,, а логические входы ключевого элемента 9, соответствующего текущему положению, подключаются через вторые элементы ИЛИ 13 ко входам f-стабильного триггера 5. Такая организация вычислительного блока 3 приводит к тому, что, после окончания общего запрещающего сигнала ключевой элемент 9, соответствующий конечному положению манипулятора, передает сигнал возбуждения на логические входы соседних ключевых элементов , который распространяясь по всем незаблокированным ключевым элементам 9, обходя заблокированные, достигает логических входов ключевого элемента 9, соответствующего текущему положению. Очевидно, что первым на одном из логических входов этого ключевого элемента 9.появится тот сигнал, который прошел по кратчайшему пути от генерирующего ключевого элемента 9. Пройдя через один из t элементов И 12 ключевого элемента 9, соответствующего текущему положению манипулятора, и соответствующий элемент ИЛИ 13,этот сигнал установит t-стабильный триггер 5 в состояние, соответствующее направлению, со стороны которого пришел первый сигнал возбуждения. Последующие сигналы,приходящие на
другие входы -стабильного триггера 5 не по кратчайшему, пути,состояния триггера 5 не изменяют. Мож-. но утверждать, что путь первого сигнала является воспроизводимой на логической сети моделью кратчайшего пути от текущего поло-г жения манипулятора к конечному. Фиксация первого сигнала соответствует акту принятия решения, заключающегося в выборе того направления, в котором нужно совершить перемещение манипулятору, с тем, ,минуя существующие в данньШ момент препятствия, по кратчайшему пути достигнуть конечное целевое положение. Состояние -стабильного триггера 5 сохраняется до тех пор, пока блок б исполнительных устройств не отработает элементарного шага движения. Окончание элементарного шага движения будет зафиксировано блоком 7 датчиков положения, и следовательно дешифратором 8, который выбирает следуюпшй ключевой элемент 9, соответствующий новому текущему положению манипулятора, и вырабатывает кратковременный запрещающий сигнал на своем выходе и тем самым заблокирует вычислительный блок 3. При этом t-стабильный триггер 5 вернется в исходное состояние и все описанные операции будут повторяться до тех пор пока манипулятор не достигнет конечного положения. В момент достижения конечного положения манипулятор останавливается. Останавливается он и тогда, когда в рабочей зоне возникают непроходимые препятствия и ожидгет до тех пор, пока не появится какой-либо свободный
путь.
. . Применение изобретения существенно расширяет функционсшьные возможности устройства управления и обеспечивает возможность его применения для управления роботами-манипуляторами, работакнцими в сложных динамических условиях внешней среды с 0 непредсказуемо перемещающимися препятствиями в рабочей зоне.
Формула изобретения
15
Устройство для управления адаптивным роботом-манипулятором по авт.св. № 716807, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит распределитель и последовательно соединенные блок датчиков положения и дешифратор, выходы которого подклюгчены ко вторым входам вычислительного блока, выходы блока исполнительных устройств соединены со входами блока датчиков положенияг а выходы вычислительного.блока через распределитель подключены ко входам
t-стабильного триггера.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 2478949/18-24, кл. В 25 J 3/00, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU849142A1 |
| Устройство для управления адаптивным роботом-манипулятором | 1985 |
|
SU1291388A1 |
| Устройство для управления адаптивным роботом | 1985 |
|
SU1252755A1 |
| Устройство для управления движением адаптивного робота | 1977 |
|
SU716807A1 |
| Устройство для управления движением адаптивного транспортного робота | 1983 |
|
SU1138786A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| Устройство для моделирования графов | 1984 |
|
SU1246110A1 |
| Устройство для определения кратчайшего пути автономного транспортного робота | 1986 |
|
SU1383387A2 |
| Устройство для моделирования графа | 1985 |
|
SU1278877A1 |