Изобретение относится к робототех нике и может быть использовано при создании адаптивных робототехнически систем, функционирующих в среде с ор ганиченной видимостью. Известно устройство для управления адаптивным роботом, содержшчее блок сенсорных элементов, блок формирования модели внешней среды, вычислительный блок, многостабильный триггер, приводы и датчики положения Г1Л., Однако такое устройство невозможн применять для работы в условиях ограниченной видимости. Наиболее близким по технической сущности к предлагаемому является устройство, содержащее последовательно соединенные тактильный датчик вычислительный блок, блок элементов ИЛИ, многостабильный триггер, приводы, датчики положения и дешифратор положения, первые и второй выходы ко торого подключены соответственно ко второму и третьему входам вычислител ного блока TSJ . Однако известное устройство ие обеспечивает управление многостепвнным исполнительным органом робота в условиях ограниченной видимости. Цель изобретения - расширение функциональньлх возможностей устройства. Поставленная цель достигается тем, что устройство содержит блок задания цели и блок возврата в предыдущее положение, первые входы которого соединены с выходами датчиков положения, второй вход - со вторым выходом дешифратора положений, третий вход - с выходом тактильного датчика, а выходы со вторьми входами приводов, первые и второй выходы блока задания цели подключены соответственно к четвертым и пятому входам вычислительного блока. При этом вычислительный блок содержит п ключей, первый, второй, третий, четвертый и пятый входы каждого из которых соединены с одноименными входами вычислительного блока, первый выход каждого цппча подключен к соответствукядему шестому входу В соседних ключей, а вторые выходы - к выходам вычислительного блока, причем . Кроме того, каждый ключ содержит последовательно соединенные элемент ИЛИ и первый элемент И, а также вторые элементы И, триггер и третий элемент И, первый вход которого подключей к первому входу ключа, второй вход - ко второму входу ключа и первым входам вторых элементов И, а выход - к первому входу триггера, соединенного вторым входом с пятым входом ключа, а выходом - со вторым входом первого И, третий |вход которого подключен к .третьему входу ключа, а выход - к первому выходу ключа, первый вход элемента ИЛИ
соединен с четвертым входом ключа, а вторые входы - с шестыми входами ключа и V вторыми входами вторых элементов И, выходы которых подключены ко вторым выходам ключа.
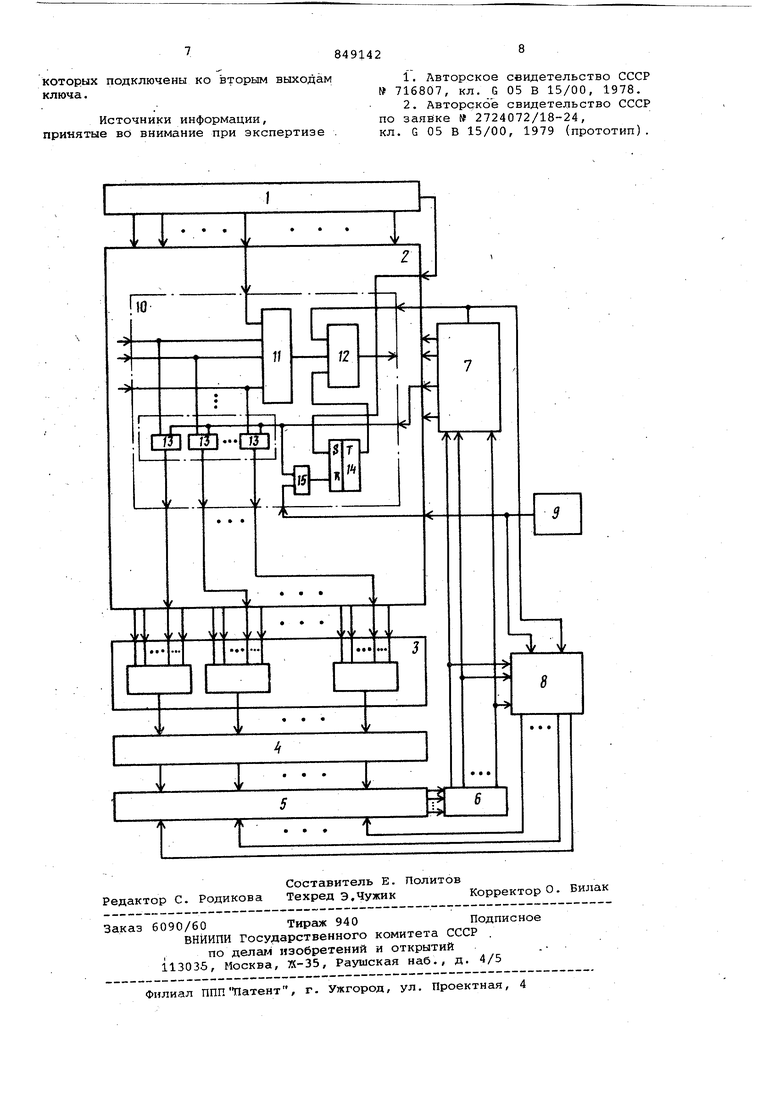
На чертеже представлена функциональная схема предлагаемого устройства.
Устройство содержит блок 1 задания целей, вычислительный блок 2, блок 3 элементов ИЛИ, многостабильный триггер 4, приводы.5, датчики б положения, дешифратор. 7 положений, блок 8 возврата в предыдущее положение, тактильный датчик 9, ключи 10, элемент ИЛИ 11, первый элемент И 12, вторые элементы И 13, триггер 14, третий элемент И 15,
Устройство управления работает следующим образом.
Перед началом работы всего устройства на втором выходе блока 1 задания целей появляется кратковременный сигнал, который поступает на пятые входы всех ключей 10 и устанавливает триггеры 14 этих ключей в единичное состояние. Перед выполнением каждого элементарного акта движения на втором выходе дешифратора 7 положений появляется кратковременный запрецающий сигнал, который поступает на третьи входы первых элементов И 12 всех ключей и блокирует их.
Ключи 10, соответствугацие конечным целевым положениям, выделяются блоком 1 задания целей. При этом последний формирует на информационном четвертом входе ключа 10 единичный сигнал, в результате чего данный ключ 10 становится генератором сигнала возбуждения, который поступает на логические входы В соседних ключе 10 после снятия общего запре1лающего сигнала с второго выхода дешифратора 7 положения..
Дешифратор 7 положений формирует на основании информации, поступаемой от датчиков б положений, единичный сигна(л на втором входе того ключа 10 соответствует текущему положению манипулятора. При этом вторые элементы И 13 данного ключа 10 открываются и тем самым пропускают сигналы, поступающие на шестые входы данного ключа 10 через соответствующие элементы ИЛИ блока 3 на входы многостабильного триггера 4, так же открывается при этом третий элемент И 15 этого же ключа 10 и подготавливается для пропускания на нулевой вход триггера 14 единичного сигнала, который может прийти от тактильного датчика 9 в случае соприкосновения манипулятора с препятствием в рабочей зоне.
Такая организация вычислительного блока 2 приводит к тому, что после окончания общего запрещающего сигнала ключ 10, соответствующий конечному положению манипулятора, начинает передавать сигнал возбуждения на логические входы соседних ключей 10, который, распространяясь по ключам 10, достигает логические входы ключа 10, соответствующего текущему положению. Очевидно, что первым на одном из логических входов этого ключа 10 появляется тот сигнал, который прошел по кратчайшему пути от генерирующего ключа 10. Пройдя через один
0 из вторых элементов И 13 ключа 10, соответствующего текущему положению, манипулятора, и соответствующий элемент ИЛИ блока 3, этот сигнал устанавливает моностабильный триггер 4 в состояние, соответствующее направлению, со стороны которого прошел первый сигнал возбуждения. Последующие сигналы, приходящие на другие входы многостабильного триггера 4 не по кратчайшему пути, состояния многостабильного триггера 4 не изменяют.
Таким образом, путь первого сигнала является воспроизводимой в вычислительном блоке 2 моделью кратчайшего пути от текущего положения манипулятора к конечному. Фиксация первого сигнала соответствует акту принятия решения, заключающегося в выборе того направления, в котором нужно совершать перемещение манипулятору, с тем, чтобы по кратчайшему пути достичь конечное целевое положение. Состояние многостабильного триггера 4 сохраняется до тех пор, пока приводы 5 не отработают элементарного шага движения. Окончание элементарного шага движения фиксируется датчиками б положения. При этом информация об отработке элемен- тарного шага движения от датчиков 6 положения запоминается в блоке 8 возврата в предыду1цее положение, а дешифратор 7 положения выбирает следующий ключ 10, соответствуквдий новому текущему положению манипулятора, и вырабатывает кратковременный запрещающий сигнал на своем втором выходе, тем самым блокируя всю сеть. При этом многостабильный триггер 4 возвращается в исходное состояние,
Q И все описанные операции повторяются до тех пор, пока манипулятор не достигнет конечного, положения.
Если после перехода из предьвдущего положения манипулятора в новое
5 положение происходит соприкосновение
с препятствием, то тактильный датчик 9 вырабатывает сигнал, который переводит триггер 14 ключа 10, соответствующего текущему положению, в нулевое состояние, в результате чего на единичном выходе триггера 14 появляется нулевой сигнал, который поступает на вход первого элемента И 12 И; закрывает его, при этом данная .-ячейка переходит в заблокированное состояние. При этом также по сигналу от тактильного датчика $ срабатывает блок 8 возврата в предьщущее положение и вырабатывает на основании ранее запомненной информации о предыдущем шаге сигналы, которые, поступа на приводы 5, возвращают манипулятор в предыдущее положение.
Окончание,отработки элементарного шага возврата также фиксируется датчками 6 положения и, следовательно, дешифратором 7 положений, который вырабатывает запрещающий сигнал на своем втором выходе и тем самым прекращает работу блока возврата в предыдущее положение.
После этого процедура моделирования кратчайшего пути, выделения первого шага и отработка его приводами 5 возобновляется, но уже при условии, что ключ 10, соответствующей положению манипулятора, в котором он имеет общие точки с препятствием, будет заблокирован. При этом моделируемые вычислительным блоком 2 пути уже не проходят через ключ 10, соответствующий запрещенному положению, и, следовательно, манипулятор не попадает в данное запрещенное прложение.
После некоторого времени функционирования в результате соприкосновения манипулятора с препятствиями, блокируется множество ключевых элементов, соответствующих положениям манипулятора, в которых он имеет общие точки с существующими в рабочей зоне манипулятора препятствиями. После этого, манипулятор функционирует в данной рабочей зоне, не соприкасаясь с препятствиями, т.е. устройство управления как бы ащаптируется к дан ной ситуации в рабочей зоне манипулятора и После этой адаптации управляет манипулятором без соприкосновений с препятствиями.
При изменении ситуации в рабочей зоне (например, если манипулятор закреплен на транспортном средстве, которое переместилось в другой участок внешней среды) процесс адаптации происходит заново, так как препятствия в другом участке.внешней среды имеют другие размеры и другие координаты. Перед функционированием манипулятора в новой ситуации происходит установка всех ключей 10 вычислительног:о блока 2 в незаблокированное состояние путем подачи на едини нйе
входы триггеров 14 всех ключей 10 кратковременного единичного сигнала от второго выхода блока 1 задания целей . Затем устройство функционирует так, как-описано выше.
Применение предлагаемого устройства позволяет расширить его функциональные возможности За счет обеспечения управления многостепенным манипулятором робота в среде с ограниченной видимостью.
0
Формула изобретения
1.Устройство для управления адаптивным роботом, содержащее последовательно соединенные тактильный датчик,
5 вычислительный блок, блок элементов ИЛИ, многостабильный триггер, приводы, датчики положения и дешифратор положений, первые и второй выходы которого подключены соответственно ко
0 вторым и третьему входам вычислительного блока, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит блок задания цели и блок возврата в предыдущее положение, пер5вые входы которого соединены с выходами датчиков положения, второй входсо вторым выходом дешифратора положения, третий вход - с выходом тактильного датчика, а выходы - со вто0рыми входами приводов, первые и второй выходы блока задания цели подключены соответственно к четвертым
и пятому входам вычислительного блока.
5
I
2.Устройство по п. 1, отличающееся тем, что вычислительный блок содержит п- ключей, первый, второй, третий, четвертый и пятый
0 входы каждого из которых соединены
с одноименными входами вычислительного блока, первый выход каждого ключа подключен | соответствукнцему шестому входу Е соседних ключей, а вторые выходы - к выходам вычислитель5ного блока, причем .
3.Устройство по пп. 1и2, отличающееся тем, что каждый ключ содержит последовательно соединенные
0 элемент ИЛИ и первый элемент И, а также вторые элементы И, триггер и третий элемент И, первый вход которого подключен
к первому входу ключа, второй вход ко второму входу ключа и первым вхо5дам вторых элементов И, а выход - к первому входу триггера, соединенного вторым входом с пятым входом ключа, а выходом - со вторым входом первого элемента И, третий вход которого под0ключен к третьему входу ключа, а выход - к первому выходу ключа, первый вход элемента ИЛИ соединен с четвертым входом ключа, а вторые входы с шестыми входами ключа и вторыми 5 входами вторых элементов И, выходы
которых подключены ко вторым выходам ключа.
Источники информации, принятые во внимание при экспертизе .
1.Авторское свидетельство СССР 716807, кл. G 05 В 15/00, 1978.
2.Автордкое свидетельство СССР по заявке №2724072/18-24,
кл. G 05 В 15/00, 1979 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом-манипулятором | 1985 |
|
SU1291388A1 |
| Устройство для управления адаптивным роботом | 1985 |
|
SU1252755A1 |
| Устройство для управления адаптив-НыМ РОбОТОМ-МАНипуляТОРОМ | 1979 |
|
SU812561A2 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| Устройство для управления робототизированным комплексом | 1985 |
|
SU1278203A1 |
| ИЗМЕРИТЕЛЬ НАКЛОНА ВАЛА РОТОРНОГО МЕХАНИЗМА | 2003 |
|
RU2253088C1 |
| Устройство для задания циклов в системах числового программного управления | 1989 |
|
SU1619233A1 |
| Устройство для управления вычислительной системой | 1982 |
|
SU1037267A1 |
| Устройство для управления перемещением механизма по замкнутой трассе | 1988 |
|
SU1594486A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
